This sequence explores the principles of Control Theory in robotics, focusing on feedback loops and the implementation of PID controllers to achieve stability and precision in dynamic systems.
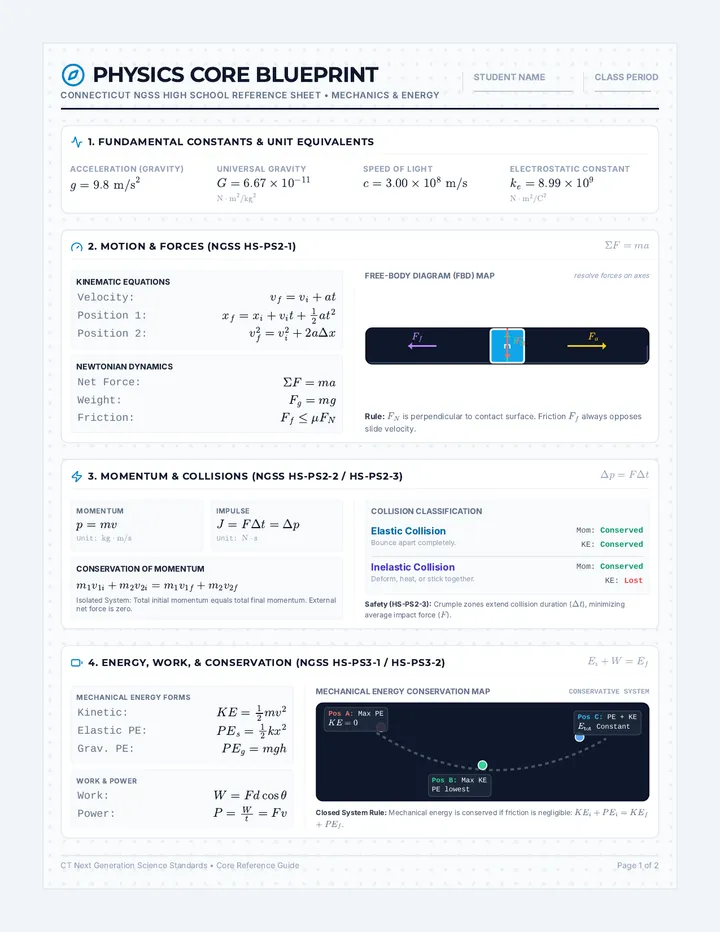
A comprehensive high school physics curriculum sequence aligned with the Connecticut Next Generation Science Standards (CT-NGSS), focusing on core concepts, quantitative problem-solving, and visual models.
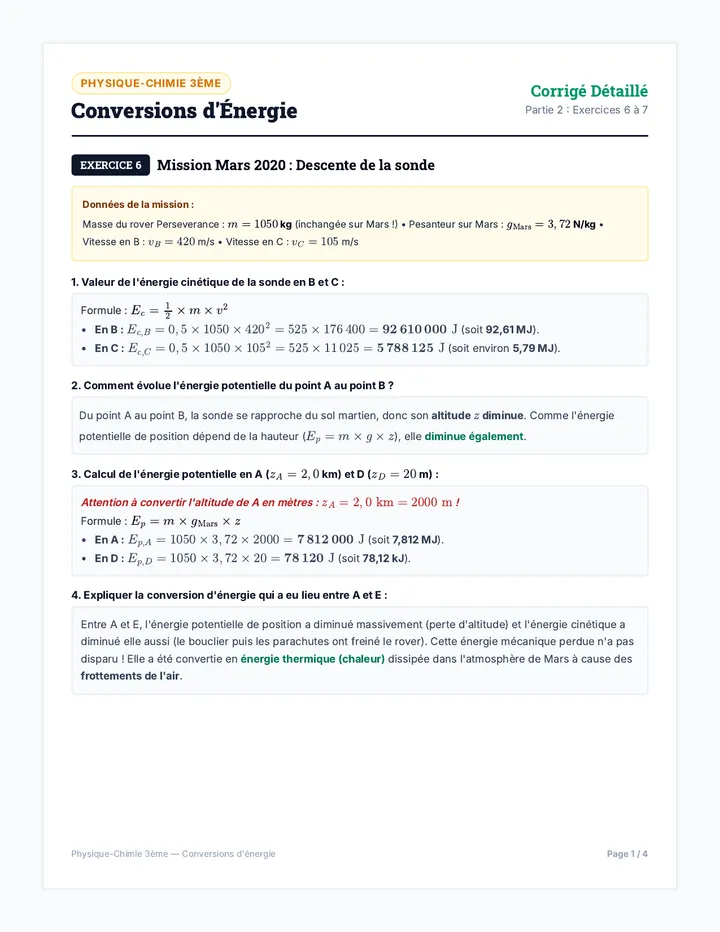
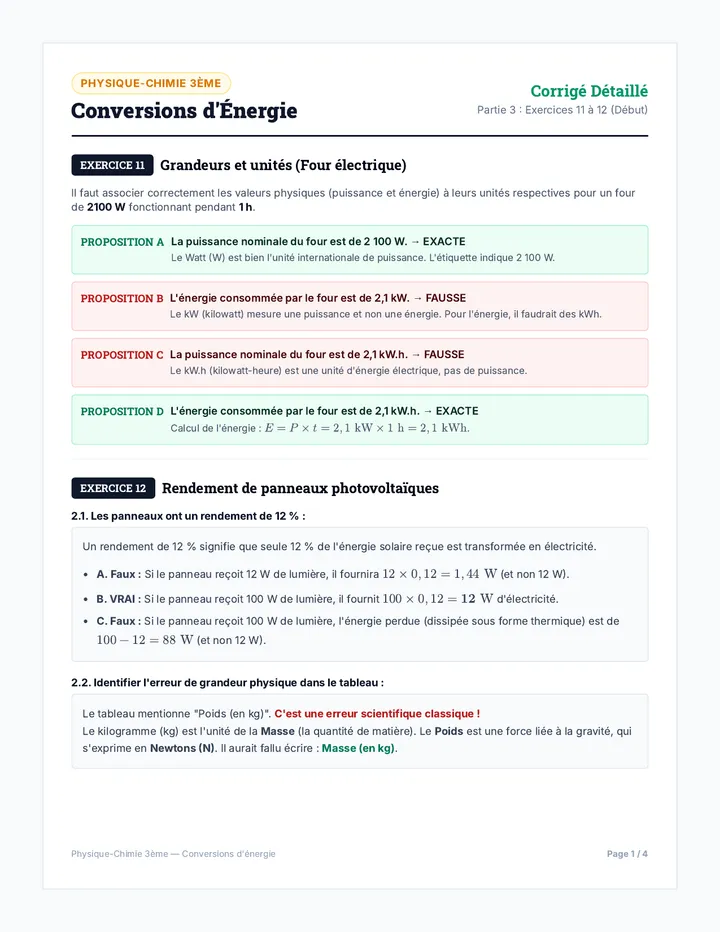
Corrigé ultra-pédagogique et complet des 15 exercices de physique-chimie de 3ème sur les conversions d'énergie. Conçu pour faciliter la compréhension profonde, avec des fiches mémo et des astuces visuelles pour mémoriser les formules clés.
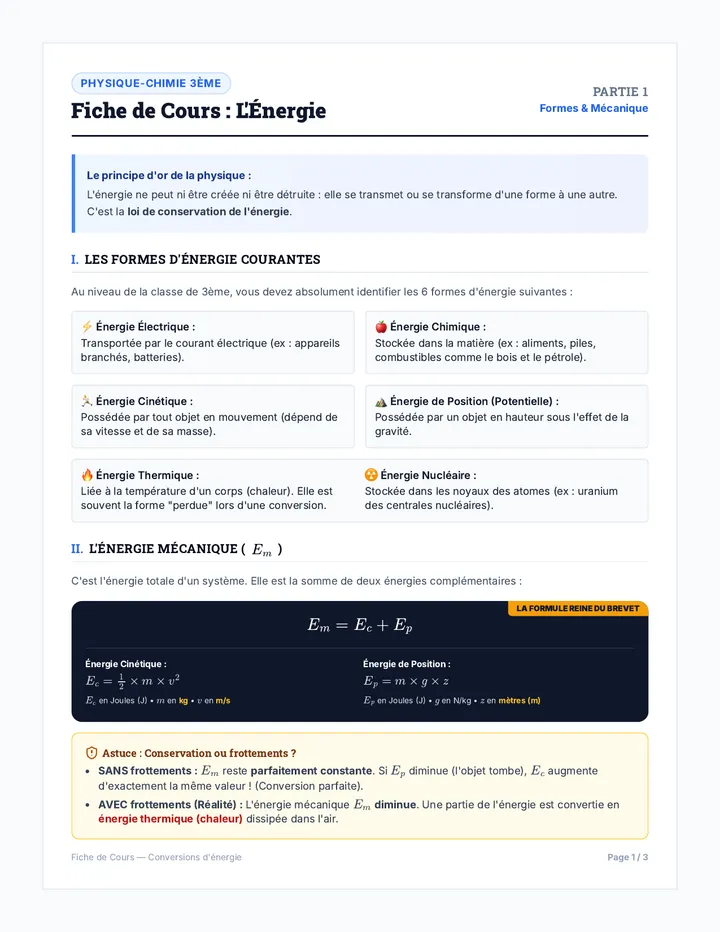
Cours complet, structuré et ultra-pédagogique sur les conversions d'énergie pour les élèves de 3ème. Contient des explications claires, des exemples concrets et des astuces indispensables pour réussir le brevet.
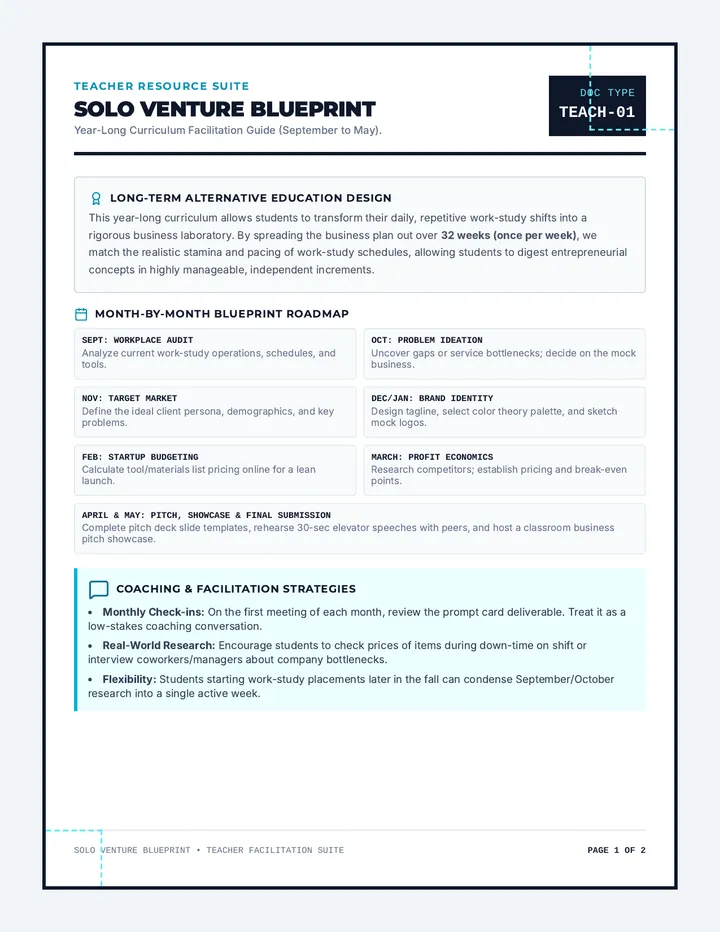
A year-long, self-paced entrepreneurship curriculum spanning September to May for alternative education students in work-study placements. Students transform real-world work experience into a modular business plan and slide presentation.
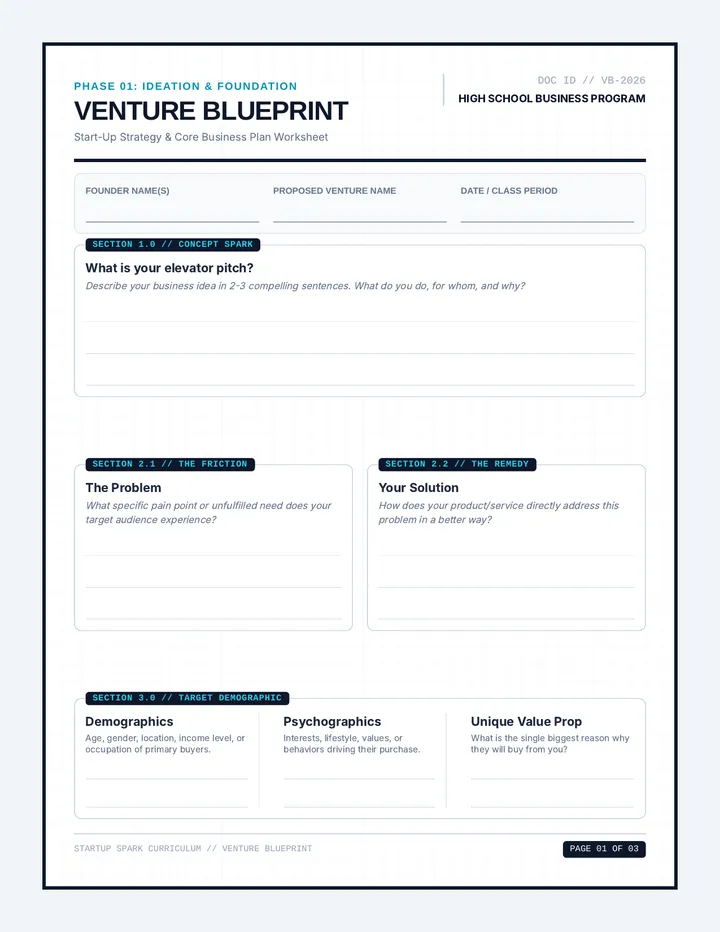
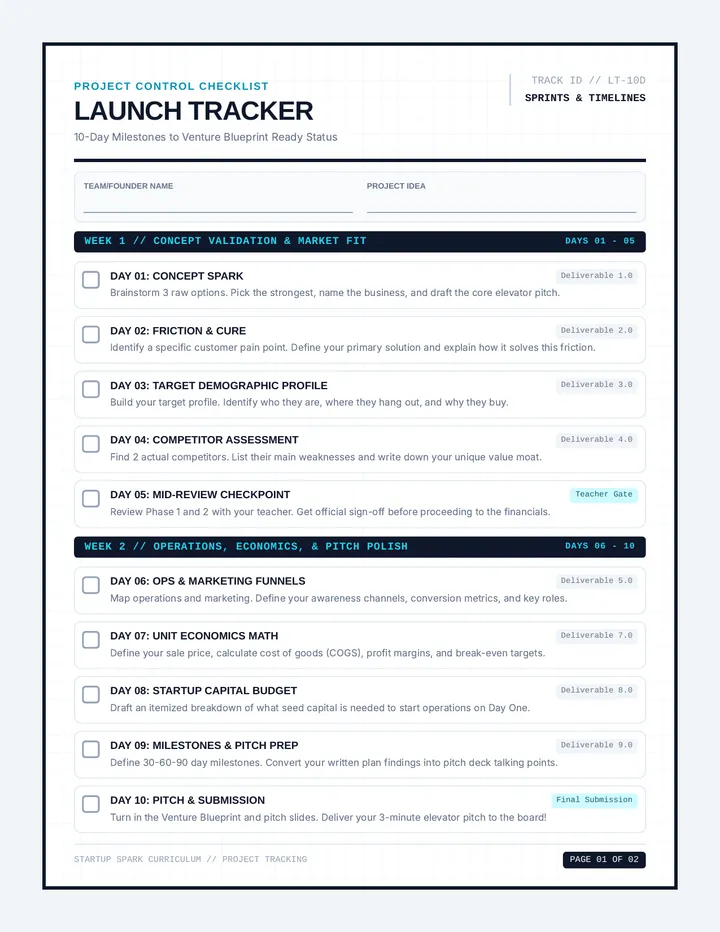
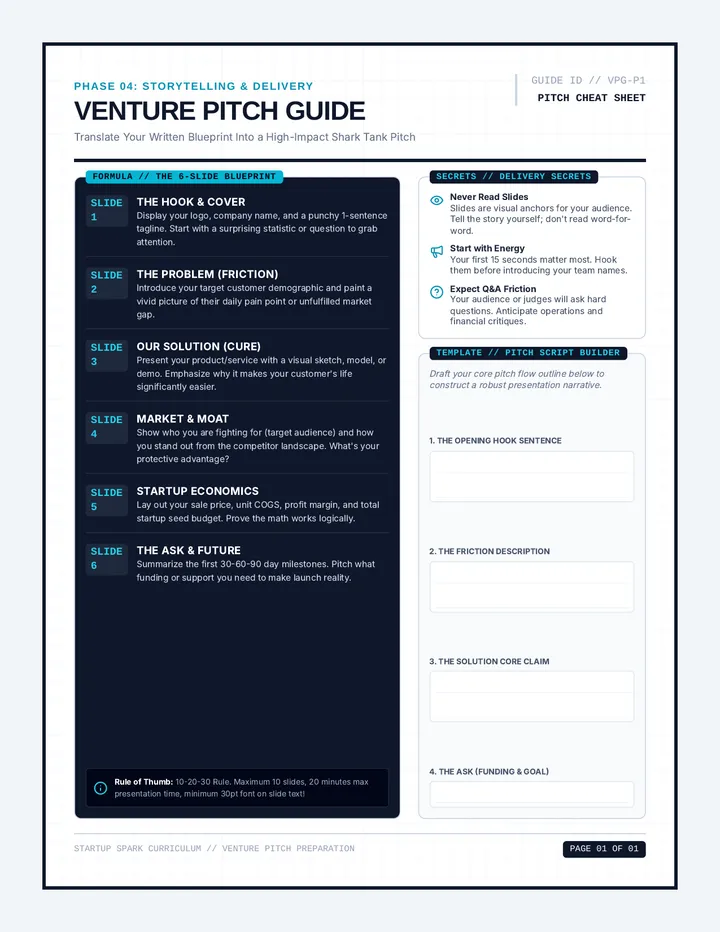
A comprehensive, step-by-step framework for high school students to design, structure, and refine a small business startup concept. Includes guided drafting templates, pacing checklists, and pitch preparation tools.
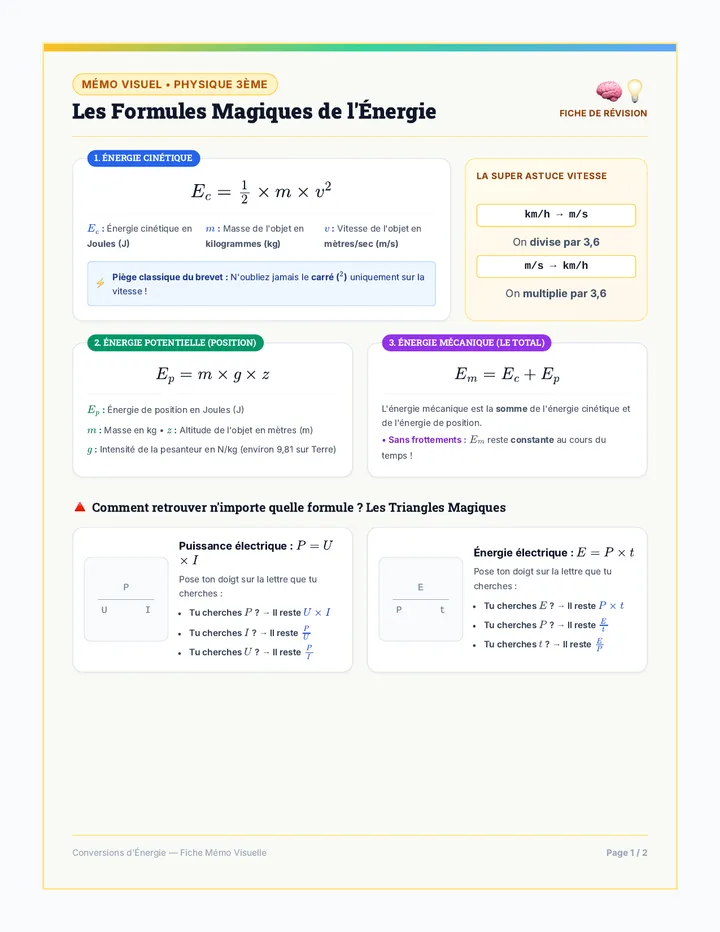
Fiches mémo synthétiques contenant des cartes mentales, des triangles magiques de formules et des astuces visuelles indispensables pour retenir les formules clés de physique-chimie de 3ème sur l'énergie.
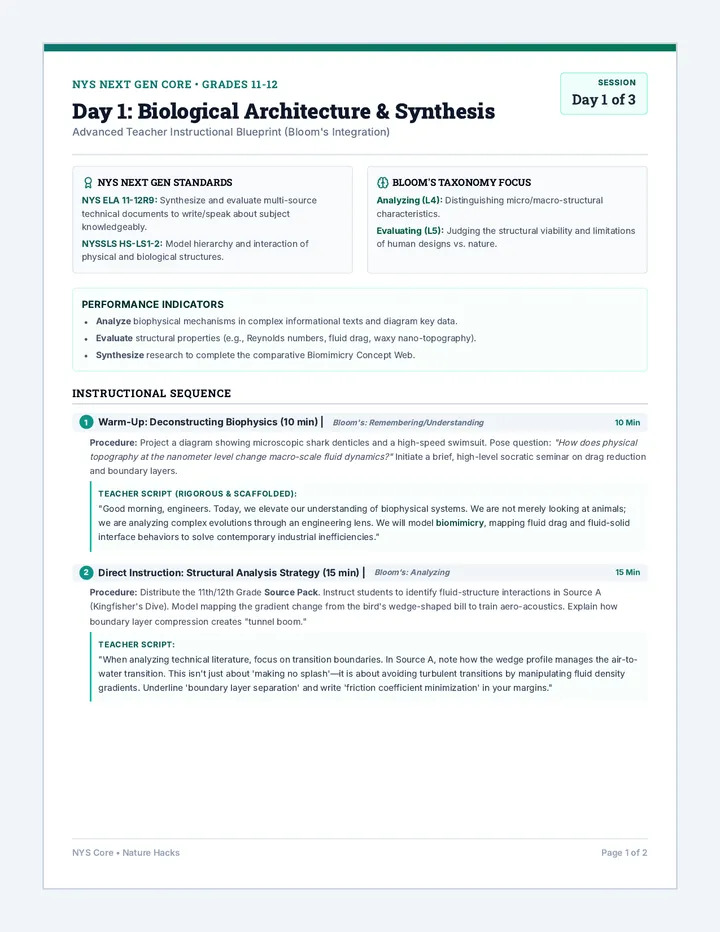
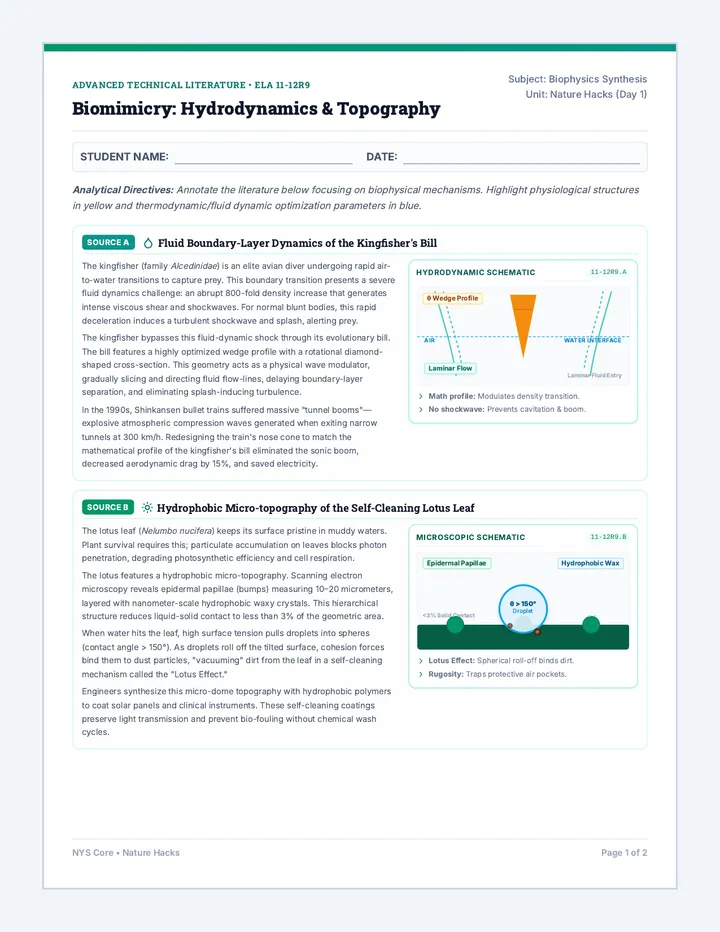
A 3-day cross-curricular STEAM unit where students research biological adaptations, design biomimetic engineering solutions, perform scale calculations, and write a synthesized informational article.
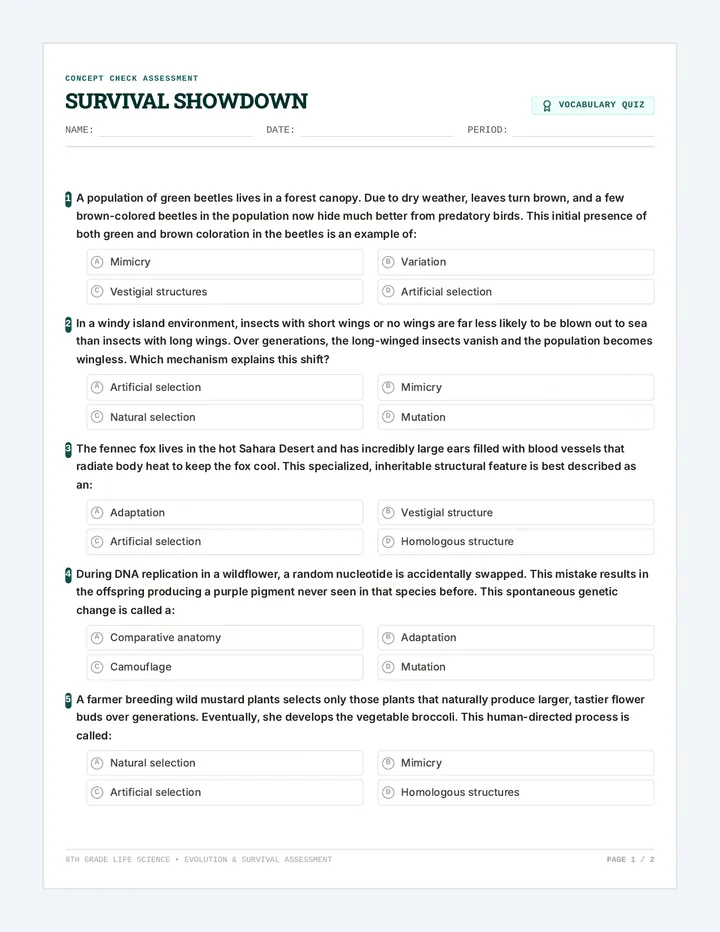
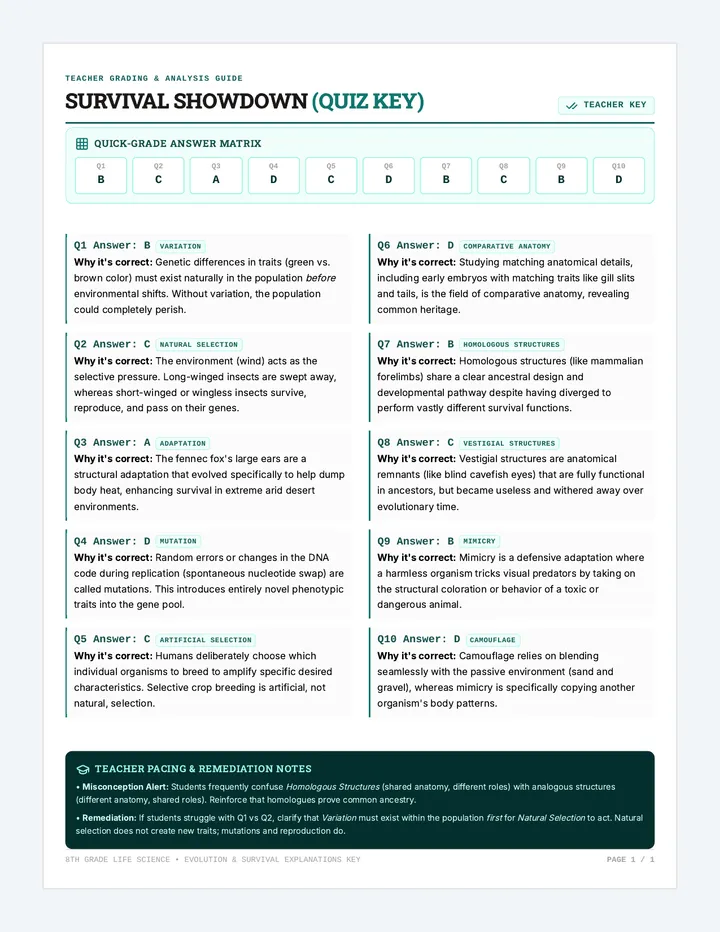
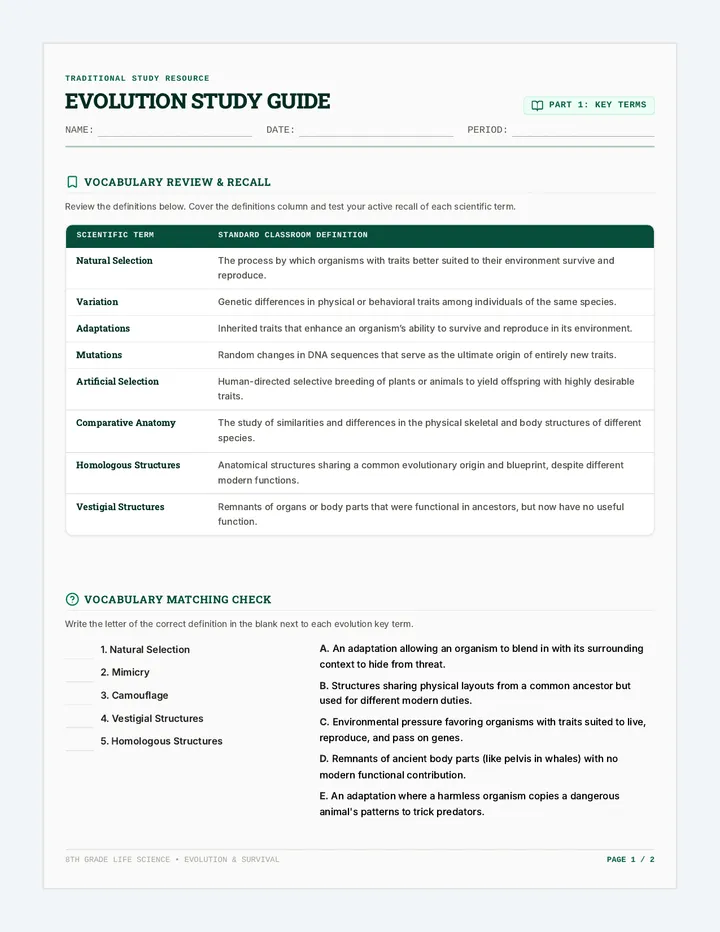
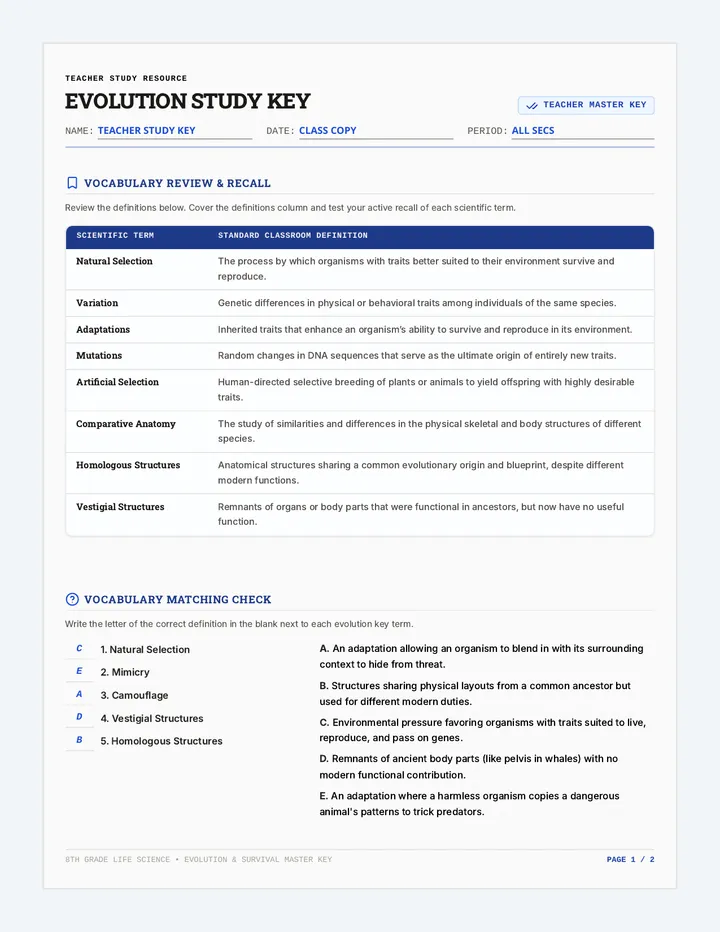
An active-recall study unit on natural selection and evolutionary evidence, featuring graphic organizers, application activities, and a practice quiz.
Troisième partie du corrigé ultra-pédagogique sur les conversions d'énergie (Exercices 11 à 15). Traite du fonctionnement des fours, des panneaux solaires, des thermoplongeurs d'aquarium, du navire écologique MANTA et des véhicules électriques.
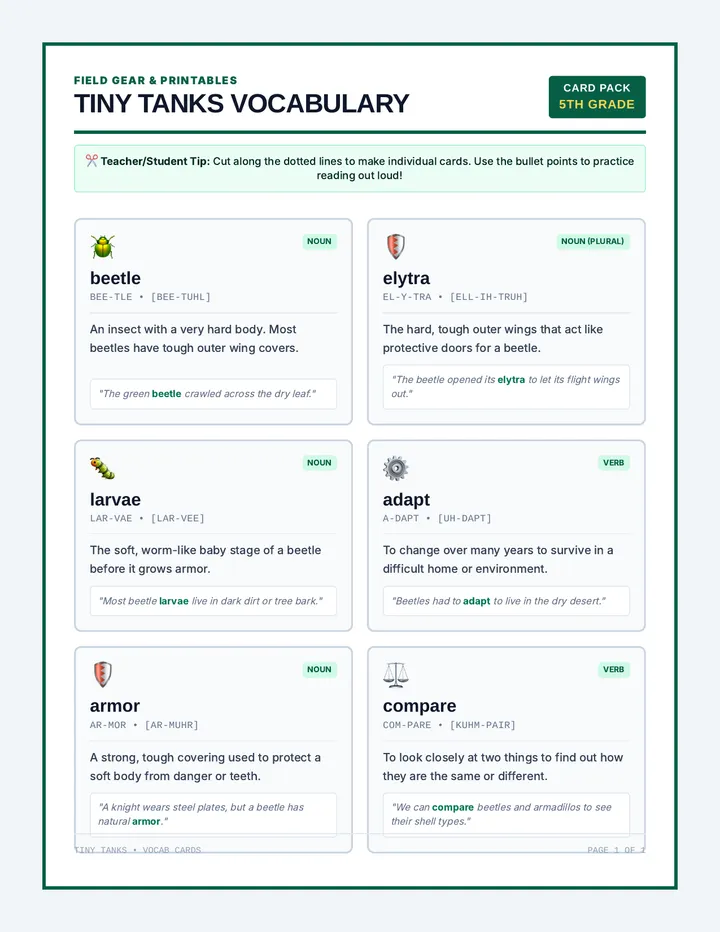
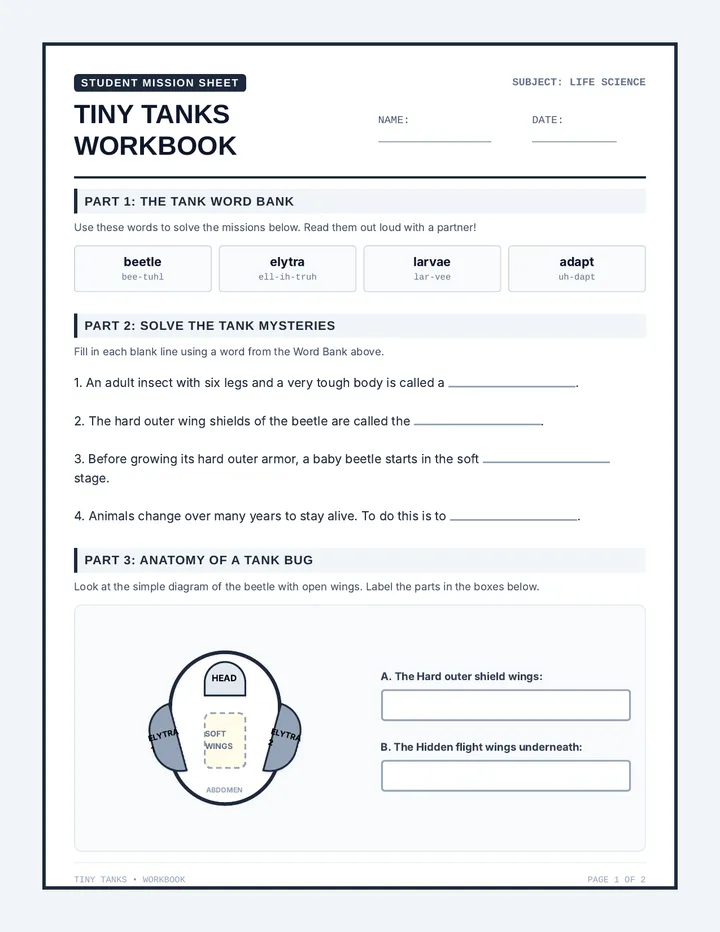
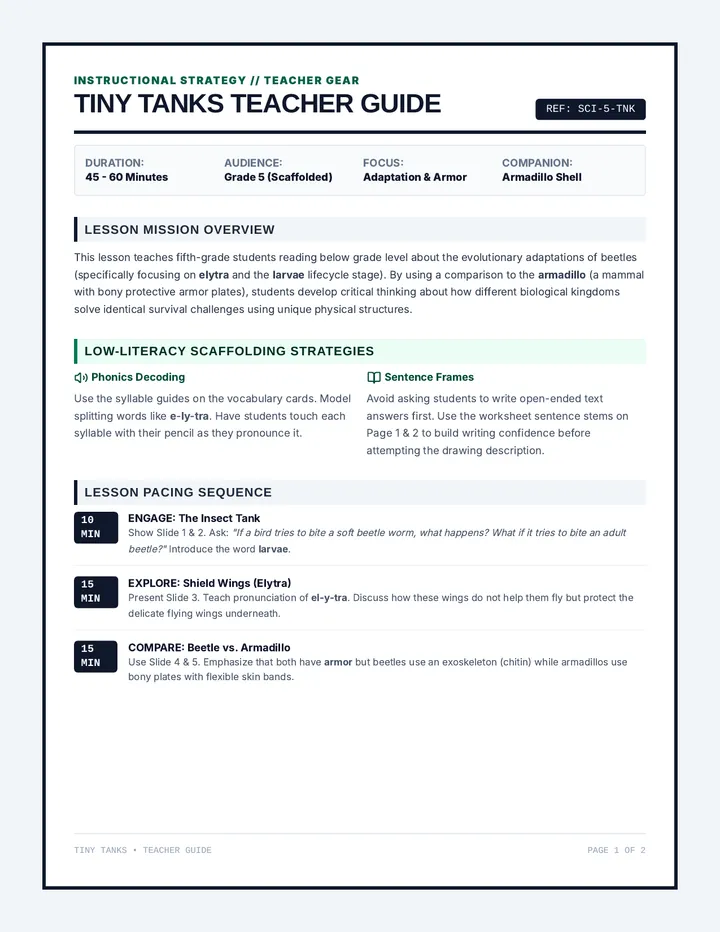
An engaging, highly visual science lesson exploring beetles as the armored tanks of the insect world, designed specifically for fifth-grade students reading below grade level. Students learn about elytra, beetle adaptation, and compare insect armor to that of the armadillo through scaffolded activities.
Deuxième partie du corrigé ultra-pédagogique sur les conversions d'énergie (Exercices 6 à 10). Comprend des explications de physique spatiale, de thermique du bâtiment, d'énergétique musculaire et industrielle.
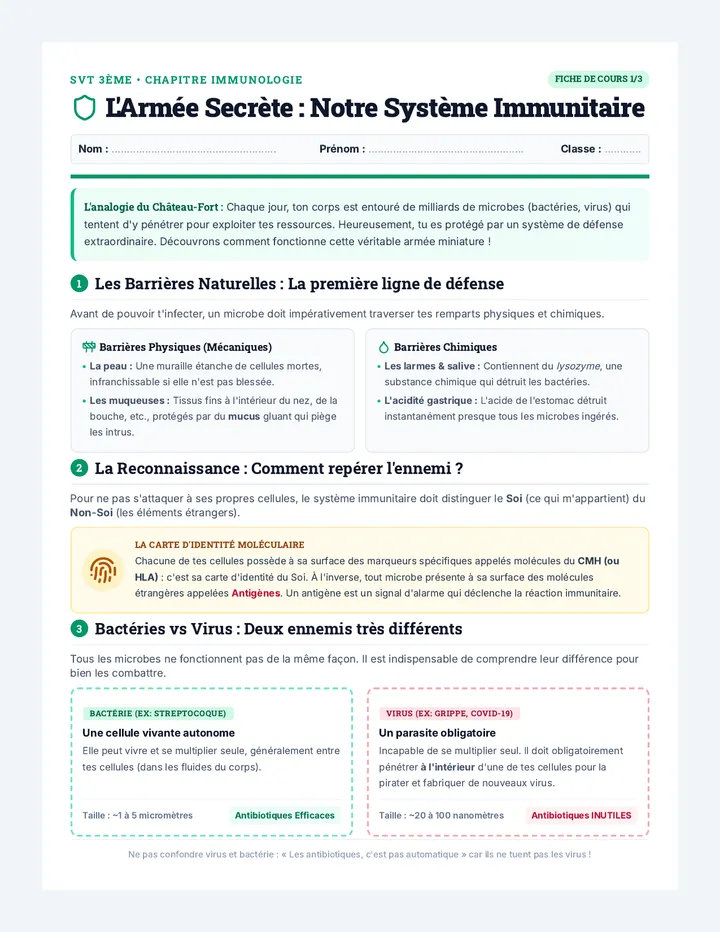
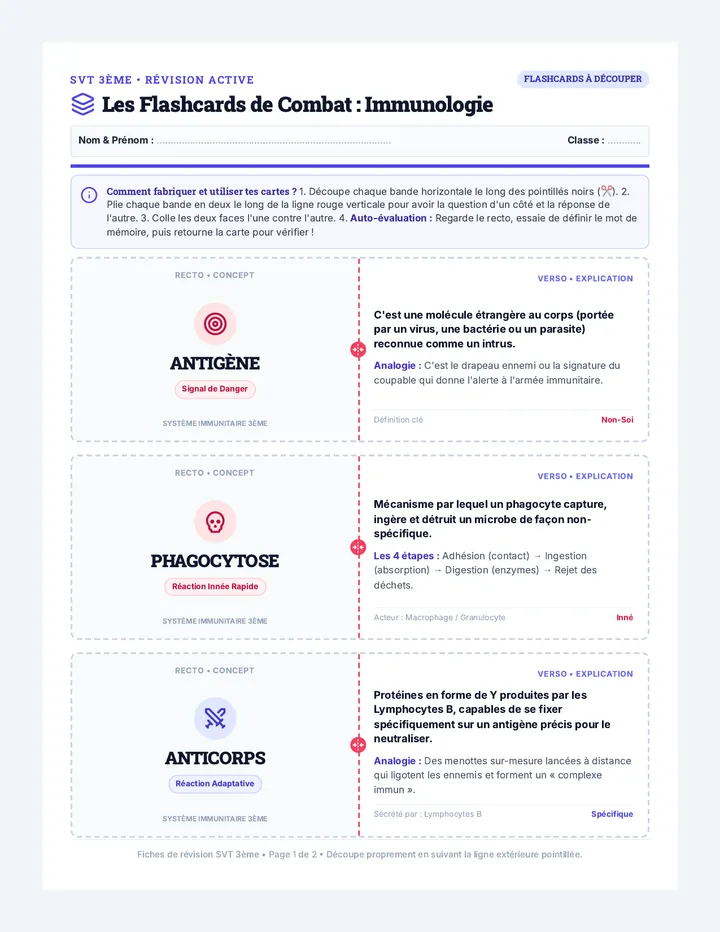
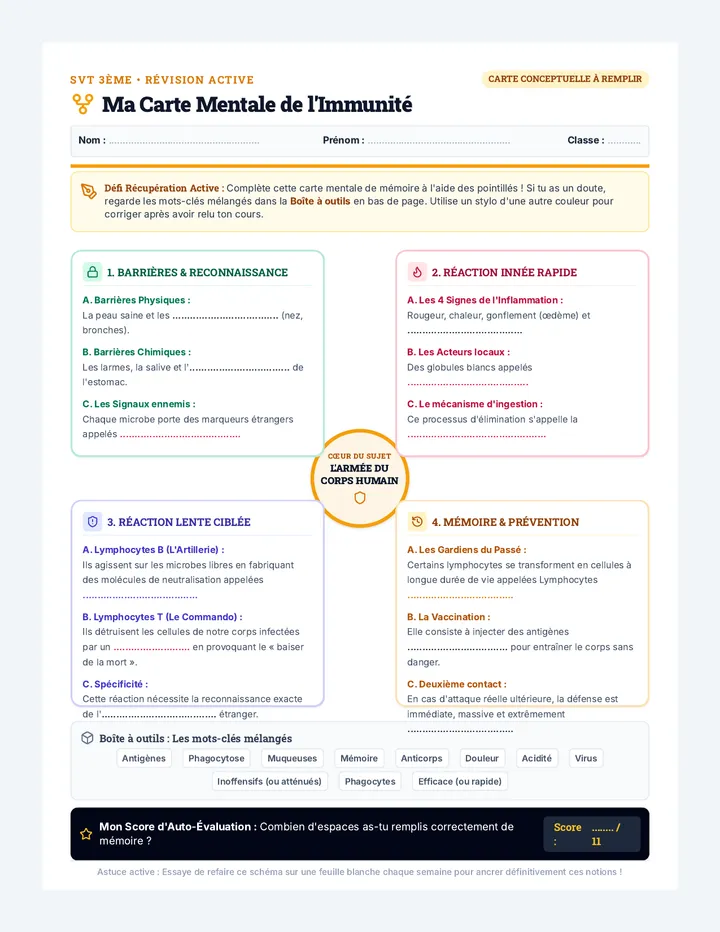
Une leçon complète et ultra-pédagogique de SVT (niveau 3ème) sur le système immunitaire. Conçue avec des analogies percutantes, des schémas structurés et des outils de révision active pour garantir la compréhension et la mémorisation de tous les élèves.