In this capstone project, students design a stability control algorithm for a self-balancing robot or drone. They demonstrate mastery by creating a system that maintains equilibrium in a dynamic environment.
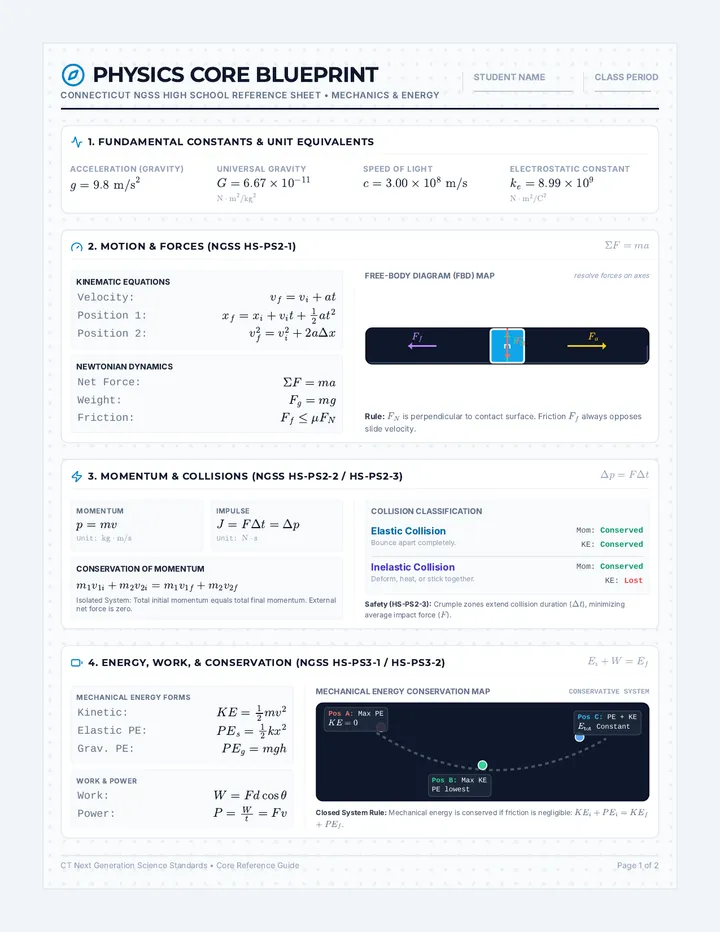
A comprehensive high school physics curriculum sequence aligned with the Connecticut Next Generation Science Standards (CT-NGSS), focusing on core concepts, quantitative problem-solving, and visual models.
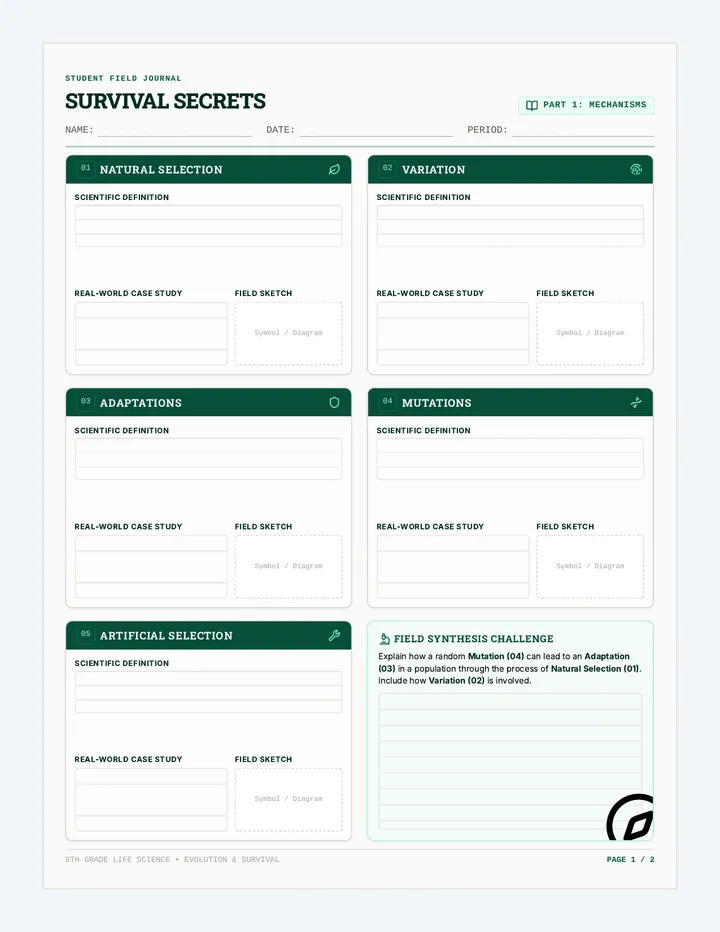
An active-recall study unit on natural selection and evolutionary evidence, featuring graphic organizers, application activities, and a practice quiz.
Complete teacher answer key for the Evolution Study Guide, containing completed vocabulary matching and high-quality exemplar written responses styled in blue ink.
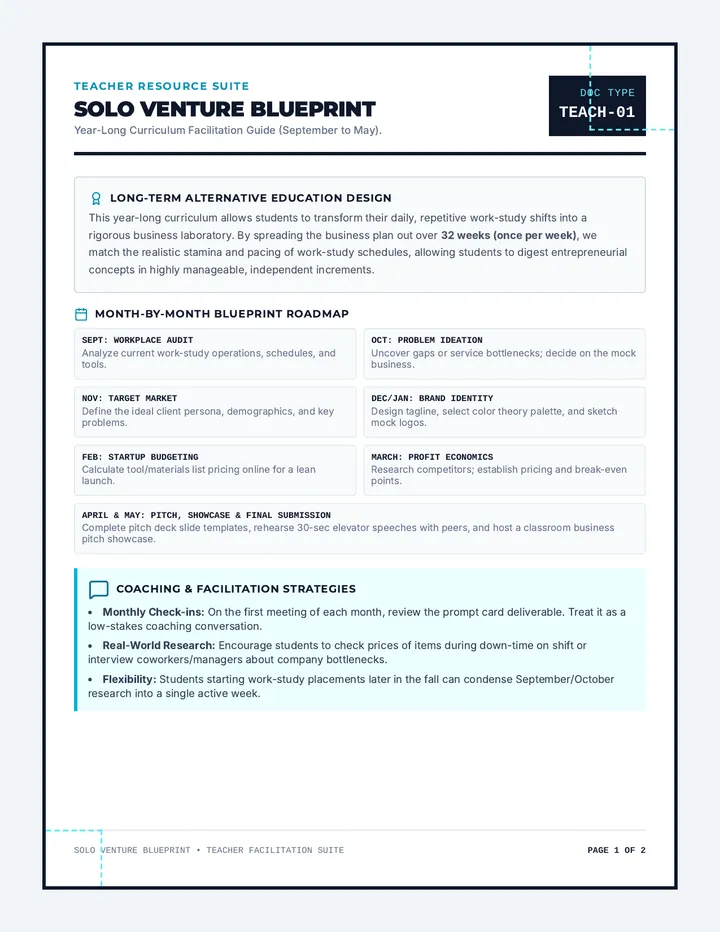
A year-long, self-paced entrepreneurship curriculum spanning September to May for alternative education students in work-study placements. Students transform real-world work experience into a modular business plan and slide presentation.
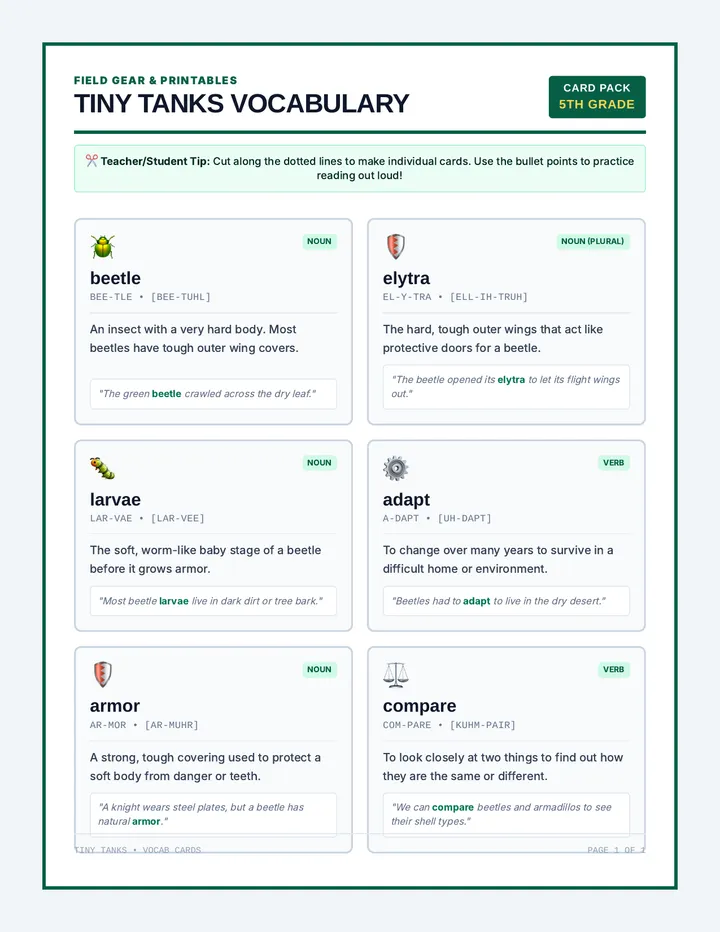
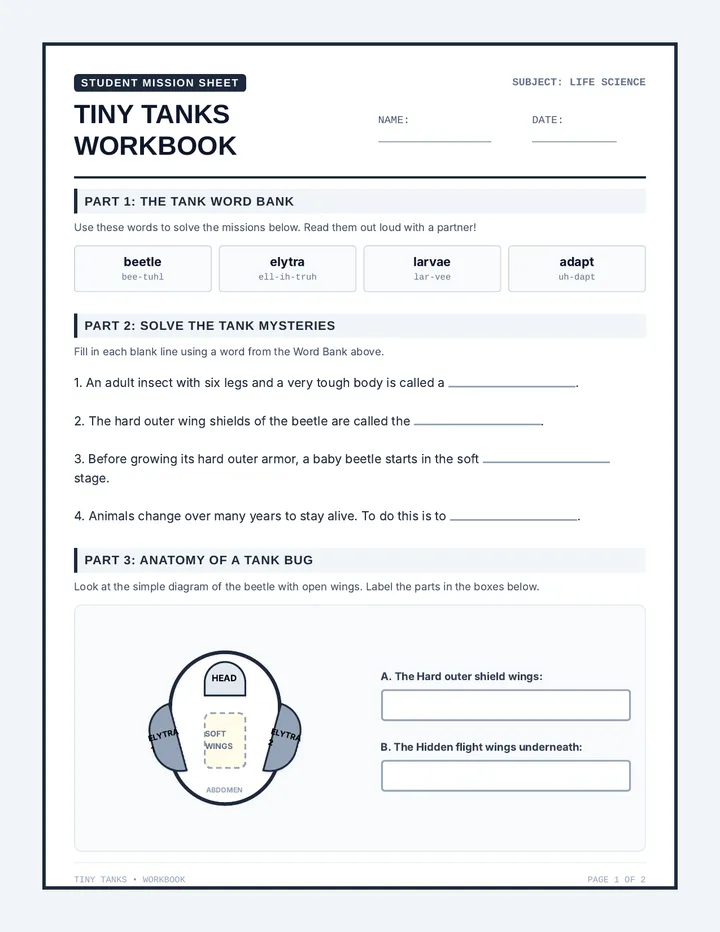
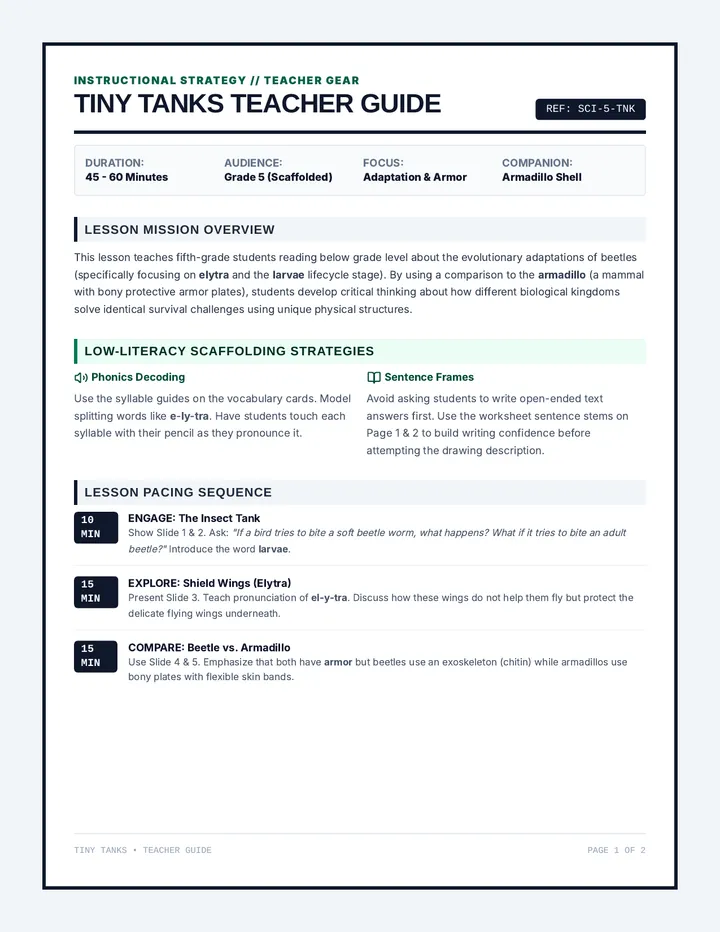
An engaging, highly visual science lesson exploring beetles as the armored tanks of the insect world, designed specifically for fifth-grade students reading below grade level. Students learn about elytra, beetle adaptation, and compare insect armor to that of the armadillo through scaffolded activities.
A traditional 2-page print-ready study guide for 8th-grade science, featuring direct definitions, structured vocabulary matching, and four scenario-based short-answer practice questions.
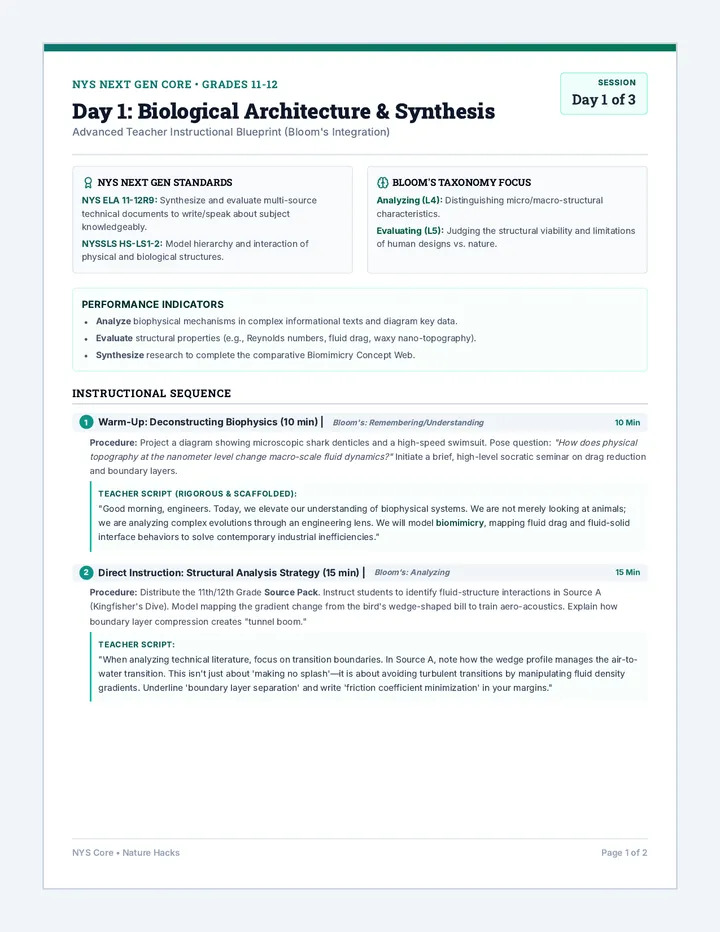
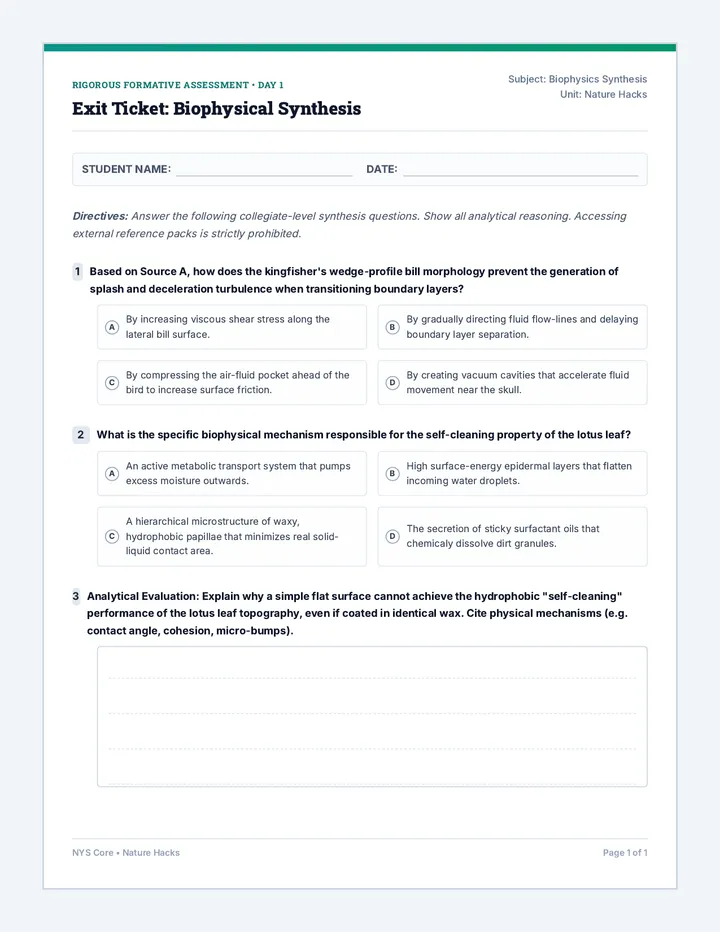
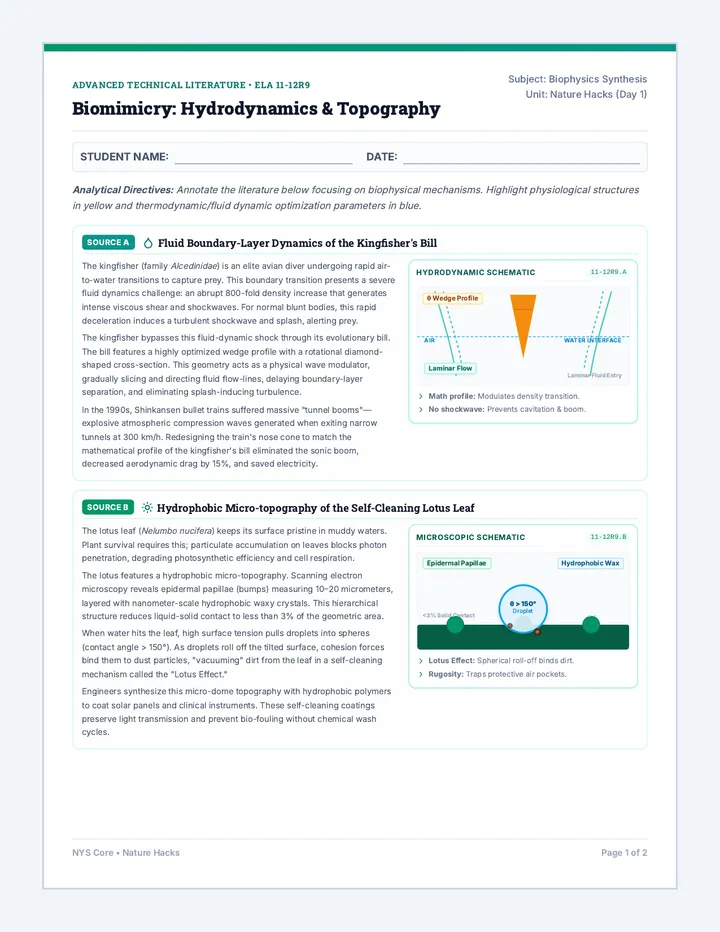
A 3-day cross-curricular STEAM unit where students research biological adaptations, design biomimetic engineering solutions, perform scale calculations, and write a synthesized informational article.
A lesson focused on the physics of hitting a home run in baseball. Students explore cause-and-effect relationships and vocabulary context clues through a reading passage, followed by comprehension questions and a creative writing prompt.
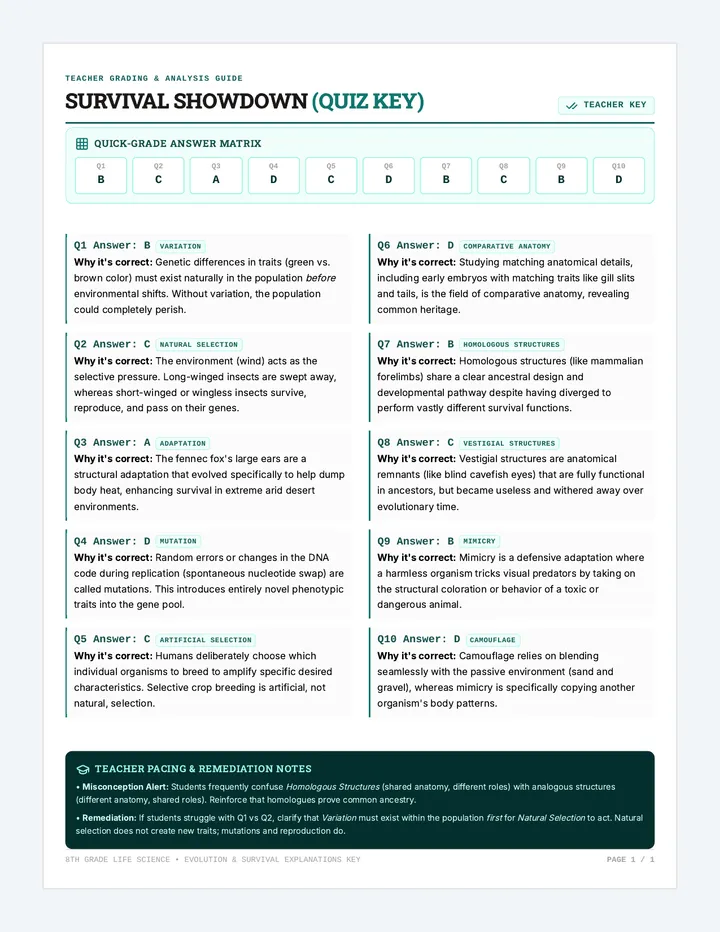
A detailed single-page teacher answer key and pedagogical guide for the Survival Showdown Quiz, containing a quick-grade matrix and thorough explanations for why each option is correct or incorrect.
An introductory 3-day coding unit for 6th-grade students using Micro:bits. Students learn basic programming concepts like algorithms, loops, and event handlers through interactive physical computing and cooperative pair programming.
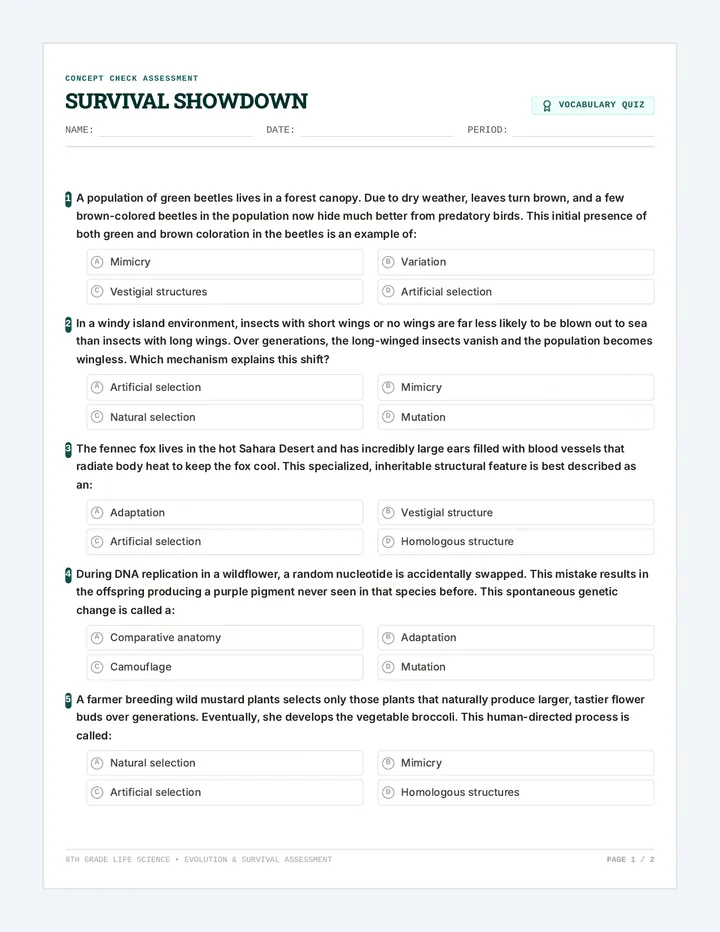
A 10-question application-based multiple-choice practice quiz for 8th-grade science students, testing their mastery of natural selection and evidence of evolution vocabulary under real-world scenarios.
A collection of foundational reference sheets, formula grids, and problem-solving templates designed to support Connecticut high school physics students across all NGSS units.