Students implement a Particle Filter to solve the global localization problem (the 'kidnapped robot' problem). They will simulate thousands of particles to represent the posterior distribution of the robot's pose.
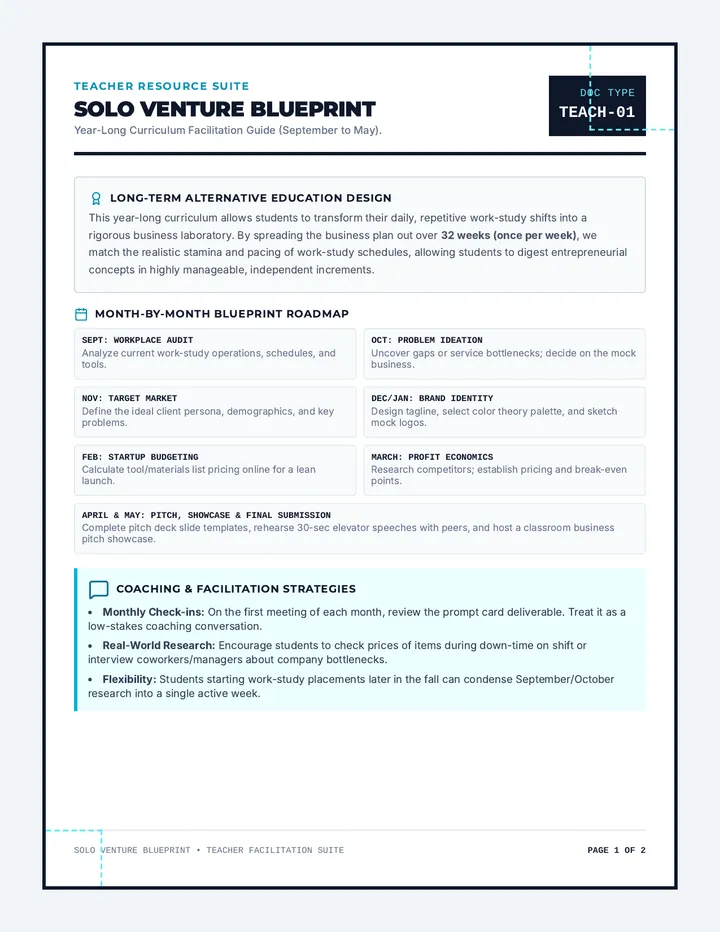
A year-long, self-paced entrepreneurship curriculum spanning September to May for alternative education students in work-study placements. Students transform real-world work experience into a modular business plan and slide presentation.
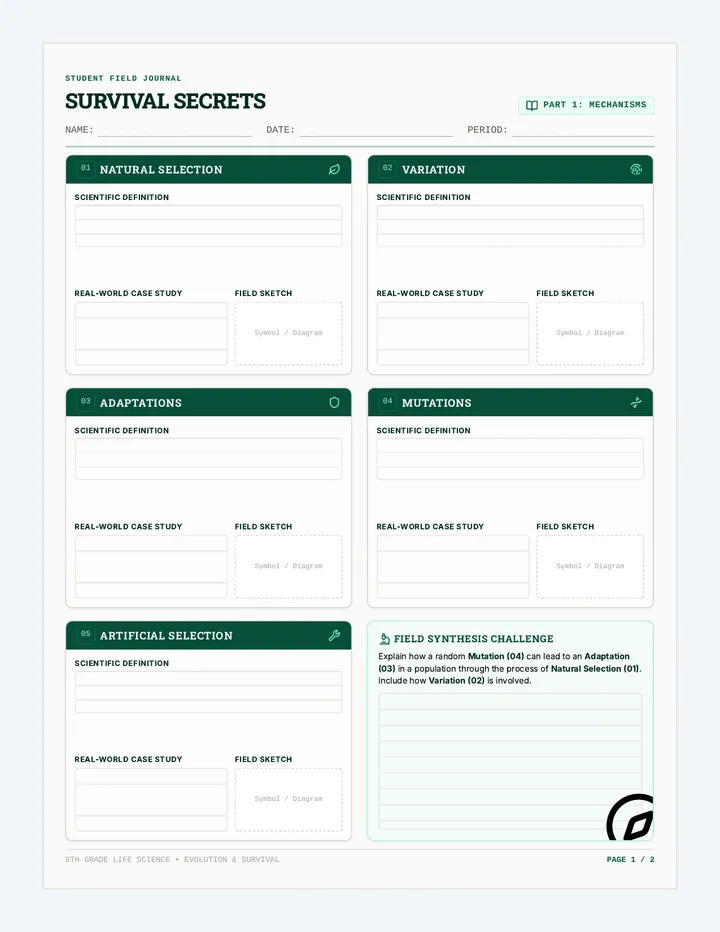
An active-recall study unit on natural selection and evolutionary evidence, featuring graphic organizers, application activities, and a practice quiz.
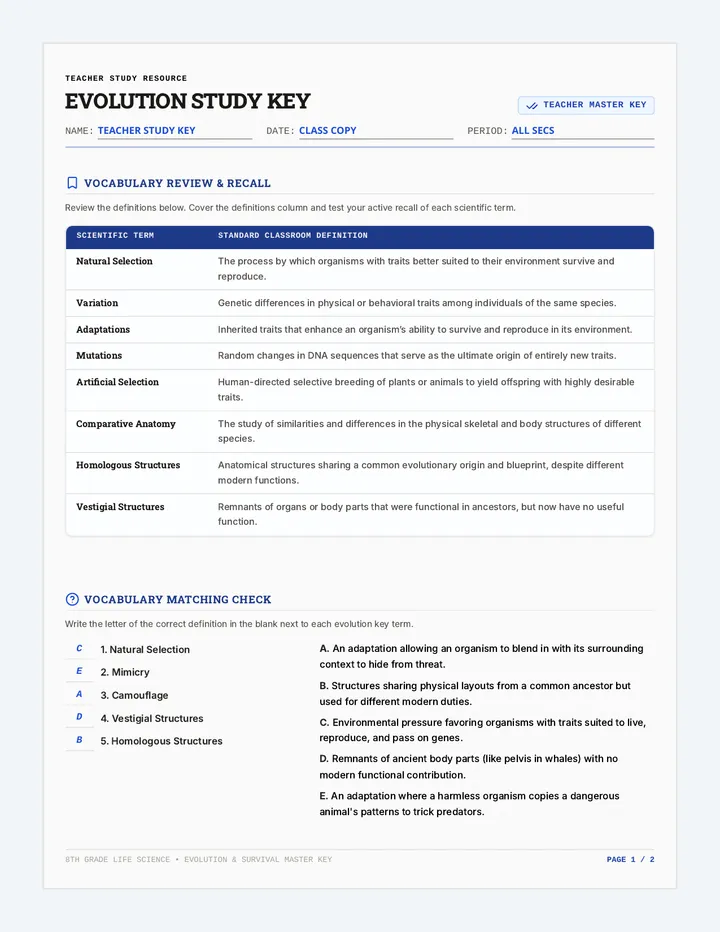
Complete teacher answer key for the Evolution Study Guide, containing completed vocabulary matching and high-quality exemplar written responses styled in blue ink.
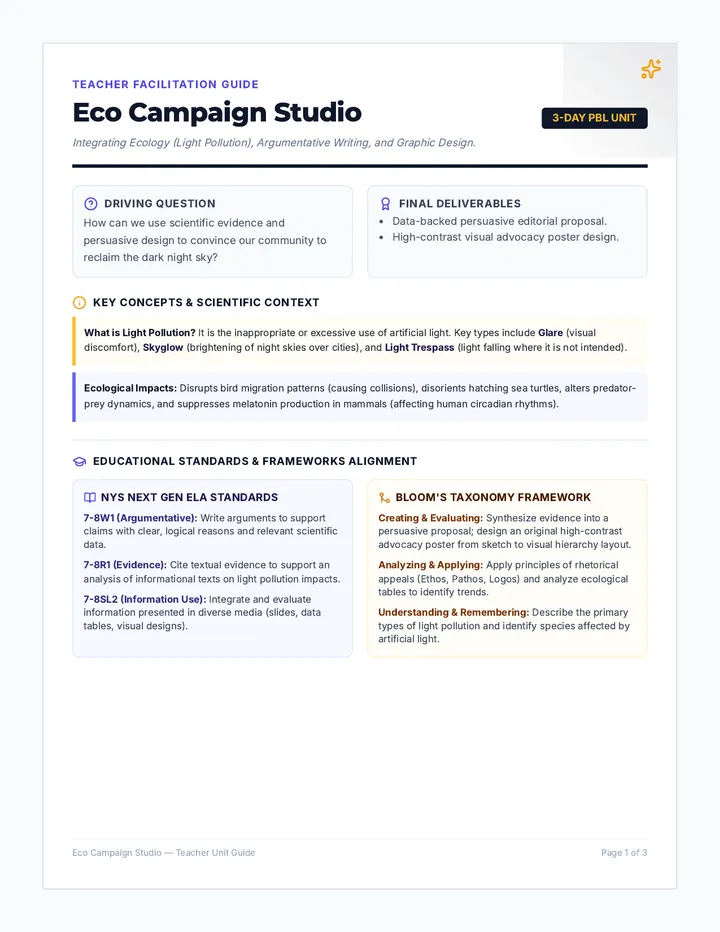
A cross-curricular, 3-day project-based unit combining science, argumentative writing, and graphic design. Students investigate the ecological impacts of light pollution, write a data-driven persuasive proposal, and design a community awareness campaign poster.
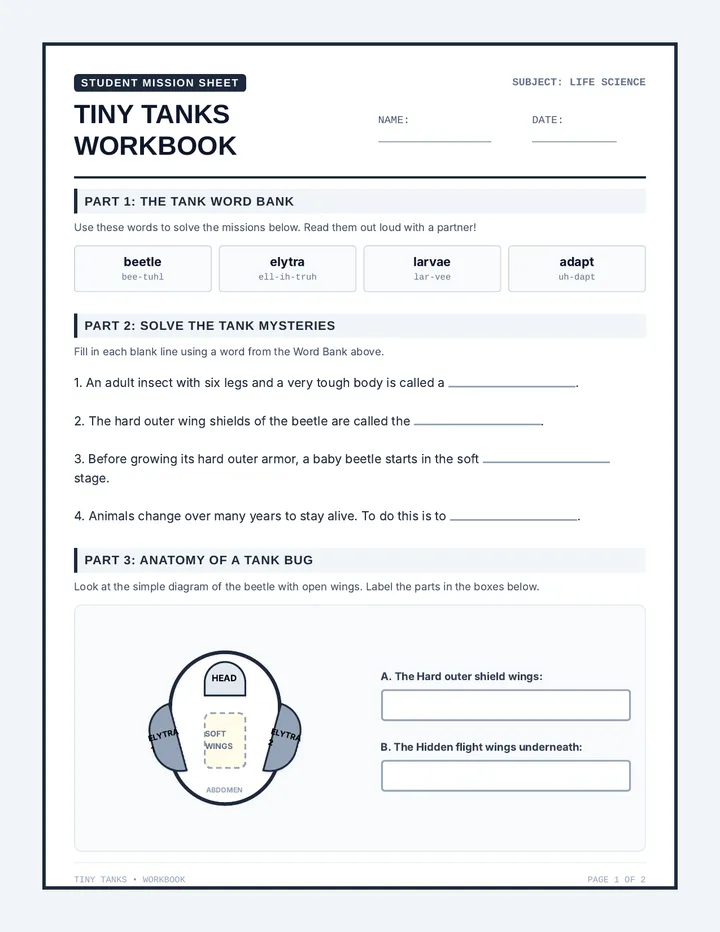
An engaging, highly visual science lesson exploring beetles as the armored tanks of the insect world, designed specifically for fifth-grade students reading below grade level. Students learn about elytra, beetle adaptation, and compare insect armor to that of the armadillo through scaffolded activities.
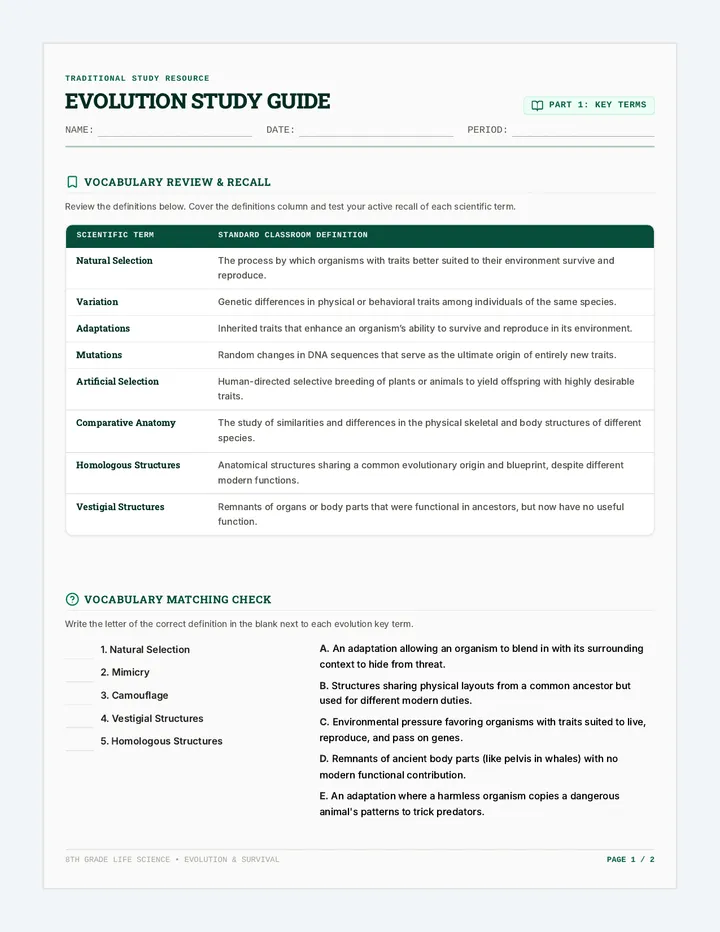
A traditional 2-page print-ready study guide for 8th-grade science, featuring direct definitions, structured vocabulary matching, and four scenario-based short-answer practice questions.
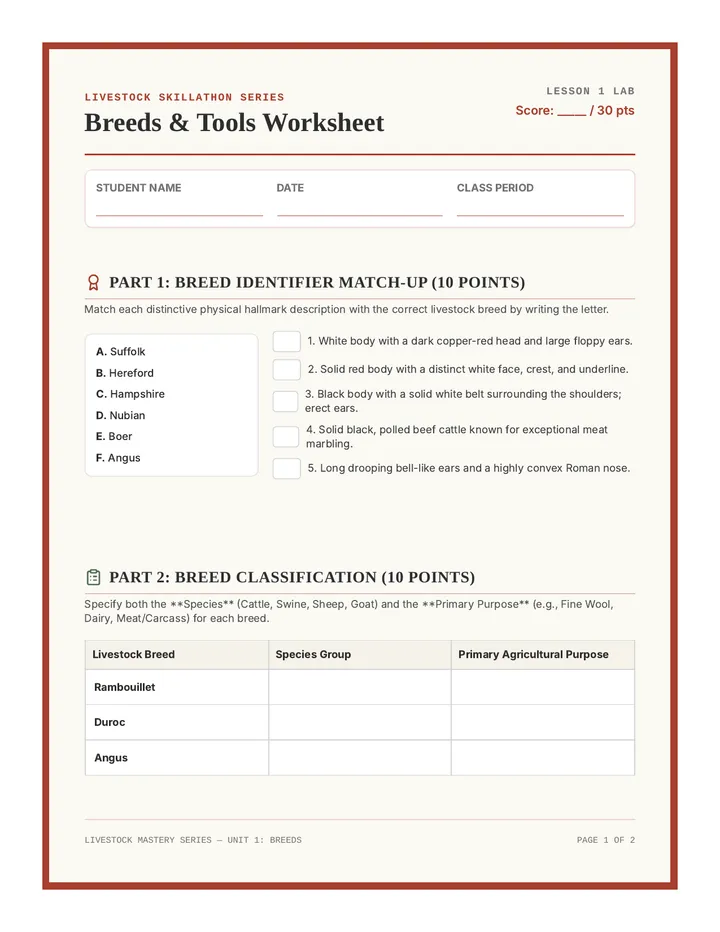
An immersive preparation program that equips agriculture students with the hands-on identification and evaluation skills needed to conquer competitive Livestock Skillathon contests.
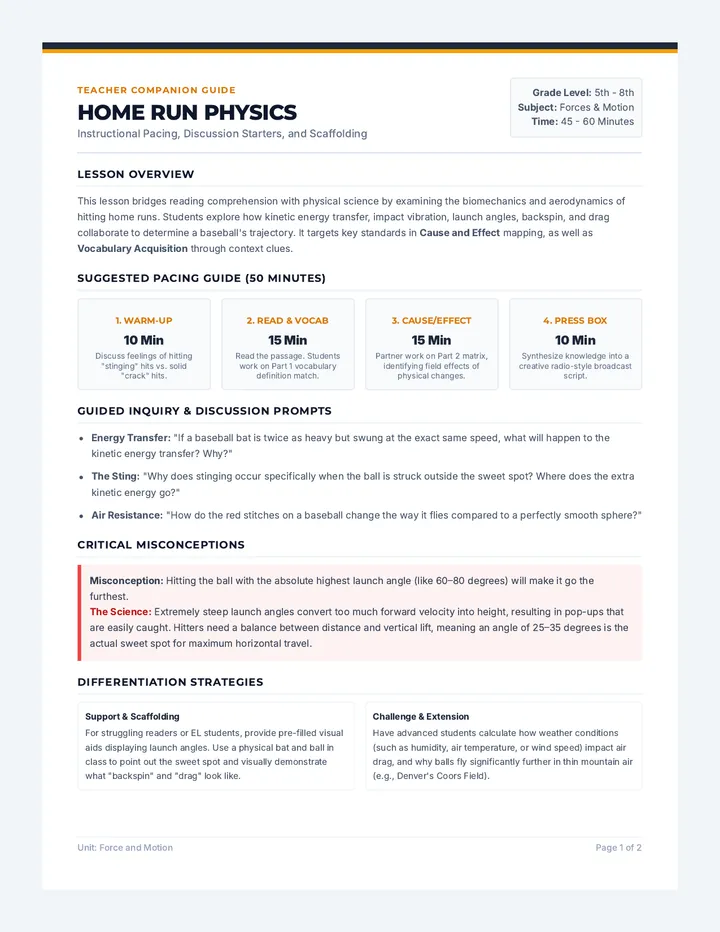
A lesson focused on the physics of hitting a home run in baseball. Students explore cause-and-effect relationships and vocabulary context clues through a reading passage, followed by comprehension questions and a creative writing prompt.
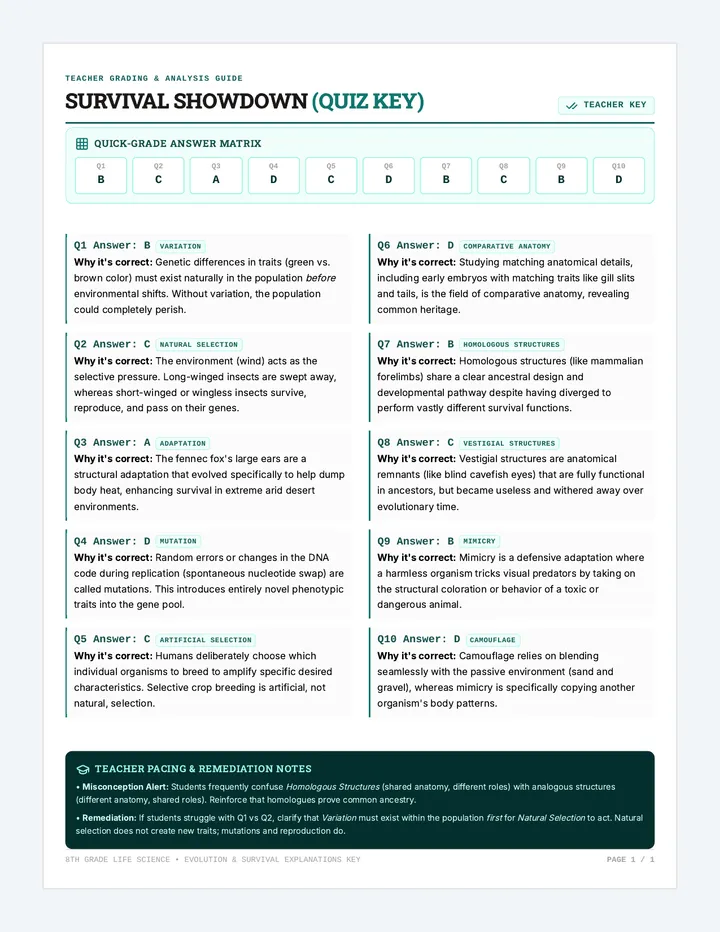
A detailed single-page teacher answer key and pedagogical guide for the Survival Showdown Quiz, containing a quick-grade matrix and thorough explanations for why each option is correct or incorrect.
A comprehensive unit on rainforest ecology, climate regulation, and conservation. Students explore the structural layers of the rainforest, their roles as carbon sinks, the threats of deforestation, and collaborative solutions for preservation.
An introductory 3-day coding unit for 6th-grade students using Micro:bits. Students learn basic programming concepts like algorithms, loops, and event handlers through interactive physical computing and cooperative pair programming.
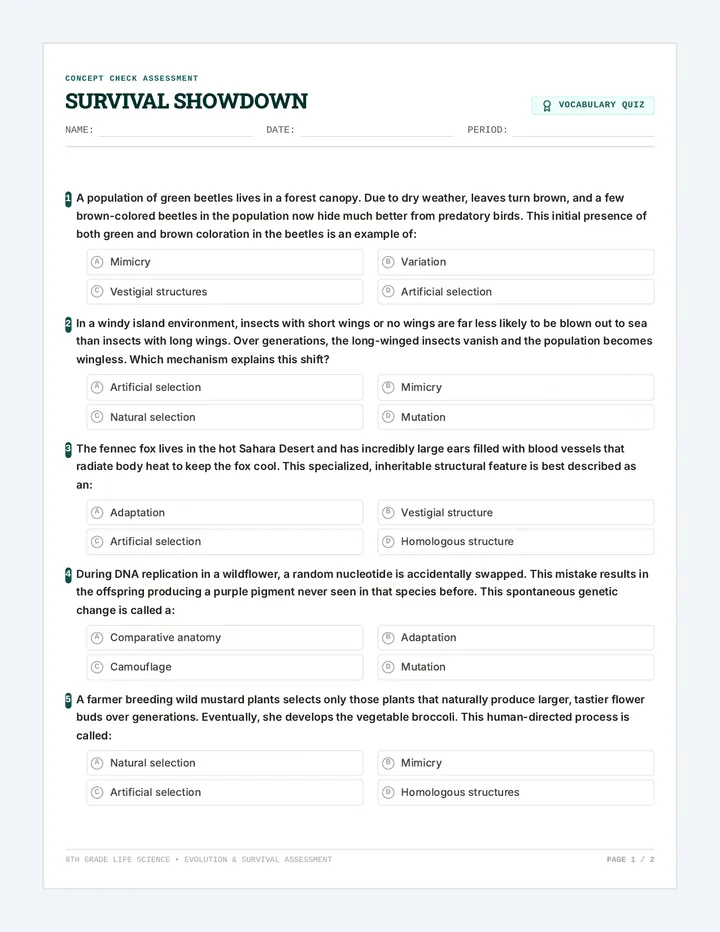
A 10-question application-based multiple-choice practice quiz for 8th-grade science students, testing their mastery of natural selection and evidence of evolution vocabulary under real-world scenarios.