This lesson introduces the Denavit-Hartenberg convention for standardizing link attachment frames. Students systematically derive the forward kinematics equations for a 3-link planar arm and a 6-DOF industrial manipulator.
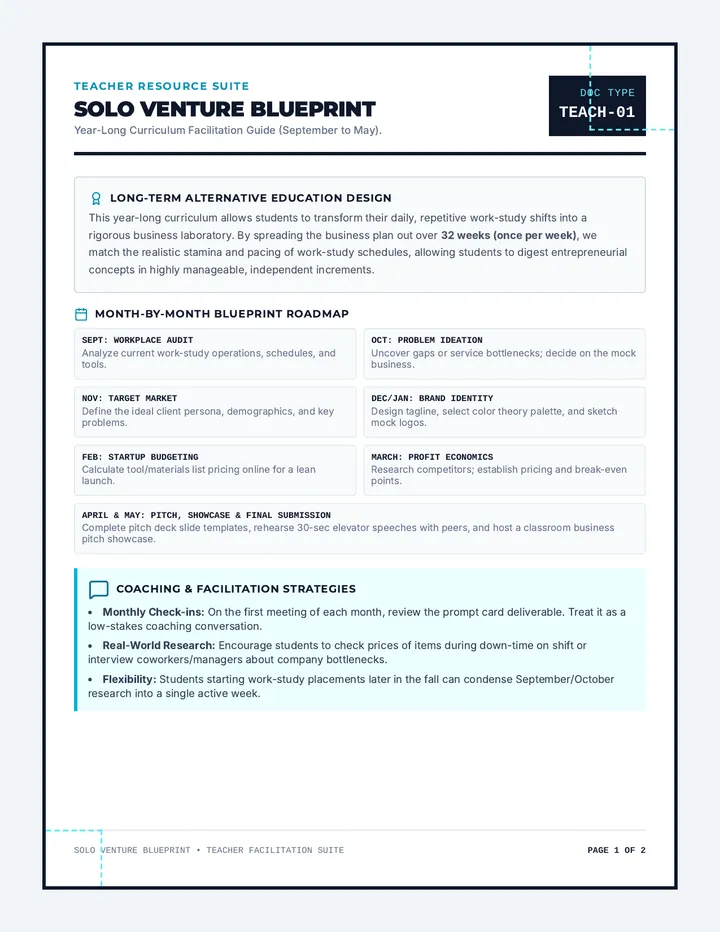
A year-long, self-paced entrepreneurship curriculum spanning September to May for alternative education students in work-study placements. Students transform real-world work experience into a modular business plan and slide presentation.
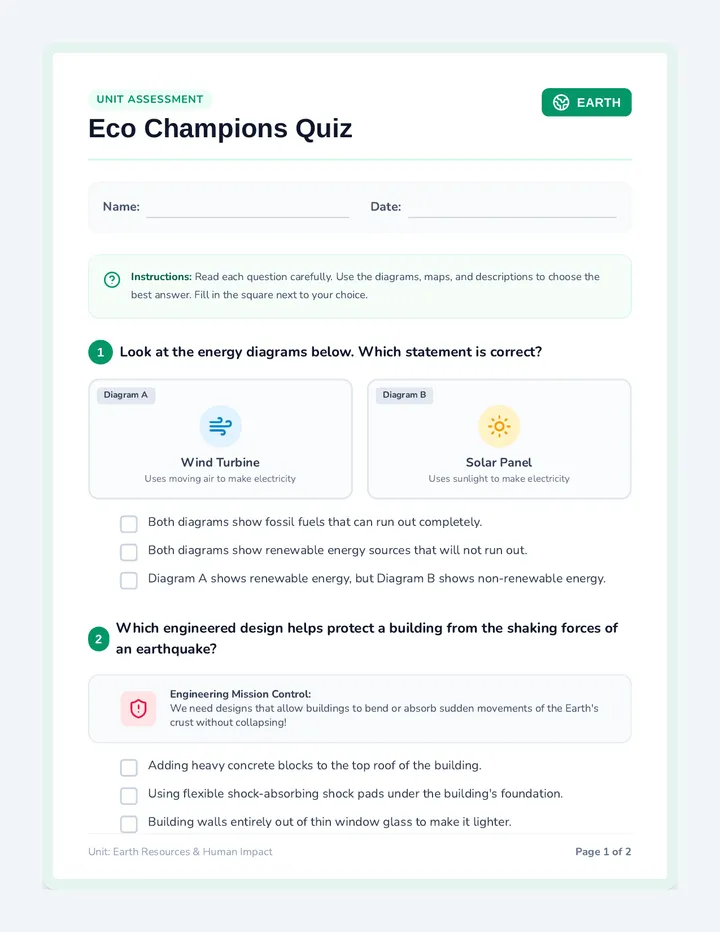
An elementary Earth Science lesson focusing on renewable energy, natural hazards, conservation, and human impact. Includes a highly visual student quiz and a corresponding teacher answer key.
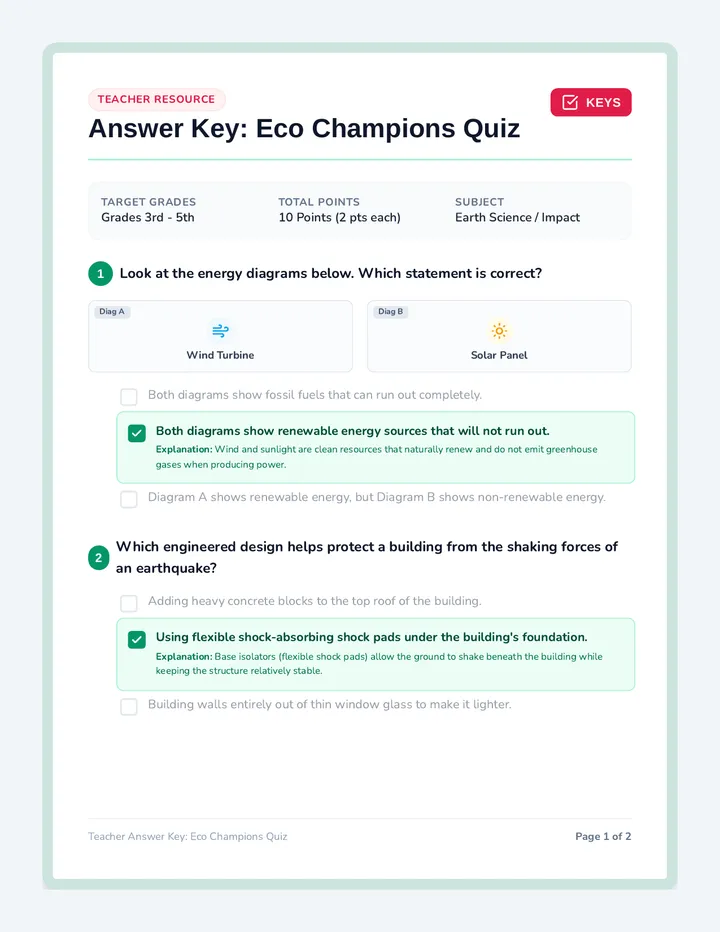
A teacher-facing 2-page Answer Key for the Eco Champions Quiz, providing highlighted correct answers, explanations, and grading criteria for the open-ended action plan question.
A cross-curricular, 3-day project-based unit combining science, argumentative writing, and graphic design. Students investigate the ecological impacts of light pollution, write a data-driven persuasive proposal, and design a community awareness campaign poster.
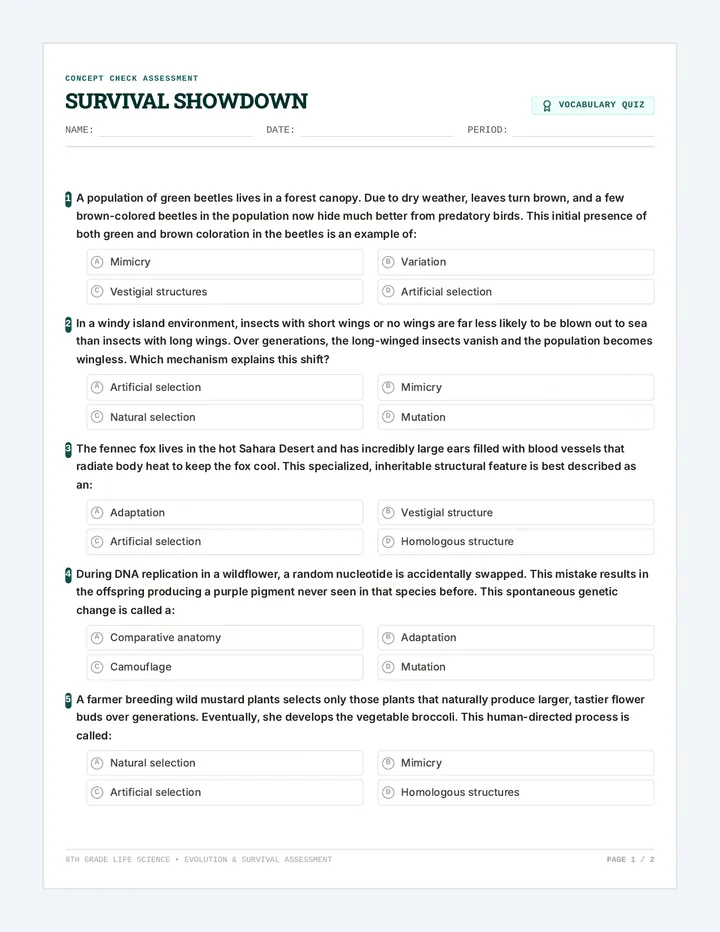
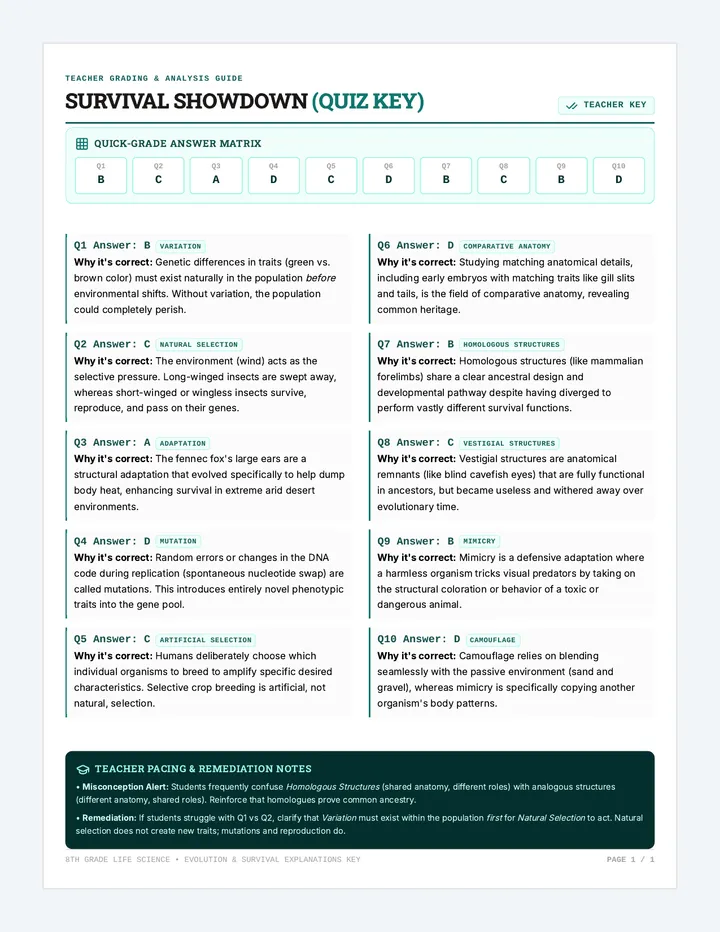
An active-recall study unit on natural selection and evolutionary evidence, featuring graphic organizers, application activities, and a practice quiz.
A visually engaging, 2-page Earth Science quiz designed for grades 3-5, focusing on renewable energy, natural hazards, conservation, and climate change with clean diagram boxes and student writing space.
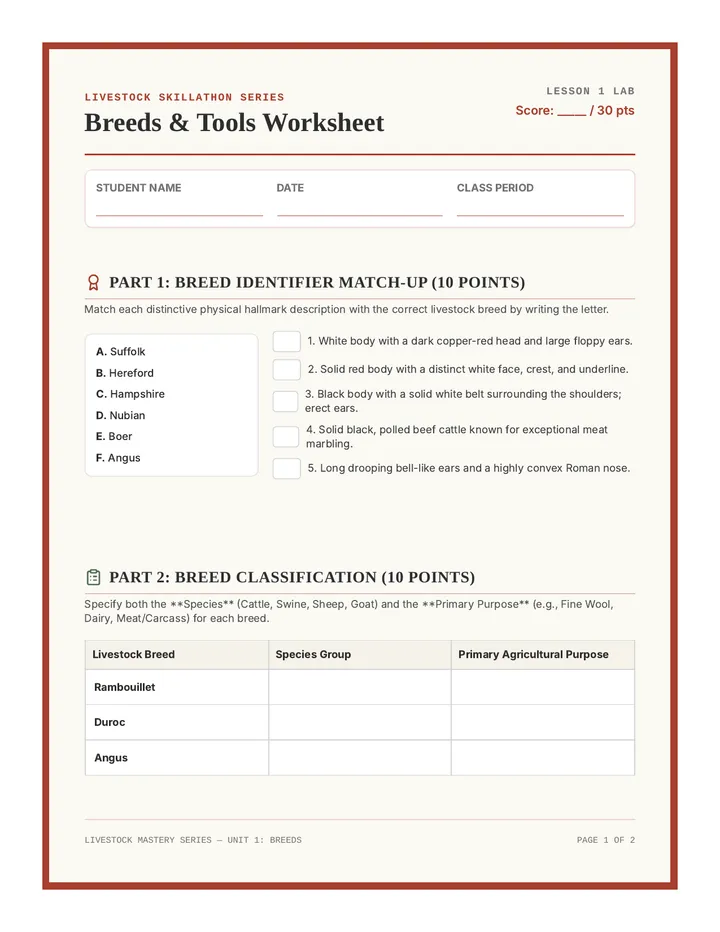
An immersive preparation program that equips agriculture students with the hands-on identification and evaluation skills needed to conquer competitive Livestock Skillathon contests.
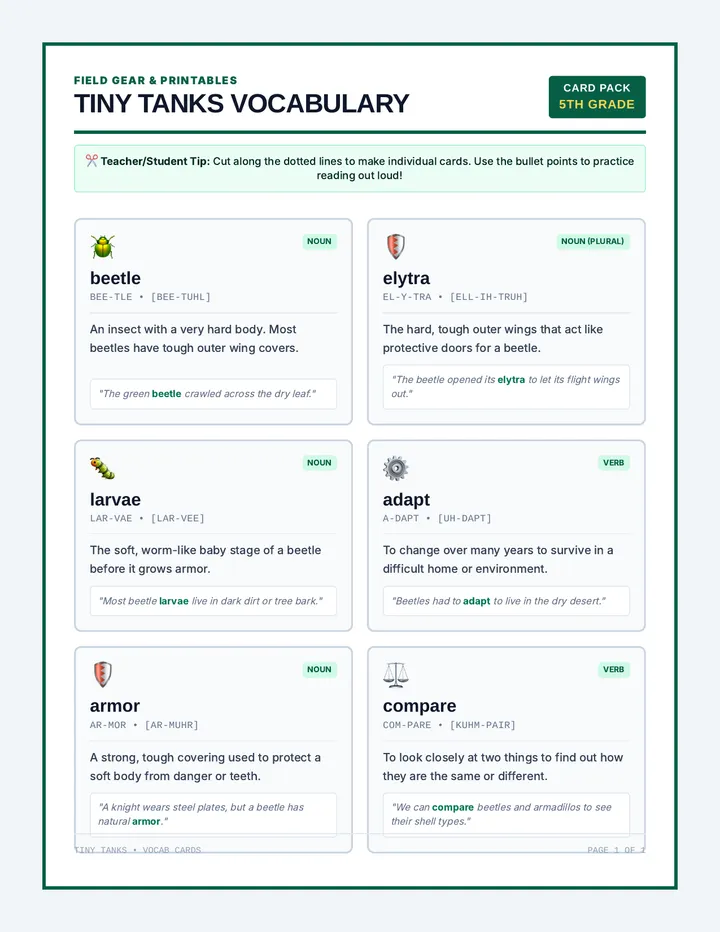
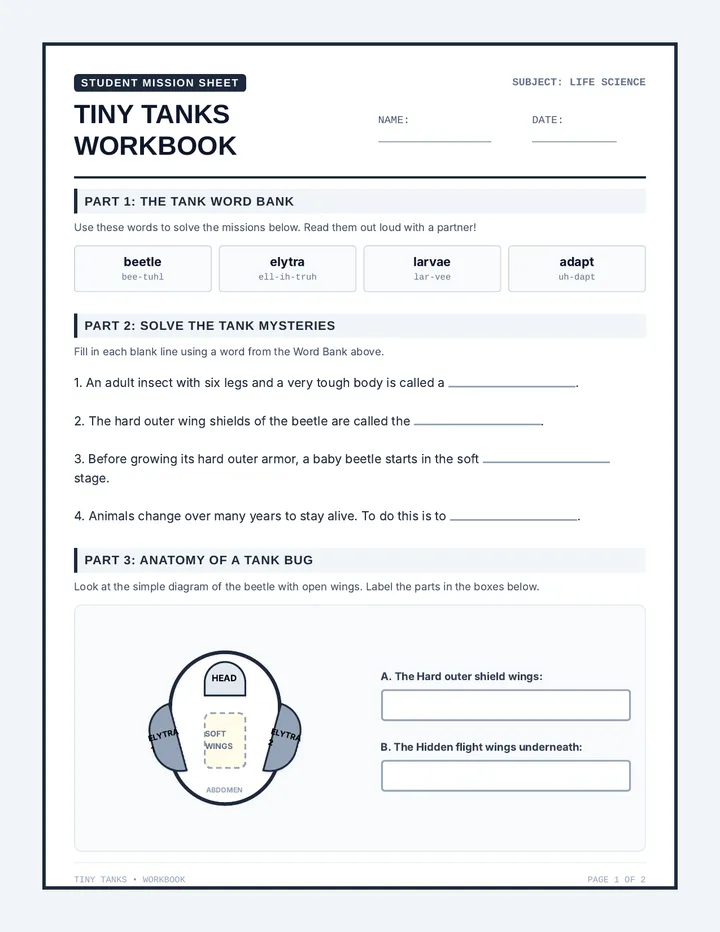
An engaging, highly visual science lesson exploring beetles as the armored tanks of the insect world, designed specifically for fifth-grade students reading below grade level. Students learn about elytra, beetle adaptation, and compare insect armor to that of the armadillo through scaffolded activities.
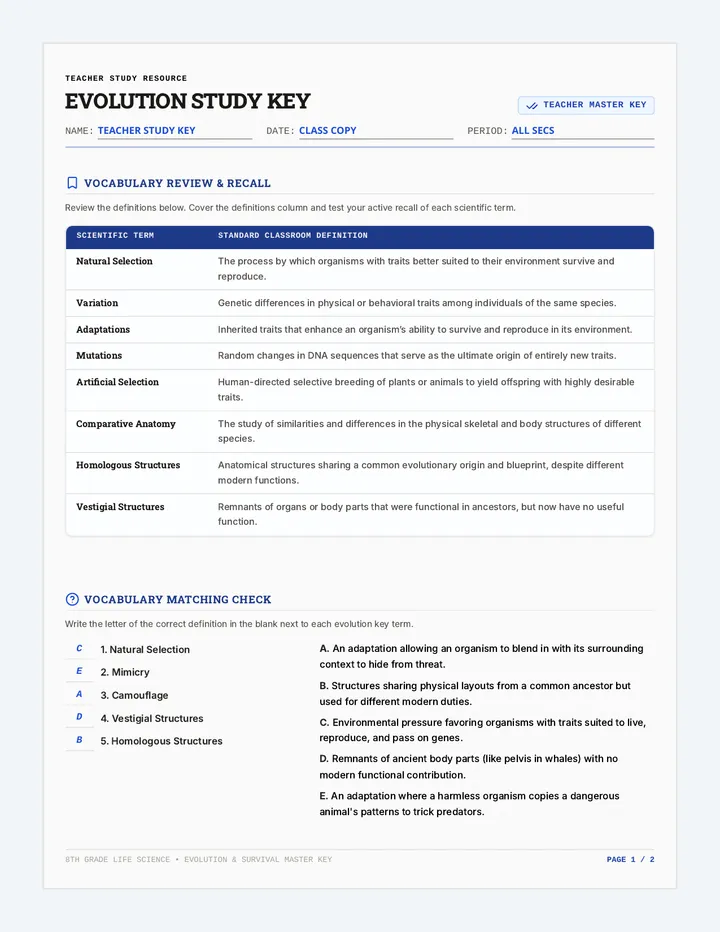
Complete teacher answer key for the Evolution Study Guide, containing completed vocabulary matching and high-quality exemplar written responses styled in blue ink.
A comprehensive unit on rainforest ecology, climate regulation, and conservation. Students explore the structural layers of the rainforest, their roles as carbon sinks, the threats of deforestation, and collaborative solutions for preservation.
A lesson focused on the physics of hitting a home run in baseball. Students explore cause-and-effect relationships and vocabulary context clues through a reading passage, followed by comprehension questions and a creative writing prompt.
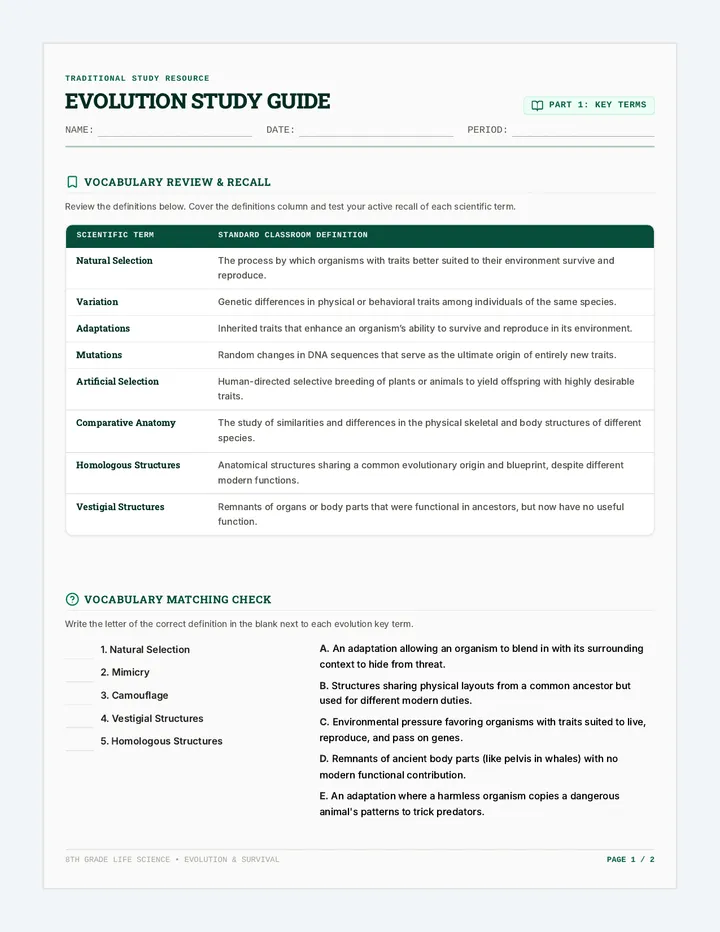
A traditional 2-page print-ready study guide for 8th-grade science, featuring direct definitions, structured vocabulary matching, and four scenario-based short-answer practice questions.