Students apply homogeneous transformation matrices to calculate the position and orientation of a robot's end-effector based on given joint angles. They work through 2D examples before moving to 3D.
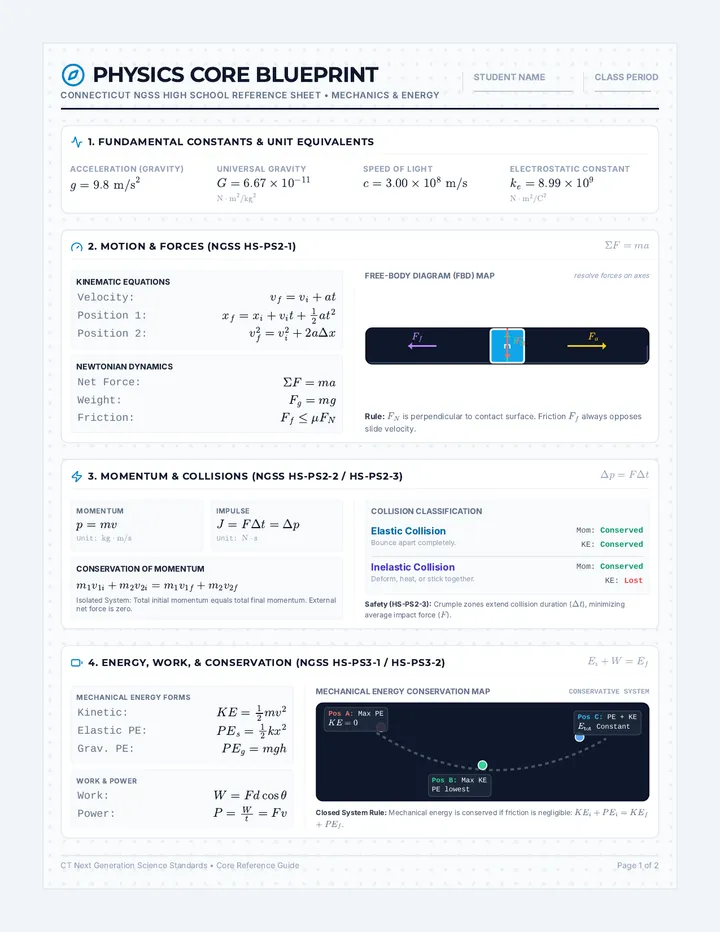
A comprehensive high school physics curriculum sequence aligned with the Connecticut Next Generation Science Standards (CT-NGSS), focusing on core concepts, quantitative problem-solving, and visual models.
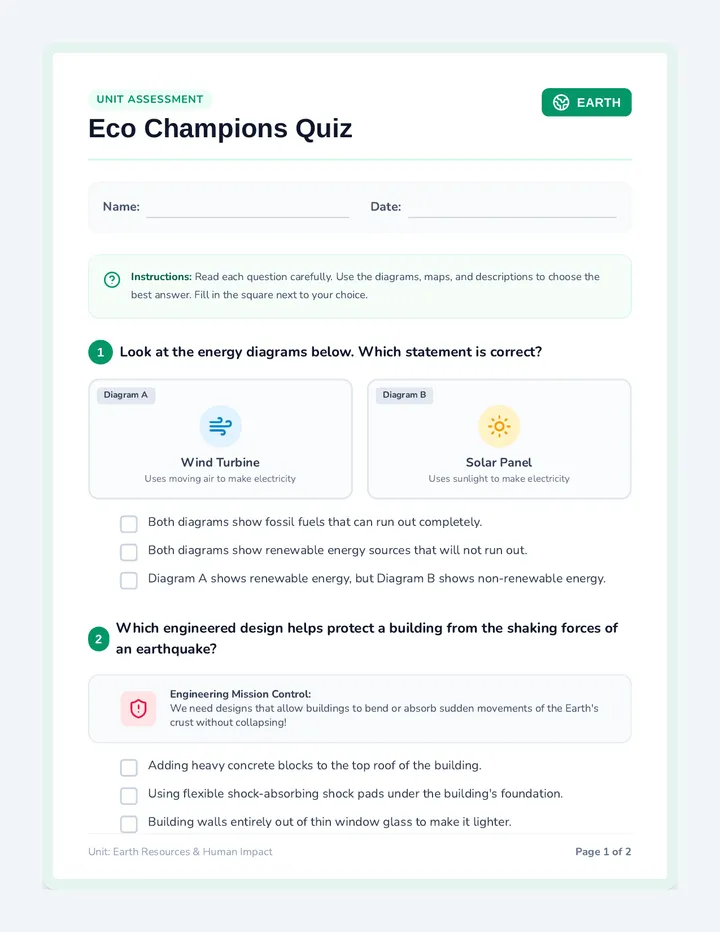
An elementary Earth Science lesson focusing on renewable energy, natural hazards, conservation, and human impact. Includes a highly visual student quiz and a corresponding teacher answer key.
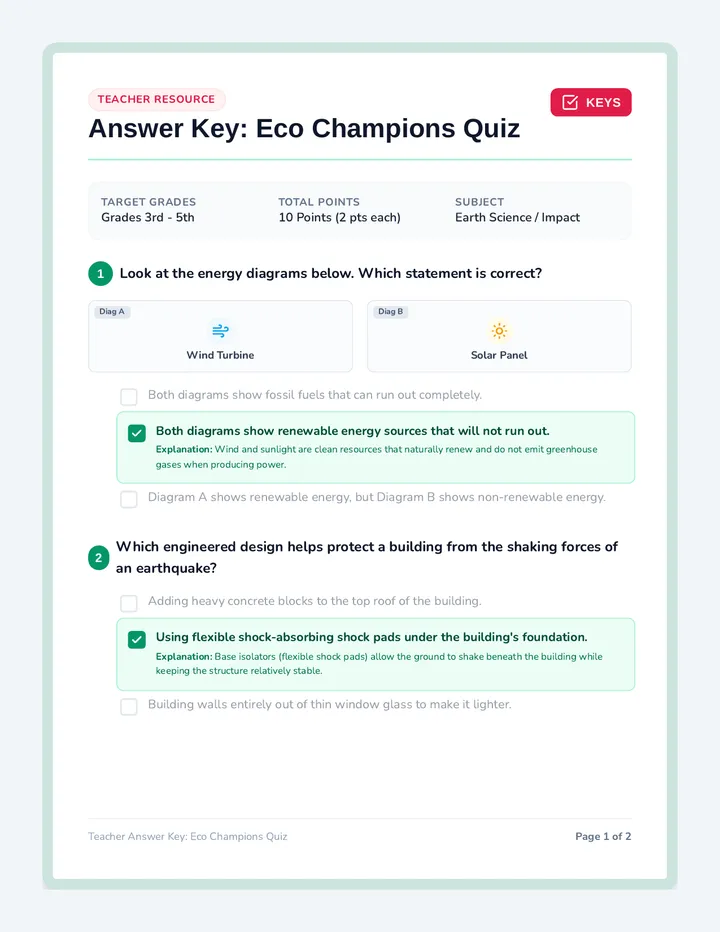
A teacher-facing 2-page Answer Key for the Eco Champions Quiz, providing highlighted correct answers, explanations, and grading criteria for the open-ended action plan question.
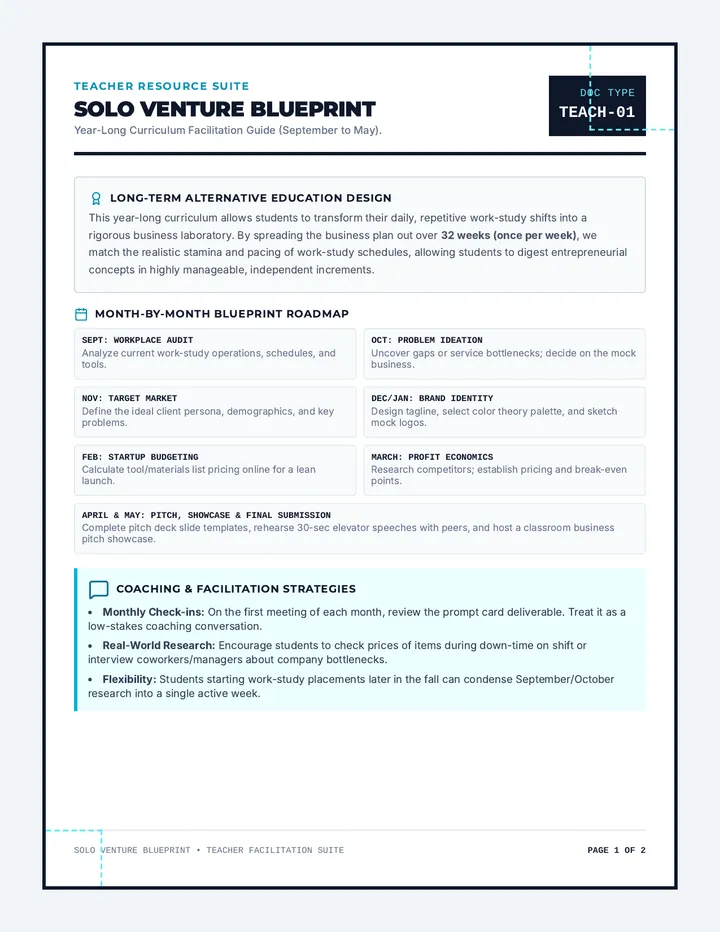
A year-long, self-paced entrepreneurship curriculum spanning September to May for alternative education students in work-study placements. Students transform real-world work experience into a modular business plan and slide presentation.
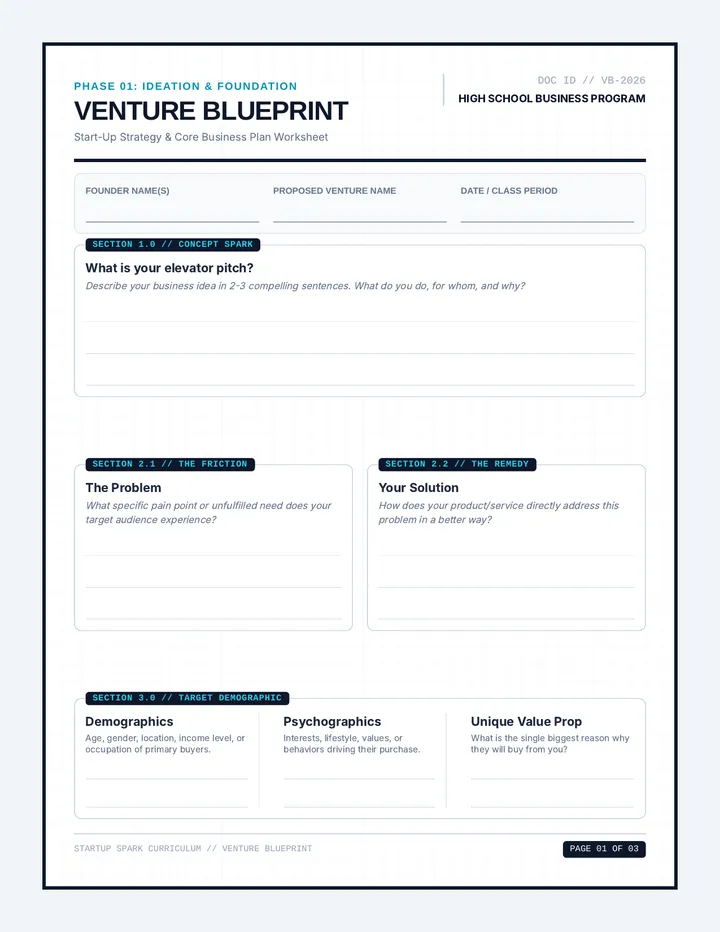
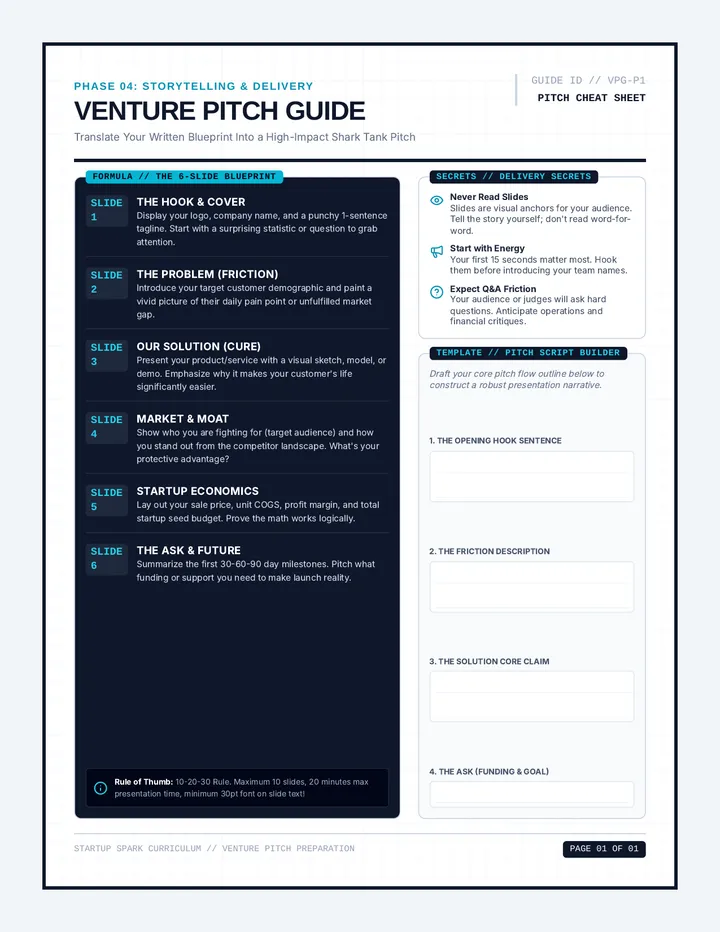
A comprehensive, step-by-step framework for high school students to design, structure, and refine a small business startup concept. Includes guided drafting templates, pacing checklists, and pitch preparation tools.
A visually engaging, 2-page Earth Science quiz designed for grades 3-5, focusing on renewable energy, natural hazards, conservation, and climate change with clean diagram boxes and student writing space.
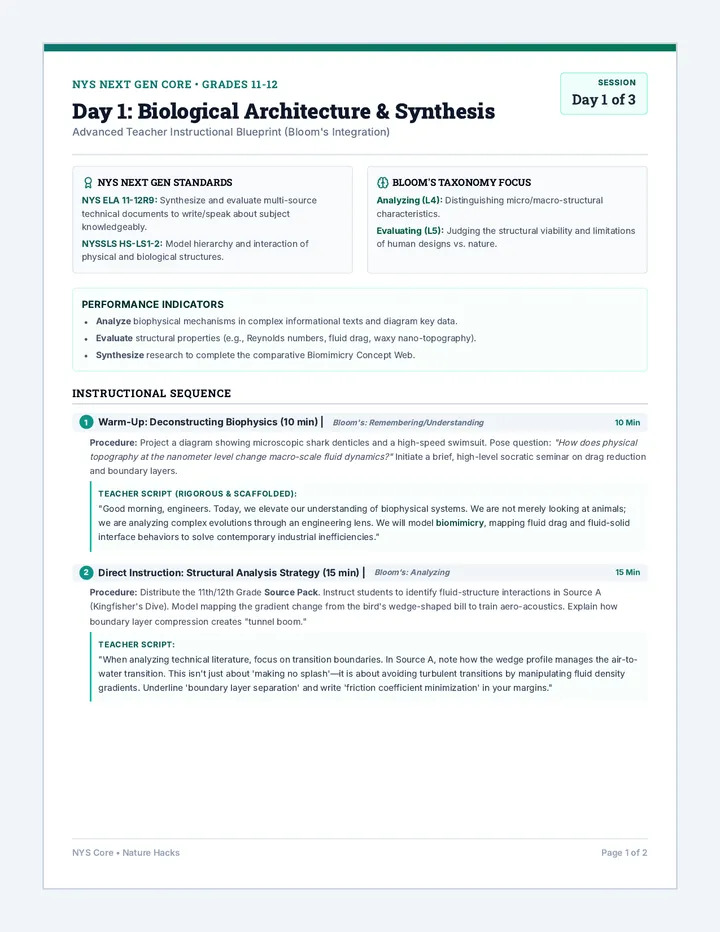
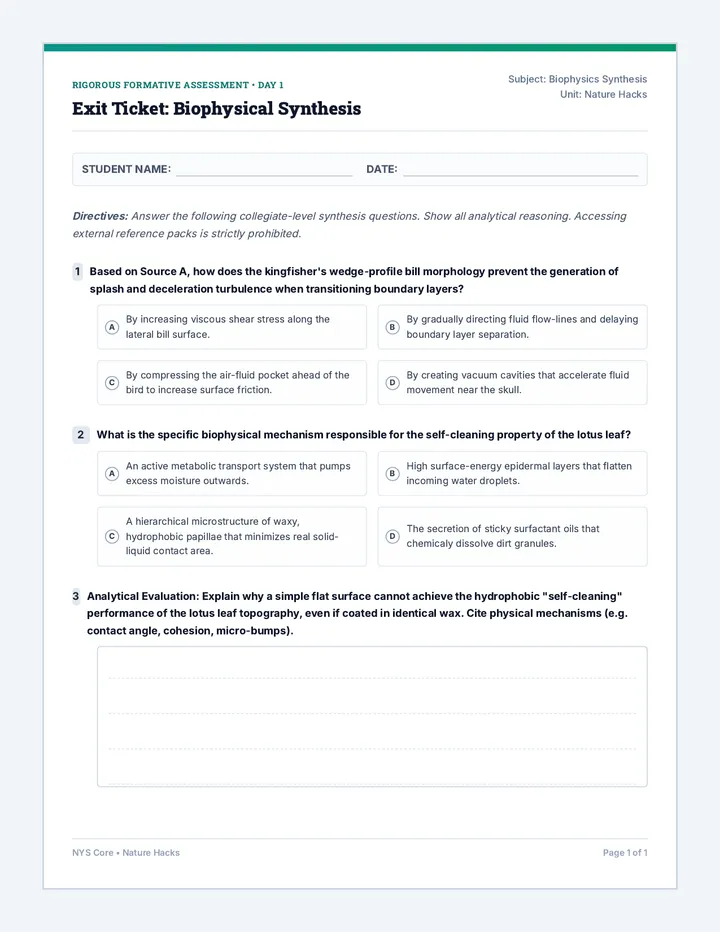
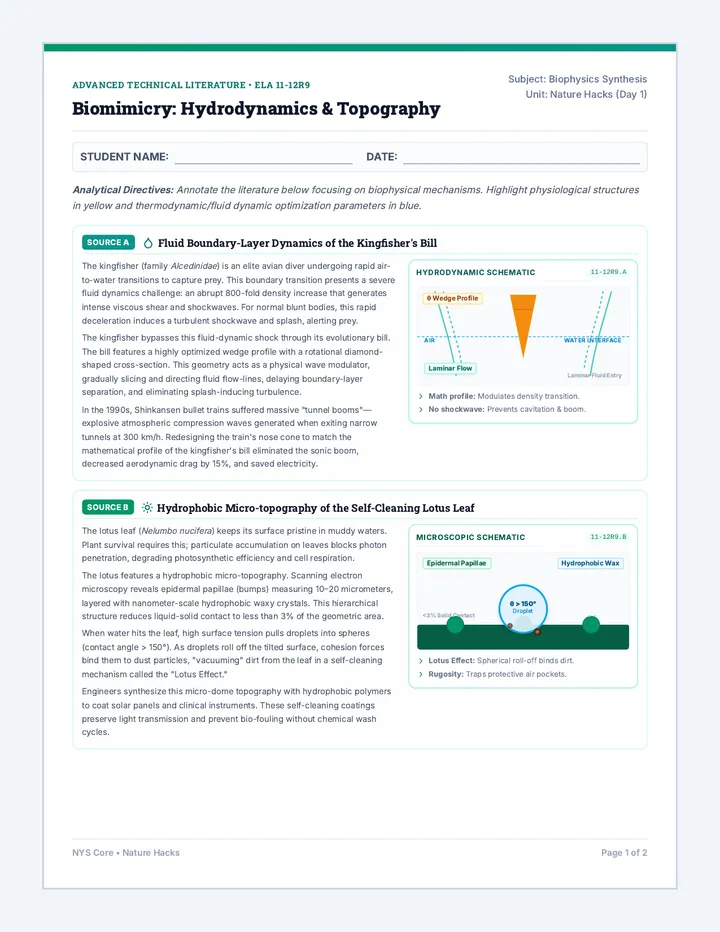
A 3-day cross-curricular STEAM unit where students research biological adaptations, design biomimetic engineering solutions, perform scale calculations, and write a synthesized informational article.
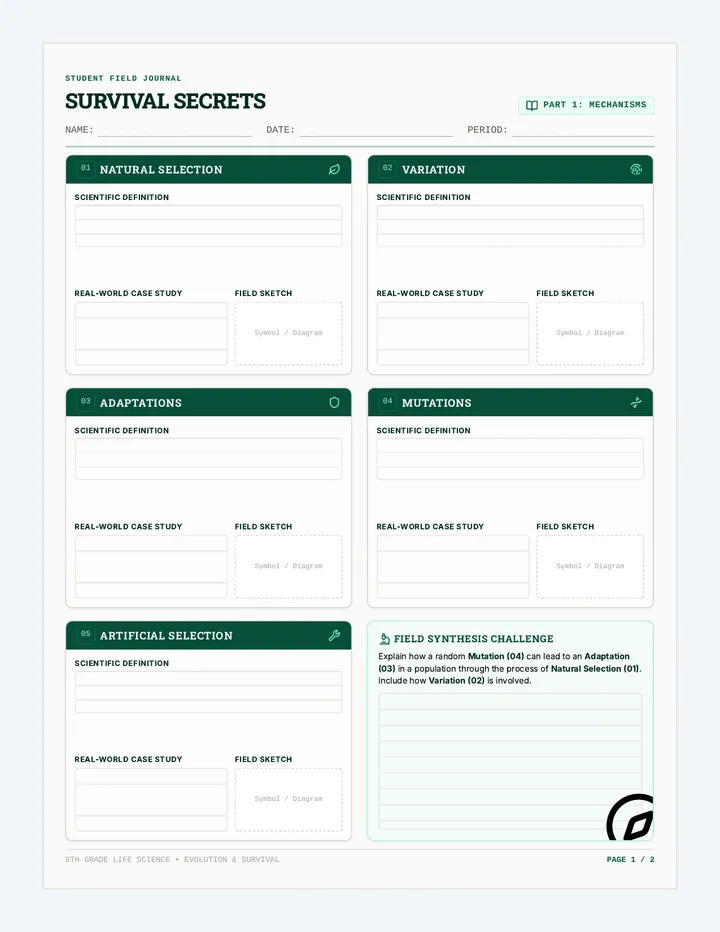
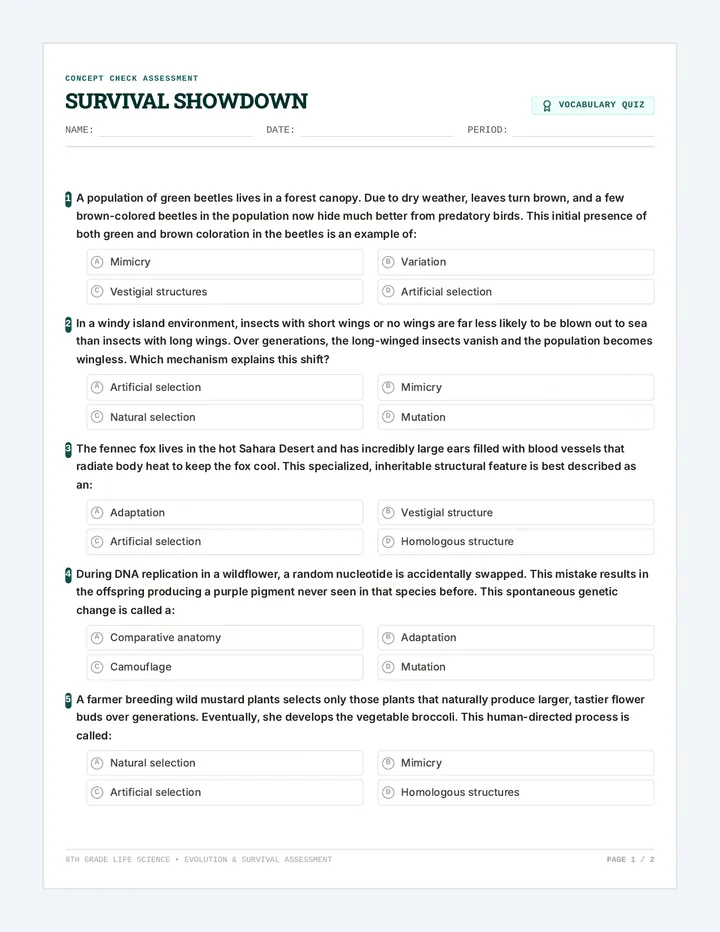
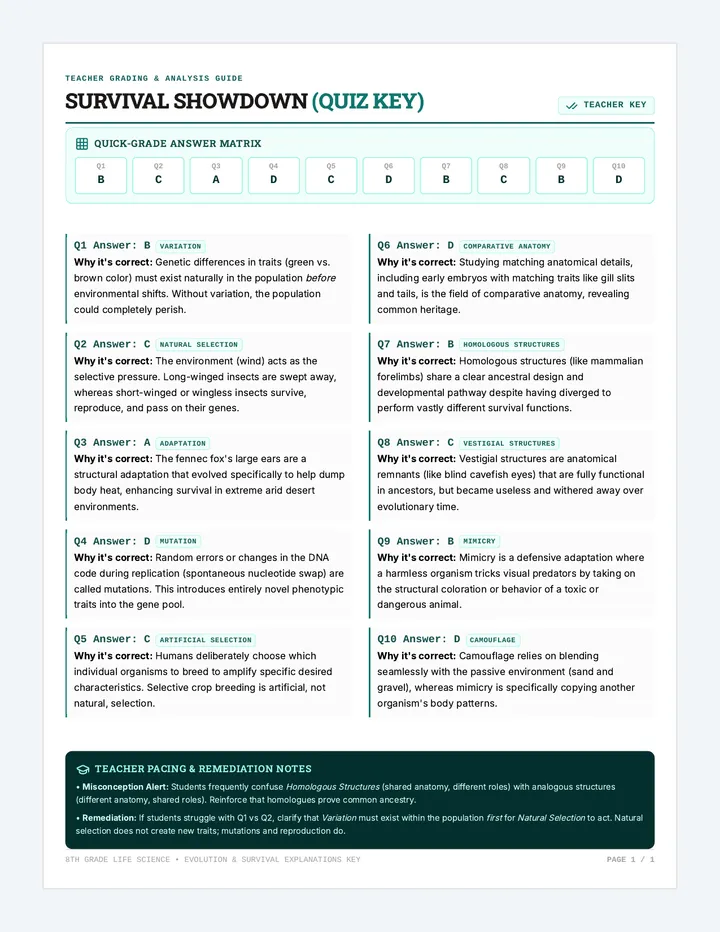
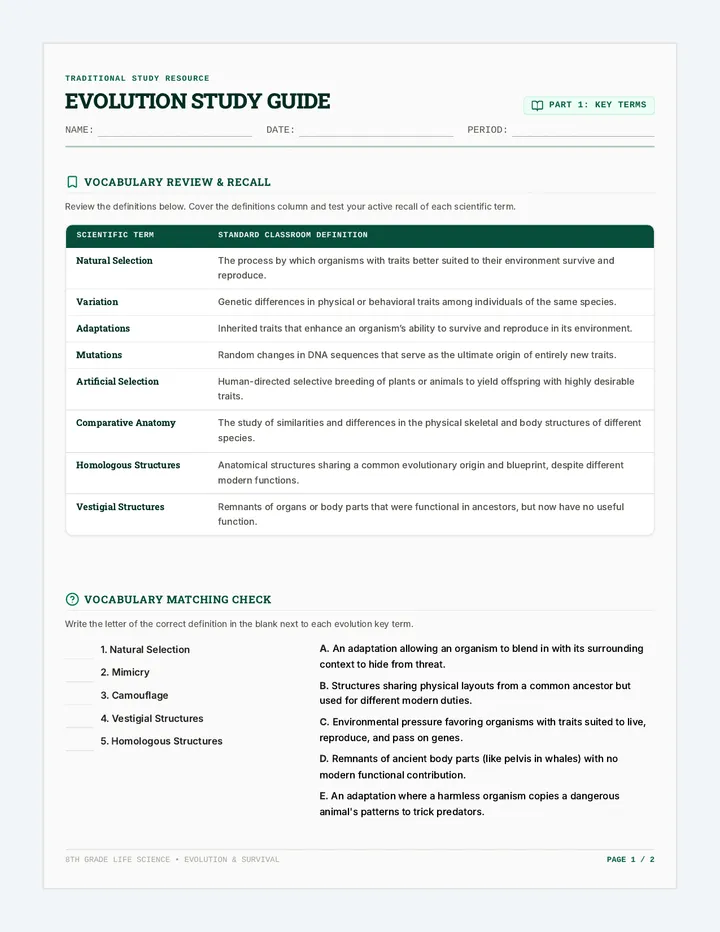
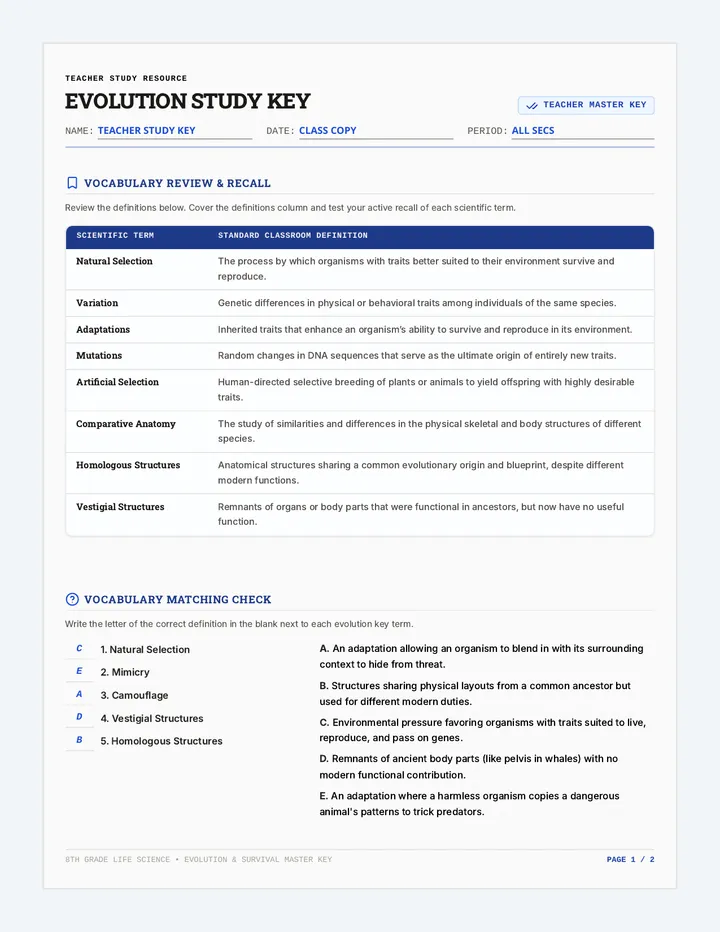
An active-recall study unit on natural selection and evolutionary evidence, featuring graphic organizers, application activities, and a practice quiz.
A student-facing companion reference and cheat sheet for building a 3-minute business pitch presentation. This single-page blueprint features a slide-by-slide content guide, executive delivery secrets, and an interactive presentation script builder.
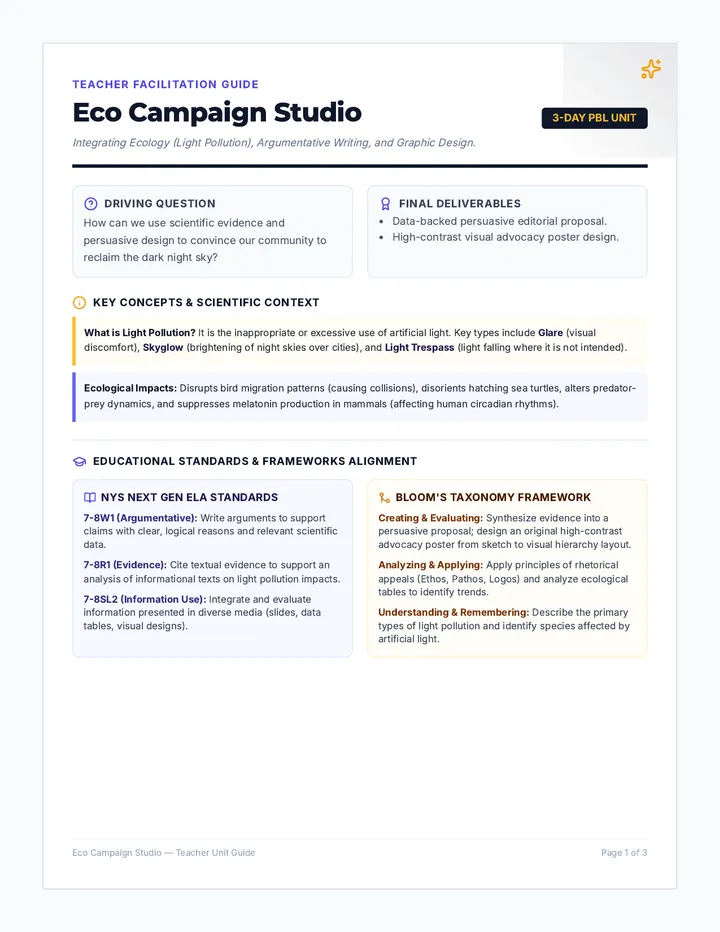
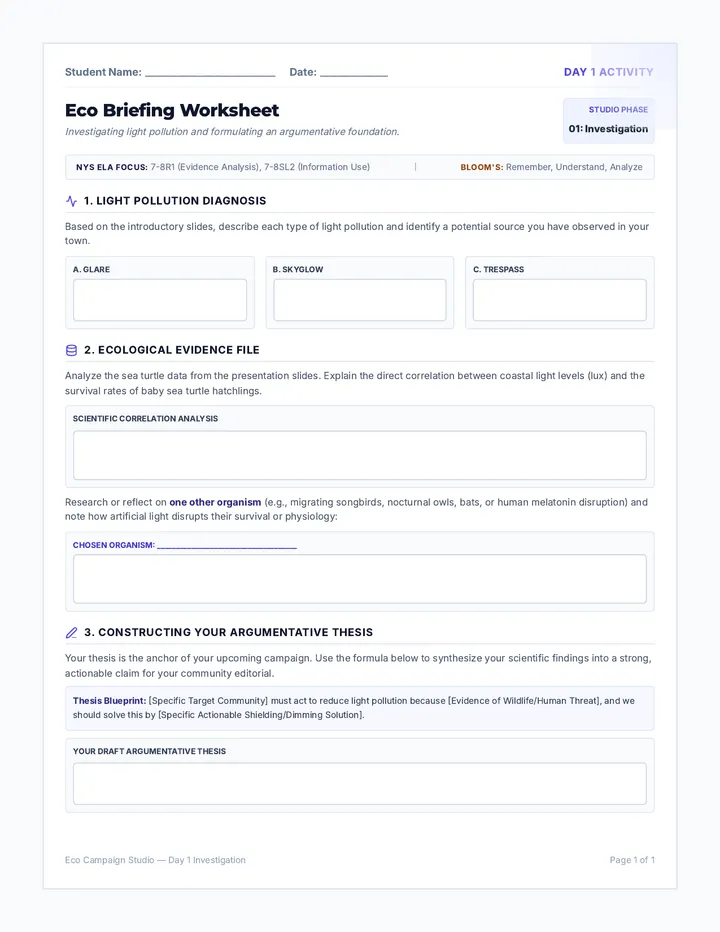
A cross-curricular, 3-day project-based unit combining science, argumentative writing, and graphic design. Students investigate the ecological impacts of light pollution, write a data-driven persuasive proposal, and design a community awareness campaign poster.
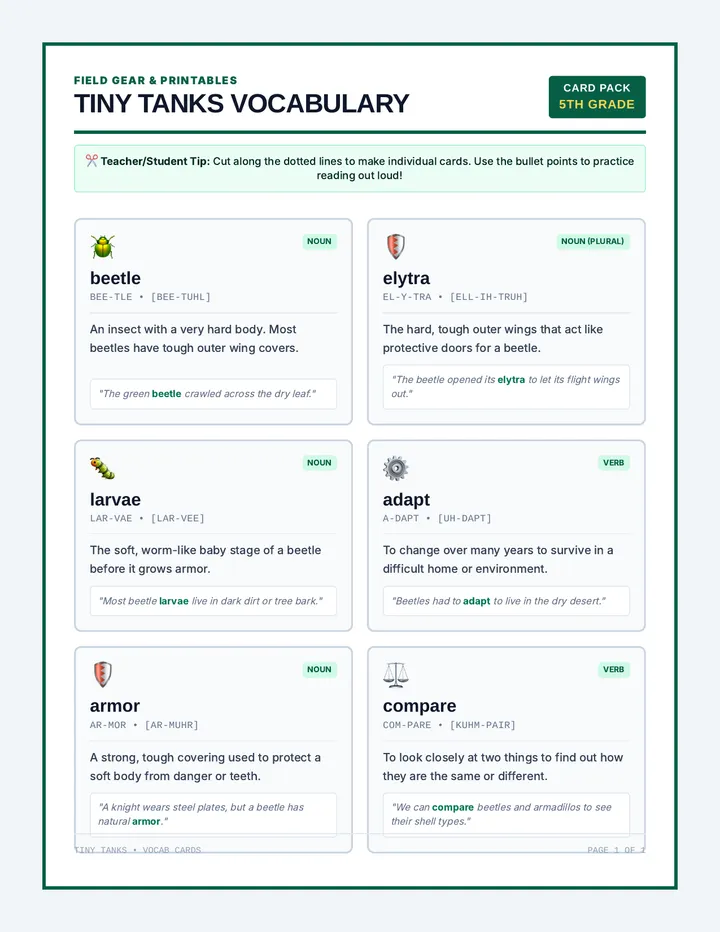
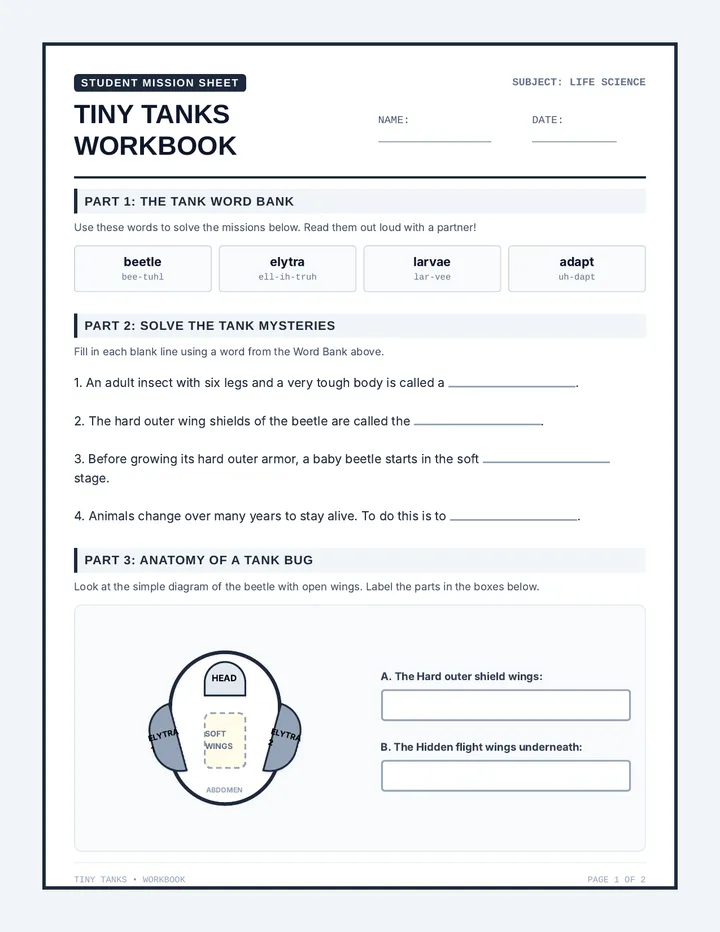
An engaging, highly visual science lesson exploring beetles as the armored tanks of the insect world, designed specifically for fifth-grade students reading below grade level. Students learn about elytra, beetle adaptation, and compare insect armor to that of the armadillo through scaffolded activities.
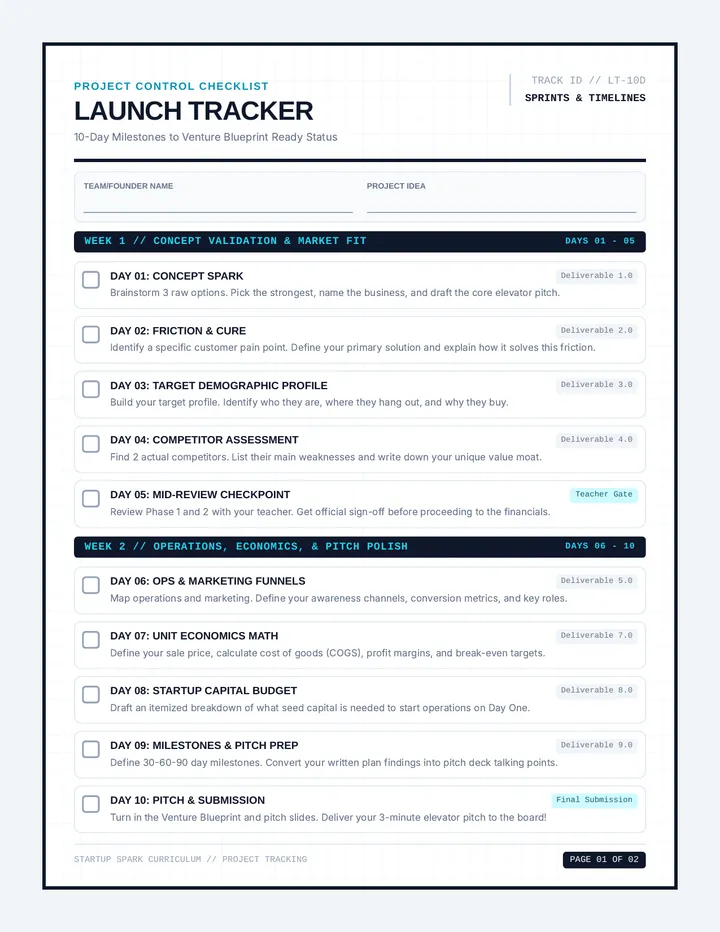
A student-facing daily pacing planner and a detailed teacher grading rubric. Styled with a professional project-tracking timeline grid, this 2-page document includes a 10-day sprint checklist and an analytical 100-point rubric matrix.