Moving from position to velocity, students derive the Jacobian matrix to relate joint velocities to end-effector linear and angular velocities. They explore singularities where the robot loses a degree of freedom.
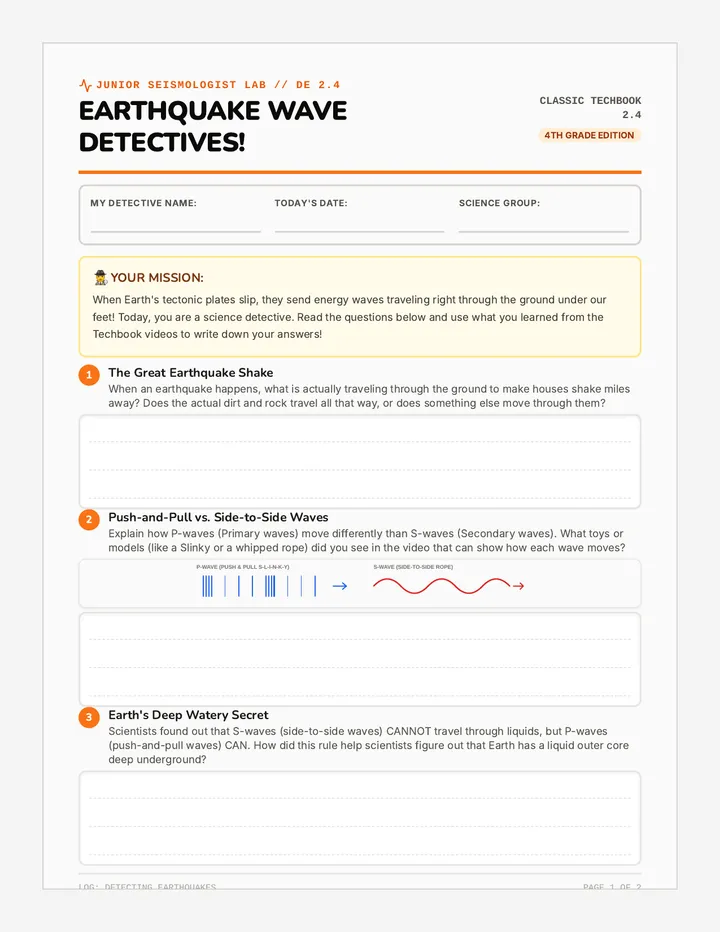
An earth and space science curriculum unit covering dynamic earth processes, earthquake wave mechanics, atmospheric pressure systems, and weather prediction techniques.
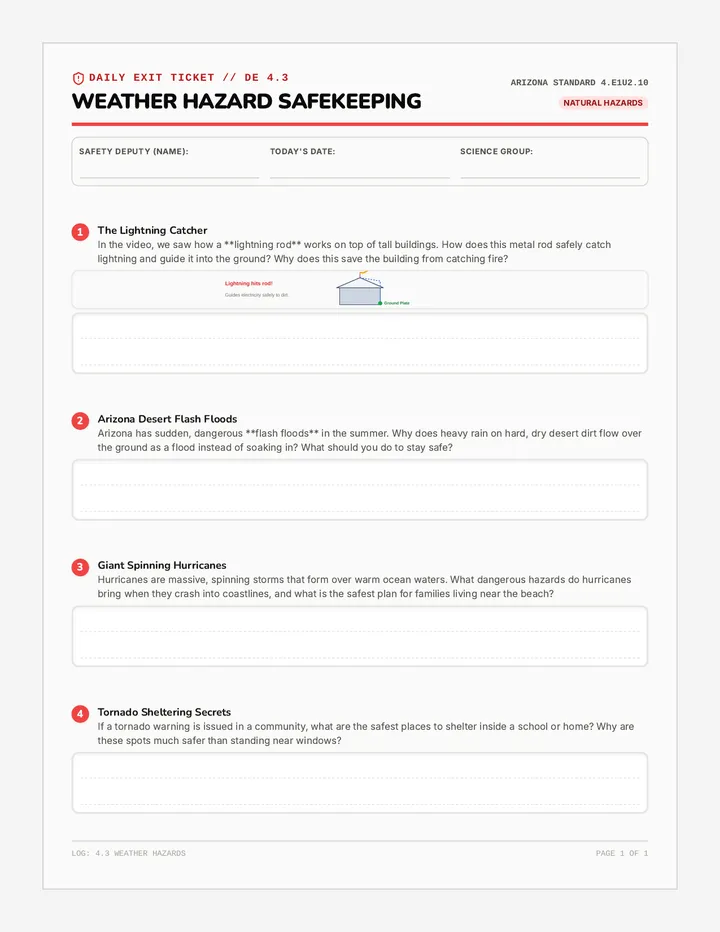
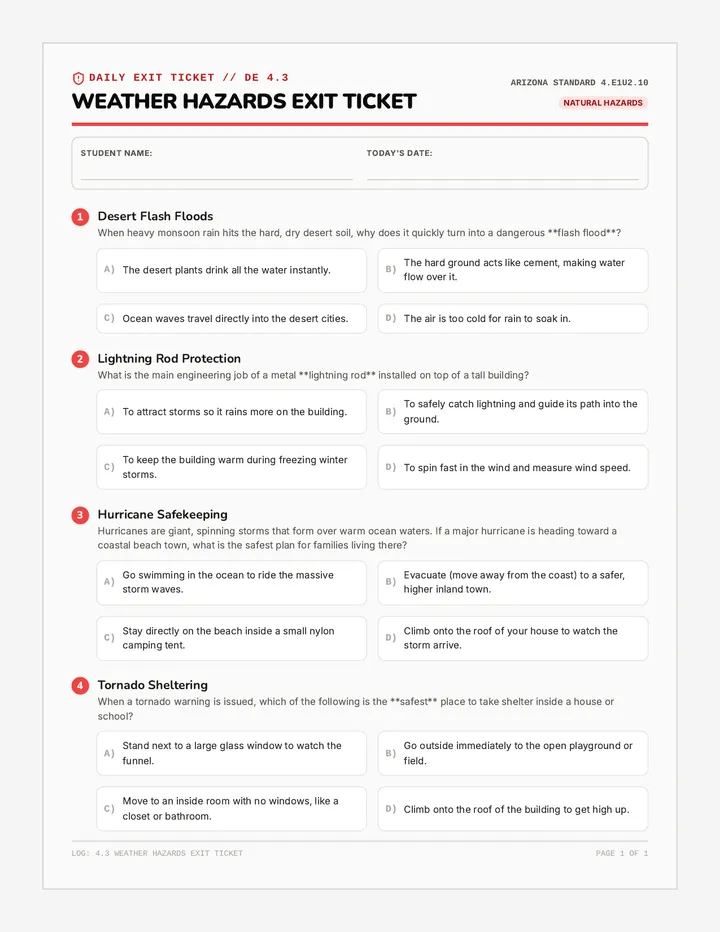
Students identify different types of severe weather hazards (like lightning, tornadoes, flash floods, and dust storms) and explore engineering solutions designed to keep communities safe.
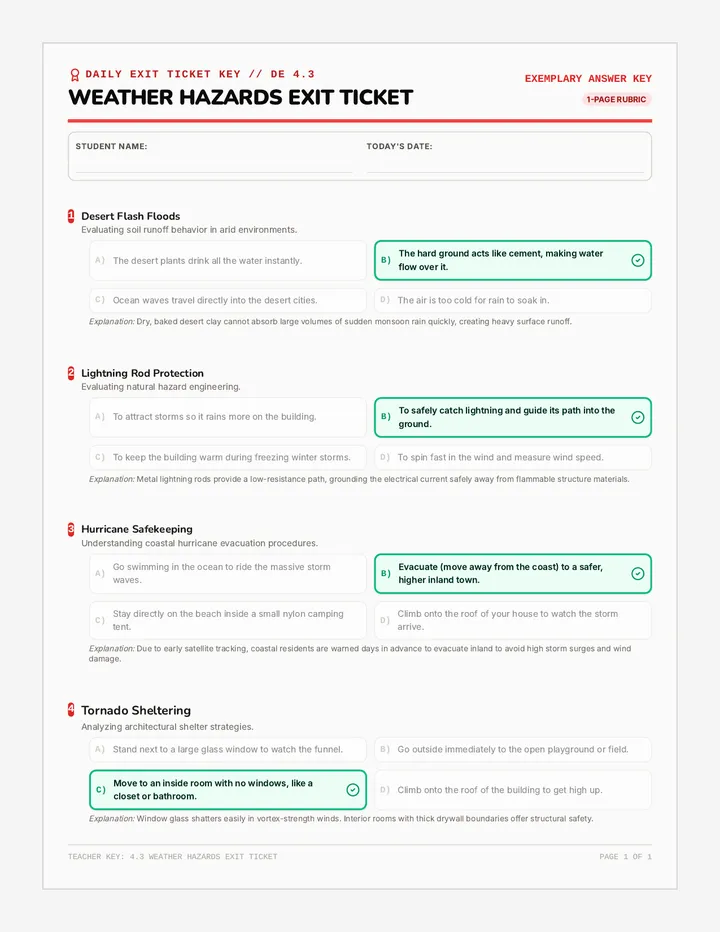
A comprehensive teacher answer key and scoring guide for the 4th-grade Weather Hazards Multiple Choice Quiz, clearly identifying correct choices and explanations.
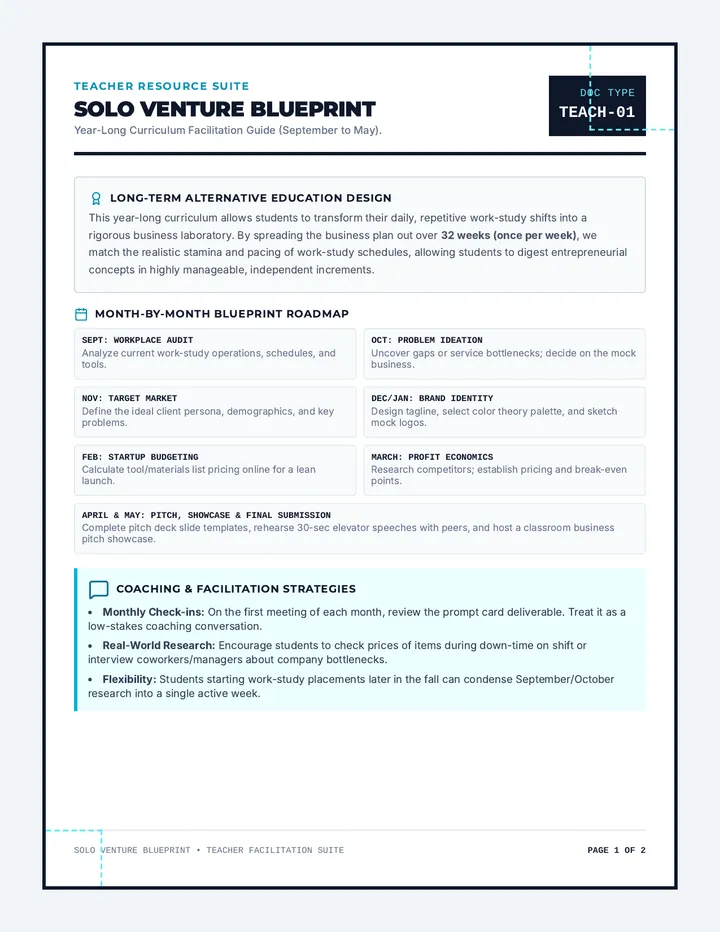
A year-long, self-paced entrepreneurship curriculum spanning September to May for alternative education students in work-study placements. Students transform real-world work experience into a modular business plan and slide presentation.
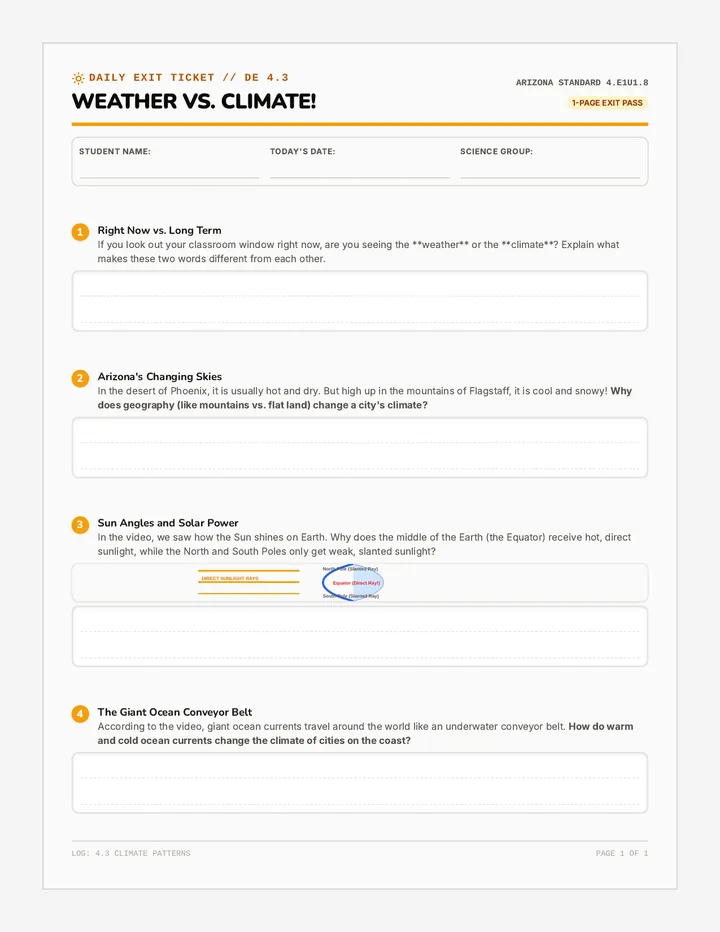
Students explore the key differences between weather and climate patterns, analyzing temperature, precipitation, and regional zones over time using global climate models.
A single-page 4th-grade student multiple choice worksheet featuring 4 conceptual questions on severe storm hazards, flash floods, hurricanes, and engineering protection, styled with identical options.
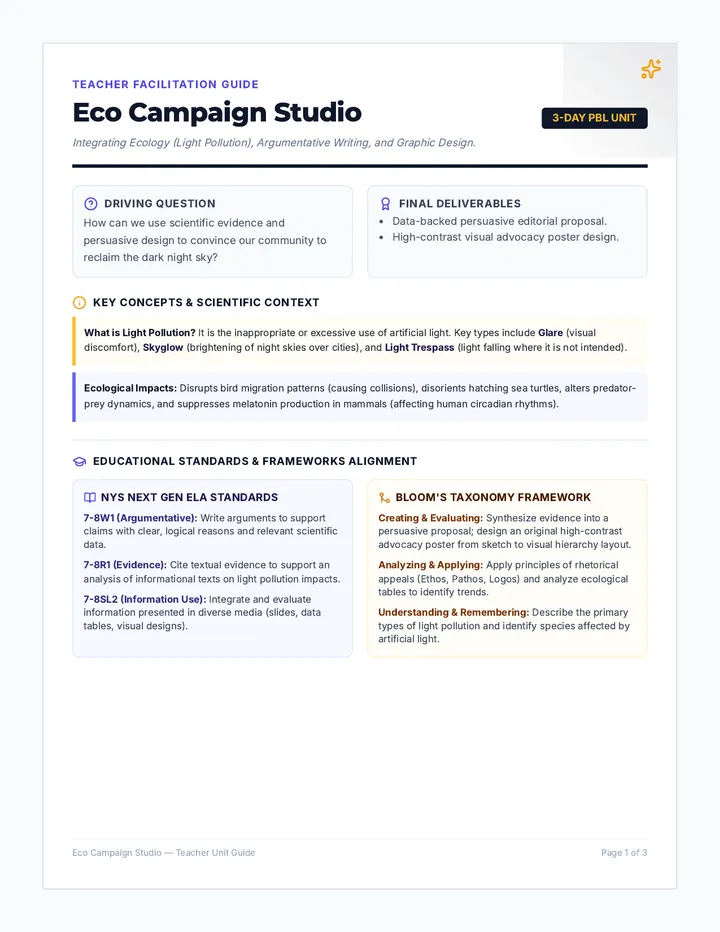
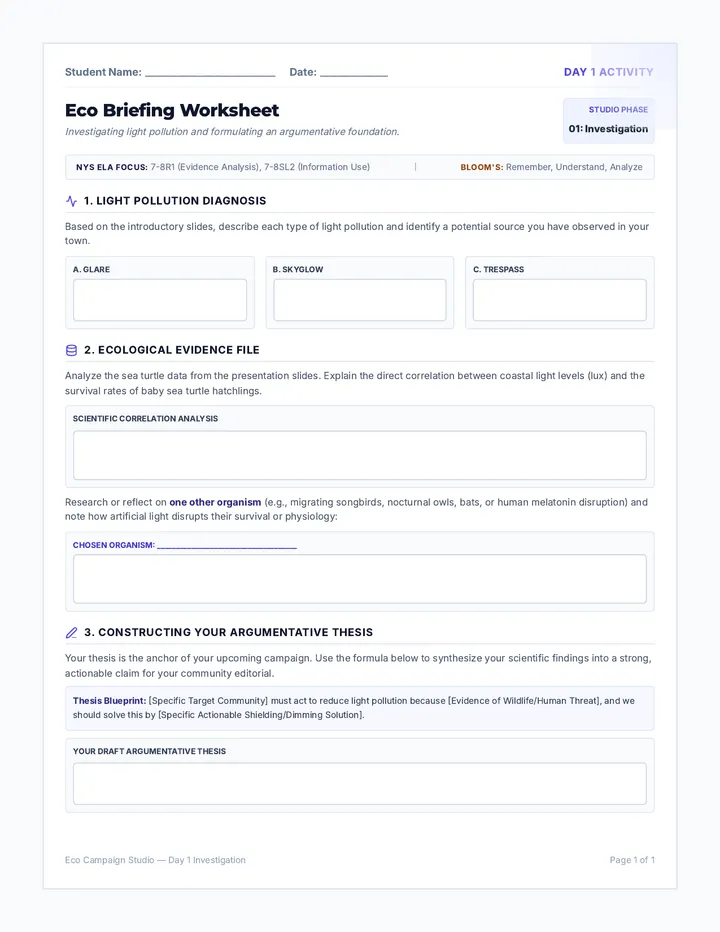
A cross-curricular, 3-day project-based unit combining science, argumentative writing, and graphic design. Students investigate the ecological impacts of light pollution, write a data-driven persuasive proposal, and design a community awareness campaign poster.
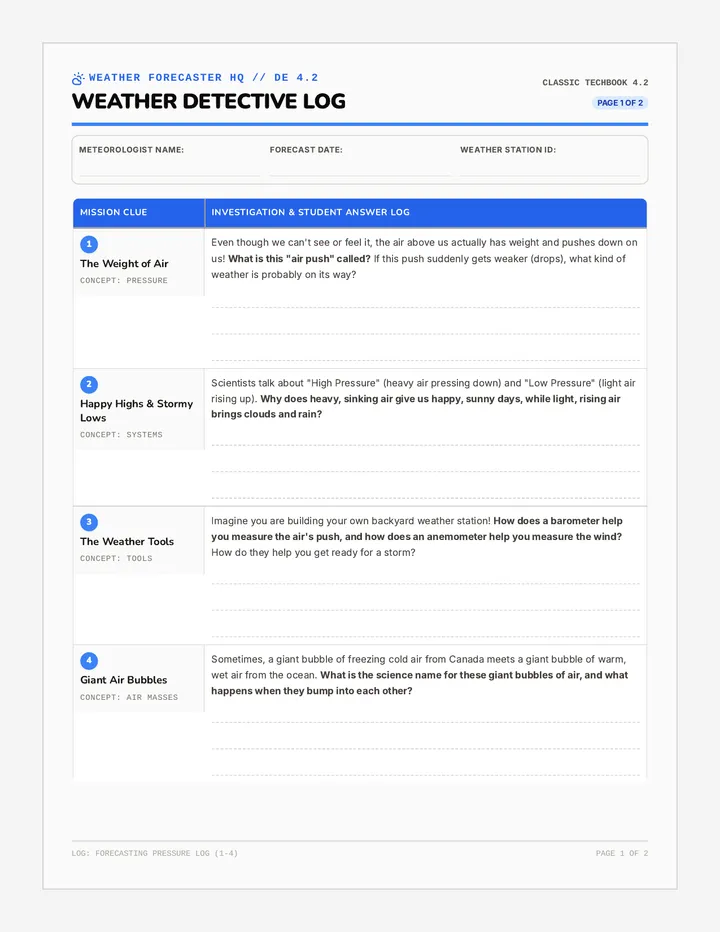
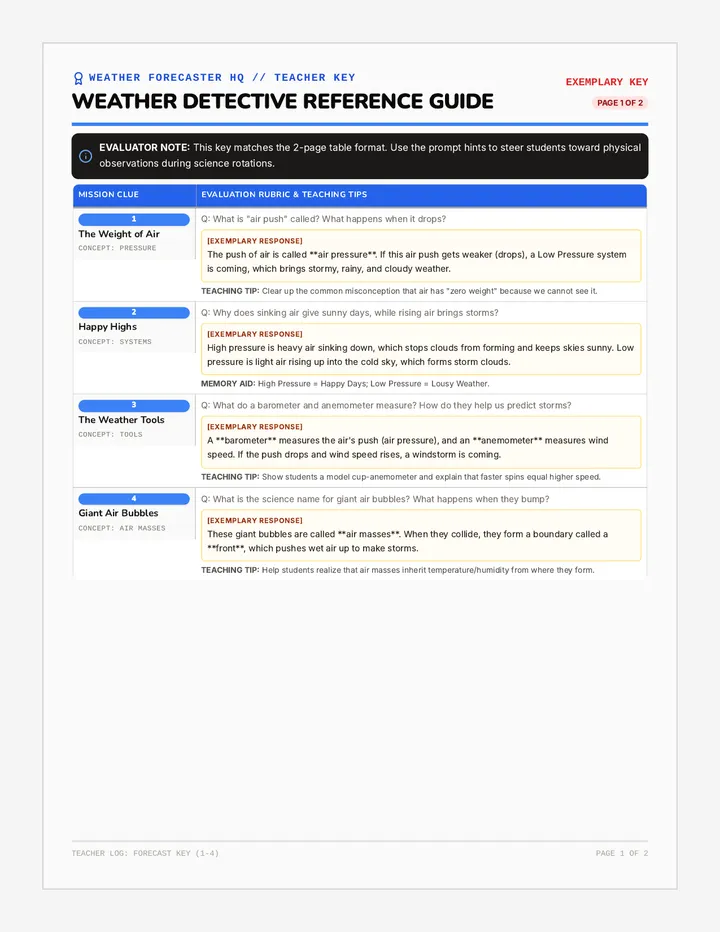
This lesson covers weather prediction techniques, atmospheric pressure systems, warm and cold fronts, and how meteorologists analyze satellite and radar data to forecast storms.
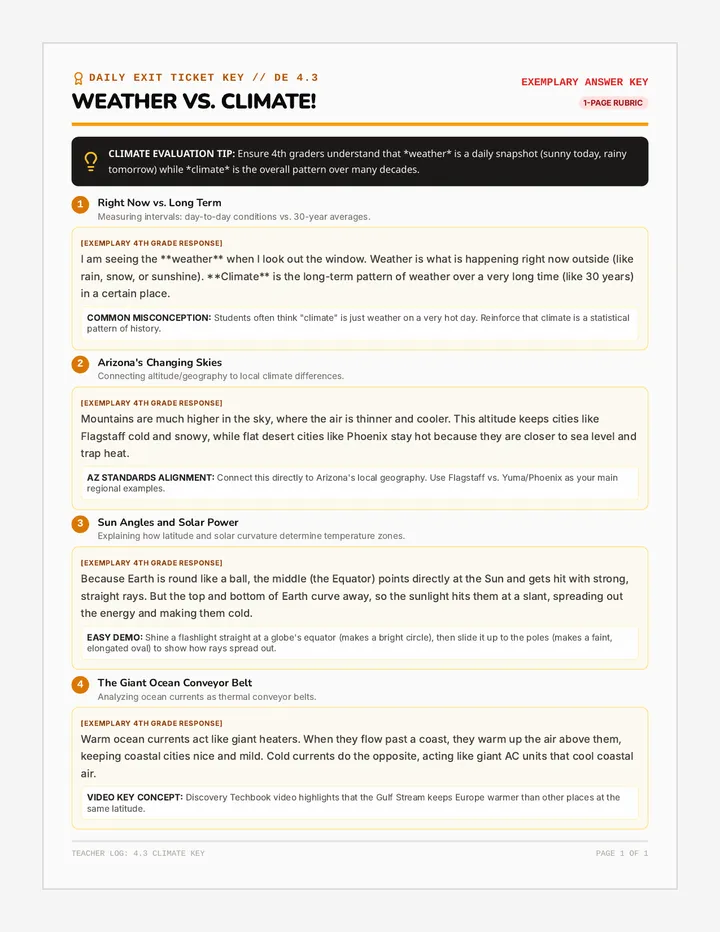
A comprehensive teacher answer key and evaluation guide for the 4th-grade Weather Hazards Exit Ticket, featuring model answers and common misconceptions.
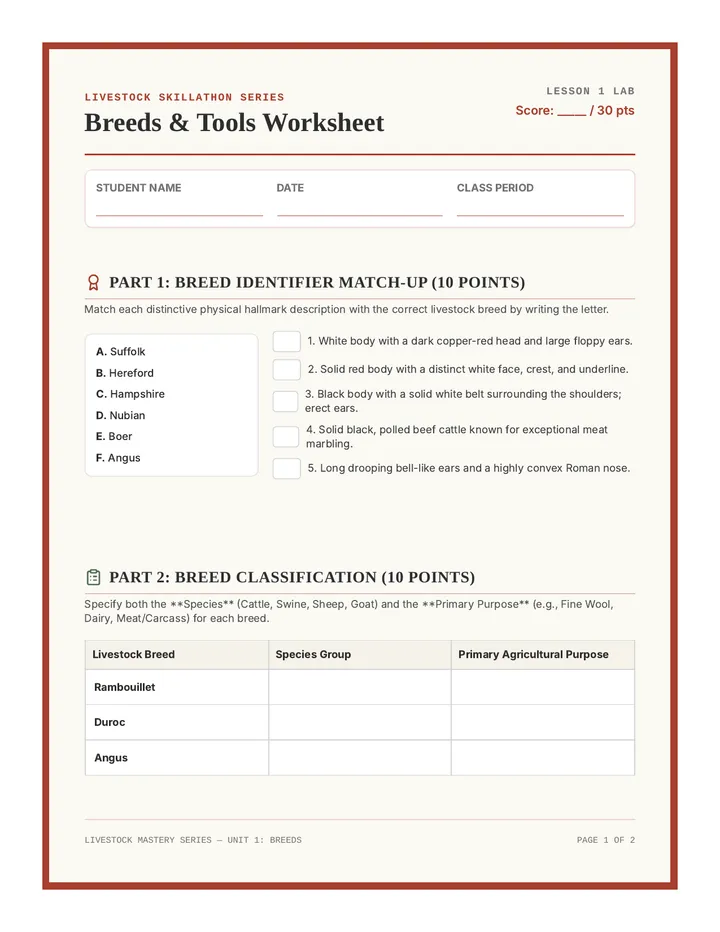
An immersive preparation program that equips agriculture students with the hands-on identification and evaluation skills needed to conquer competitive Livestock Skillathon contests.
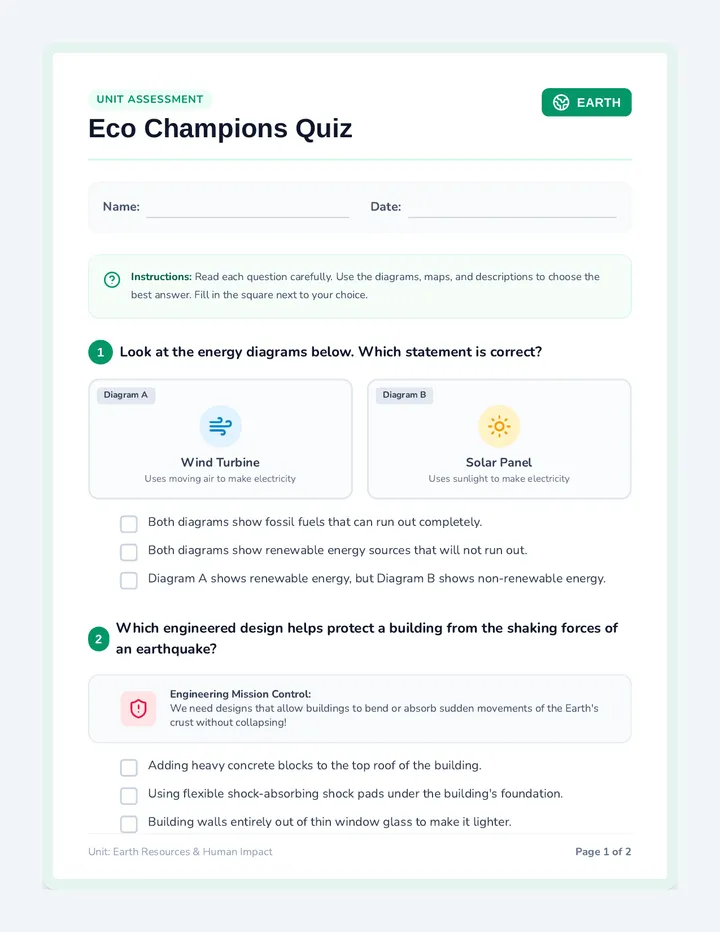
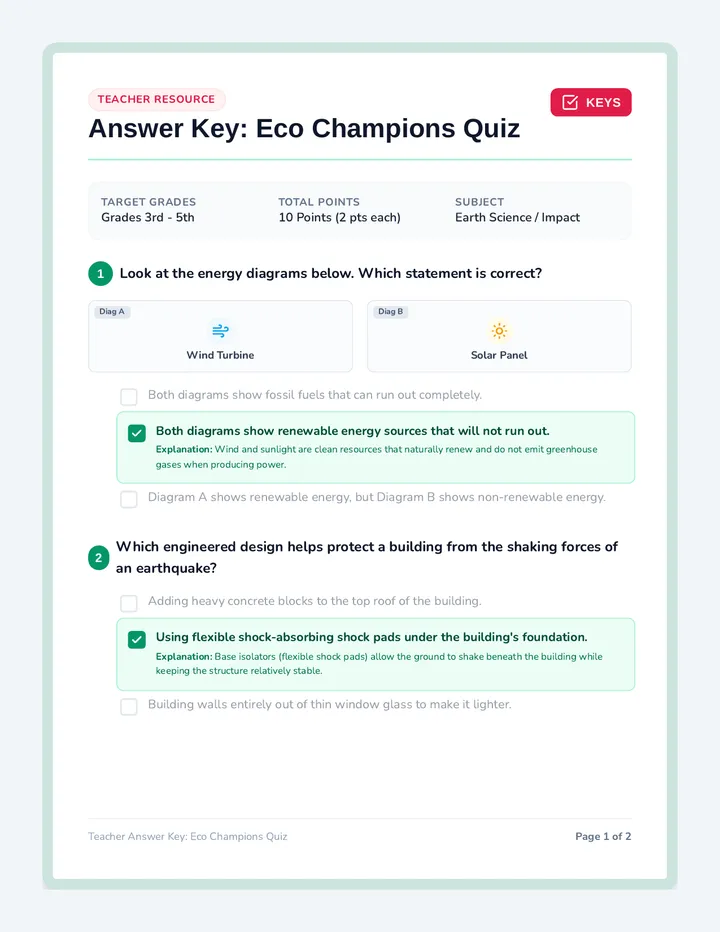
An elementary Earth Science lesson focusing on renewable energy, natural hazards, conservation, and human impact. Includes a highly visual student quiz and a corresponding teacher answer key.
A single-page 4th-grade student exit ticket with 4 open-ended conceptual questions on severe storm hazards, flash floods, hurricane safety, and engineering protection.