Apply forward and inverse kinematics to robotic arms, translating target coordinates into specific joint angles.
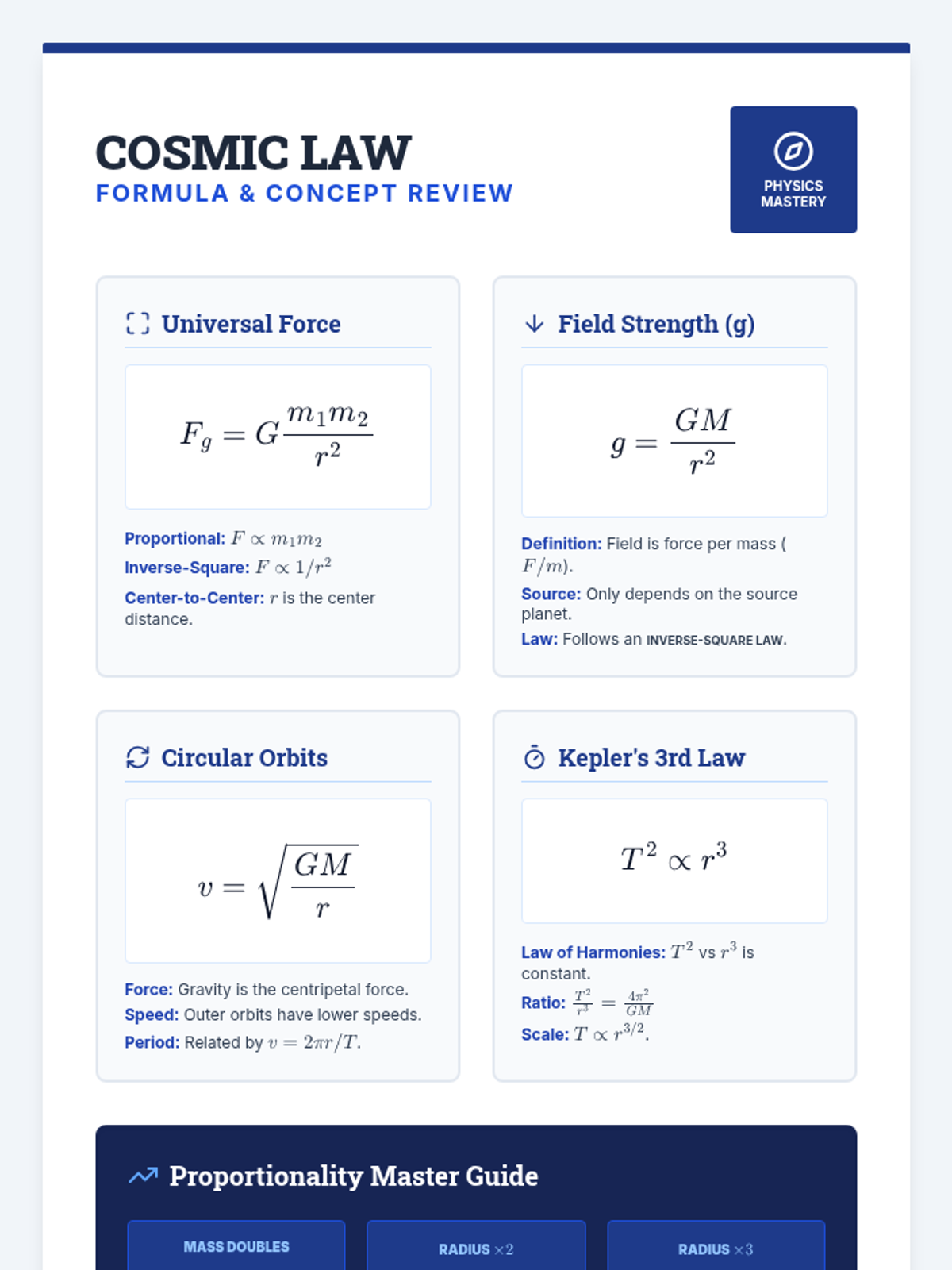
A comprehensive lesson covering Newton's Law of Universal Gravitation, gravitational field strength, and orbital mechanics, designed for AP Physics 1 students to master the inverse-square law and Kepler's Third Law.
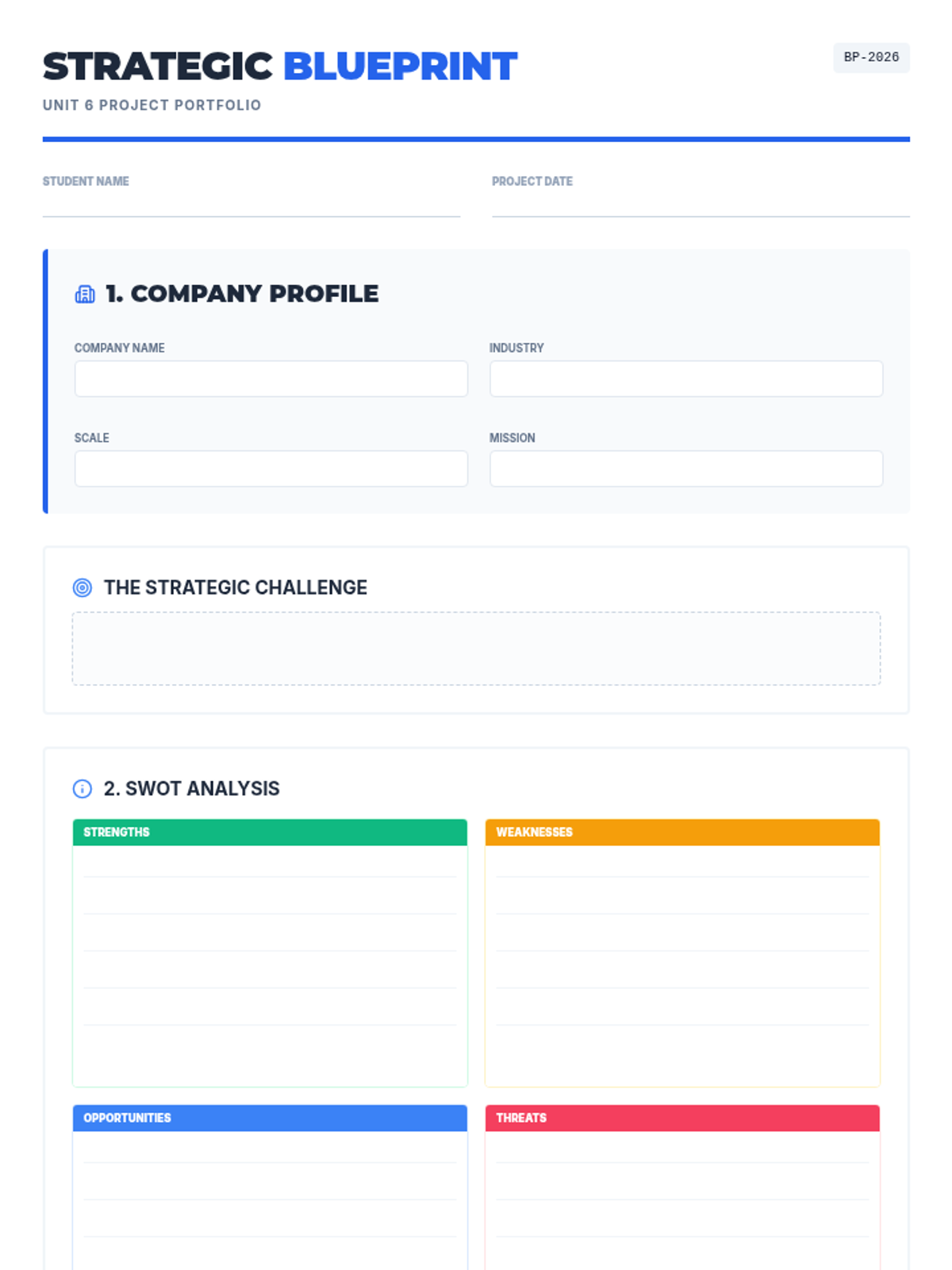
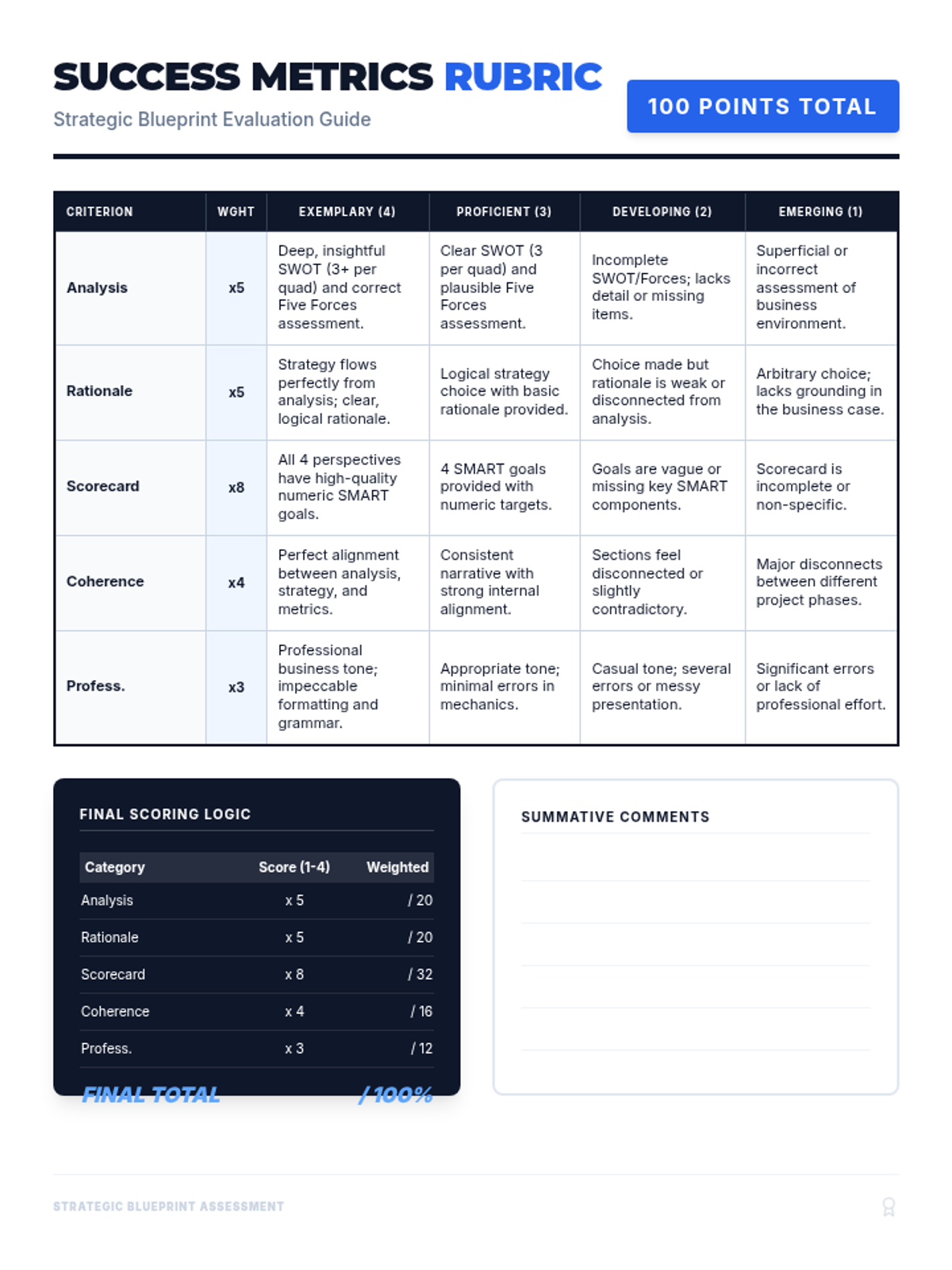
A comprehensive business strategy project where students act as consultants to develop a strategic plan and performance measurement system using SWOT analysis, Porter's Five Forces, and the Balanced Scorecard. This project includes scaffolded templates for analysis and a structured framework for goal setting.
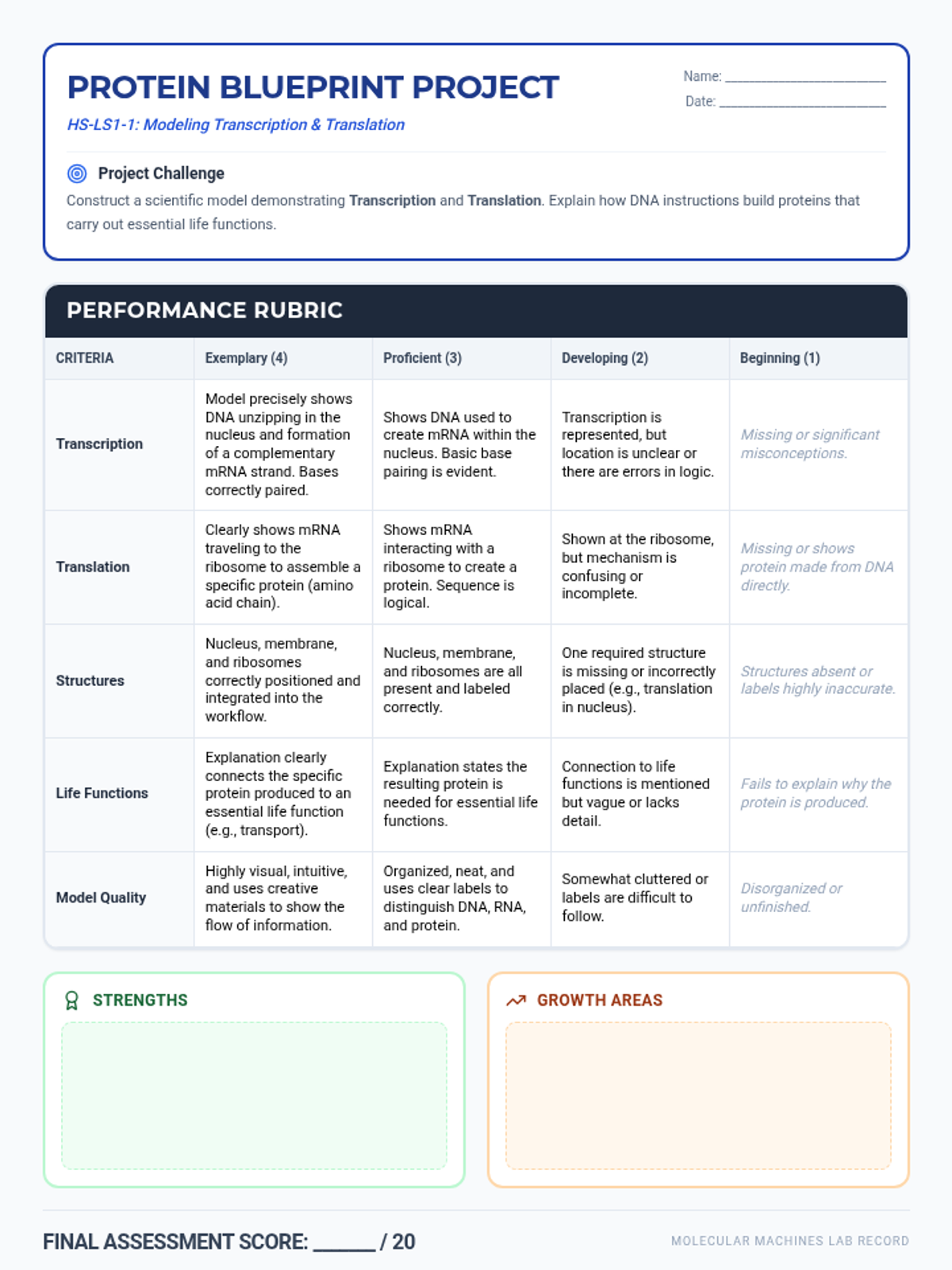
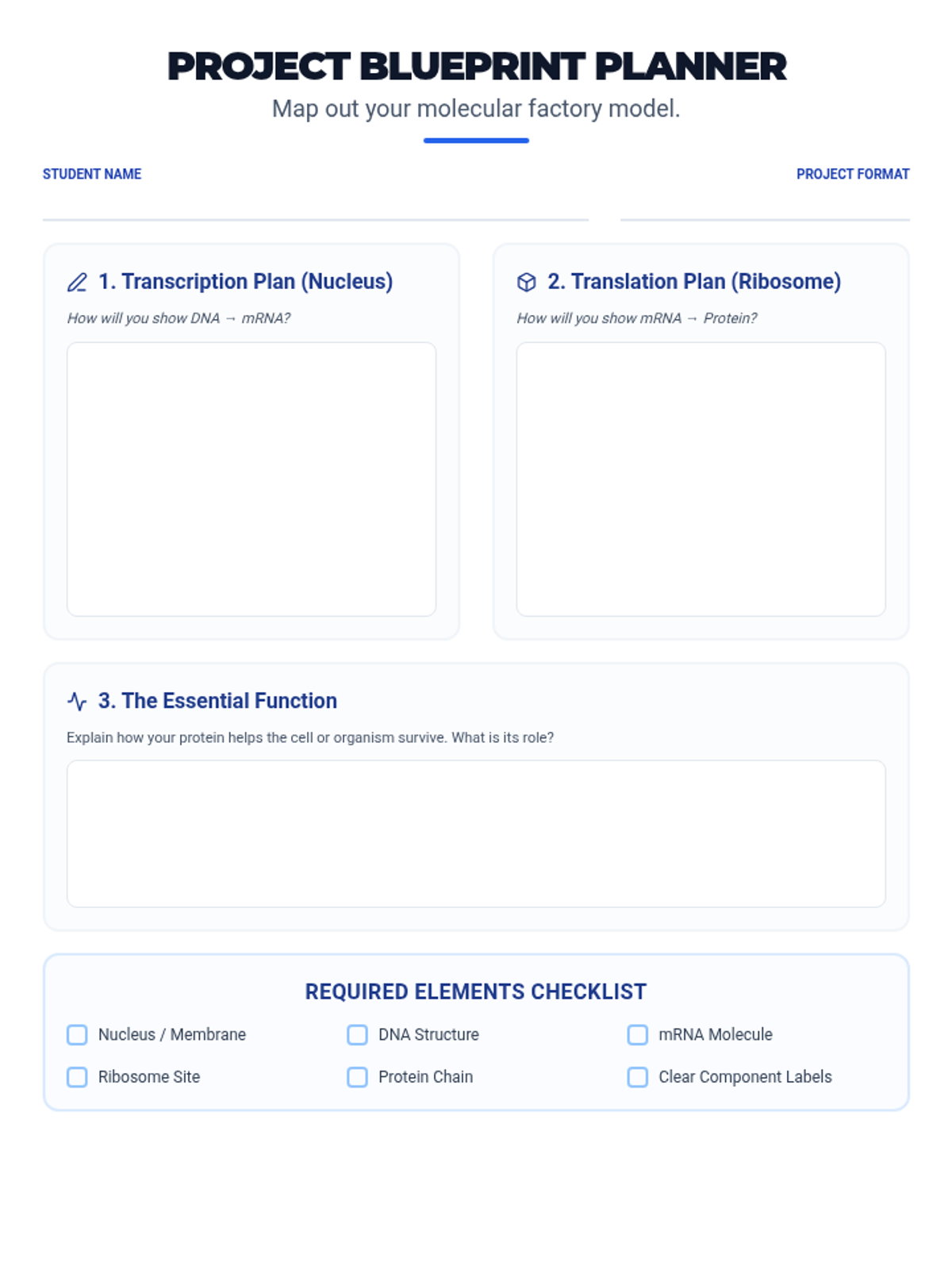
This lesson guides students through a summative project where they construct and explain models of transcription and translation, focusing on the flow of genetic information from DNA to proteins within the cell.
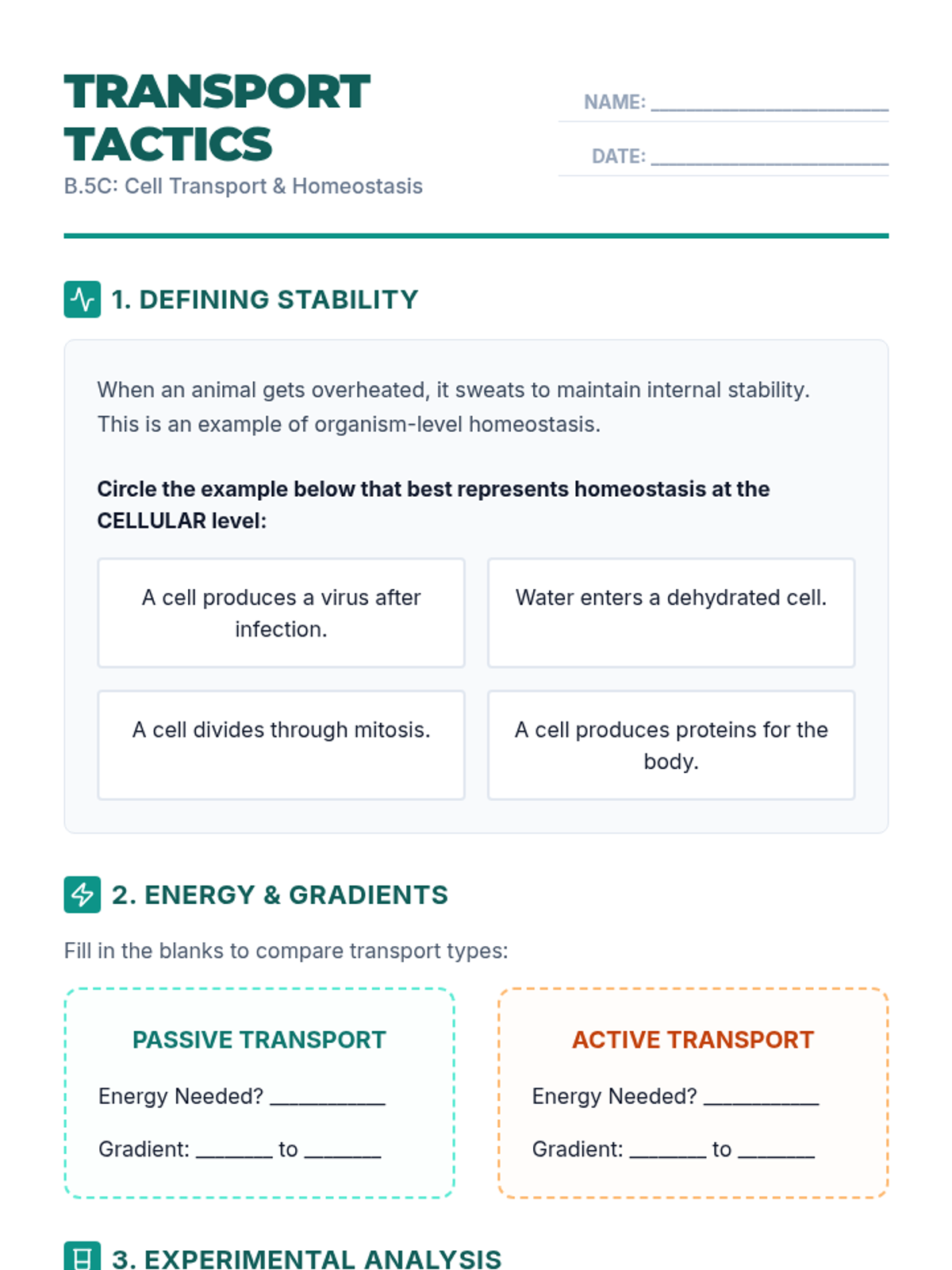
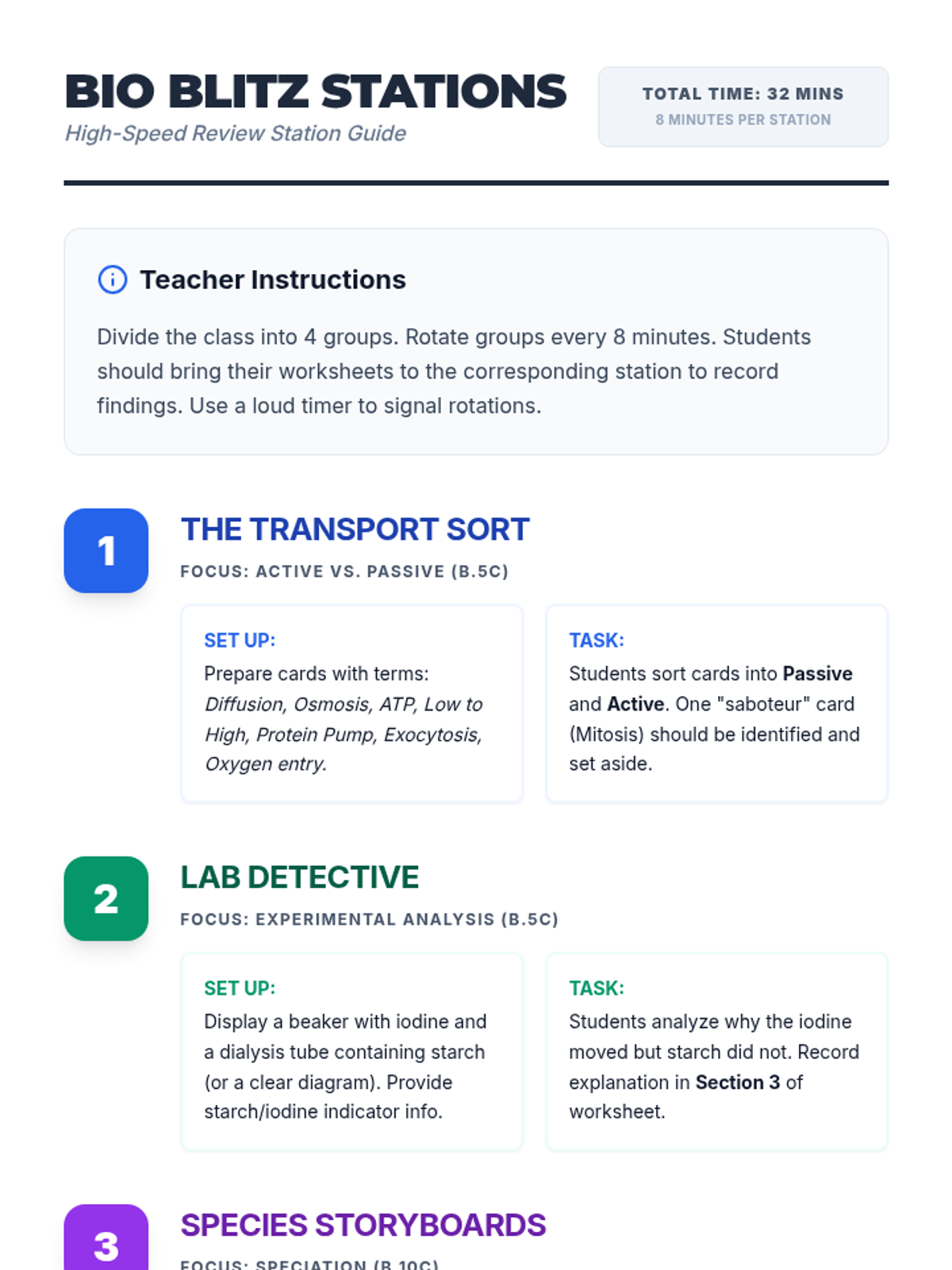
A 50-minute high-energy review lesson covering cell membrane dynamics, homeostasis, and the mechanisms of speciation.
A comprehensive project-based lesson where students develop a strategic plan and a Balanced Scorecard for a business, moving from situational analysis to actionable metrics.
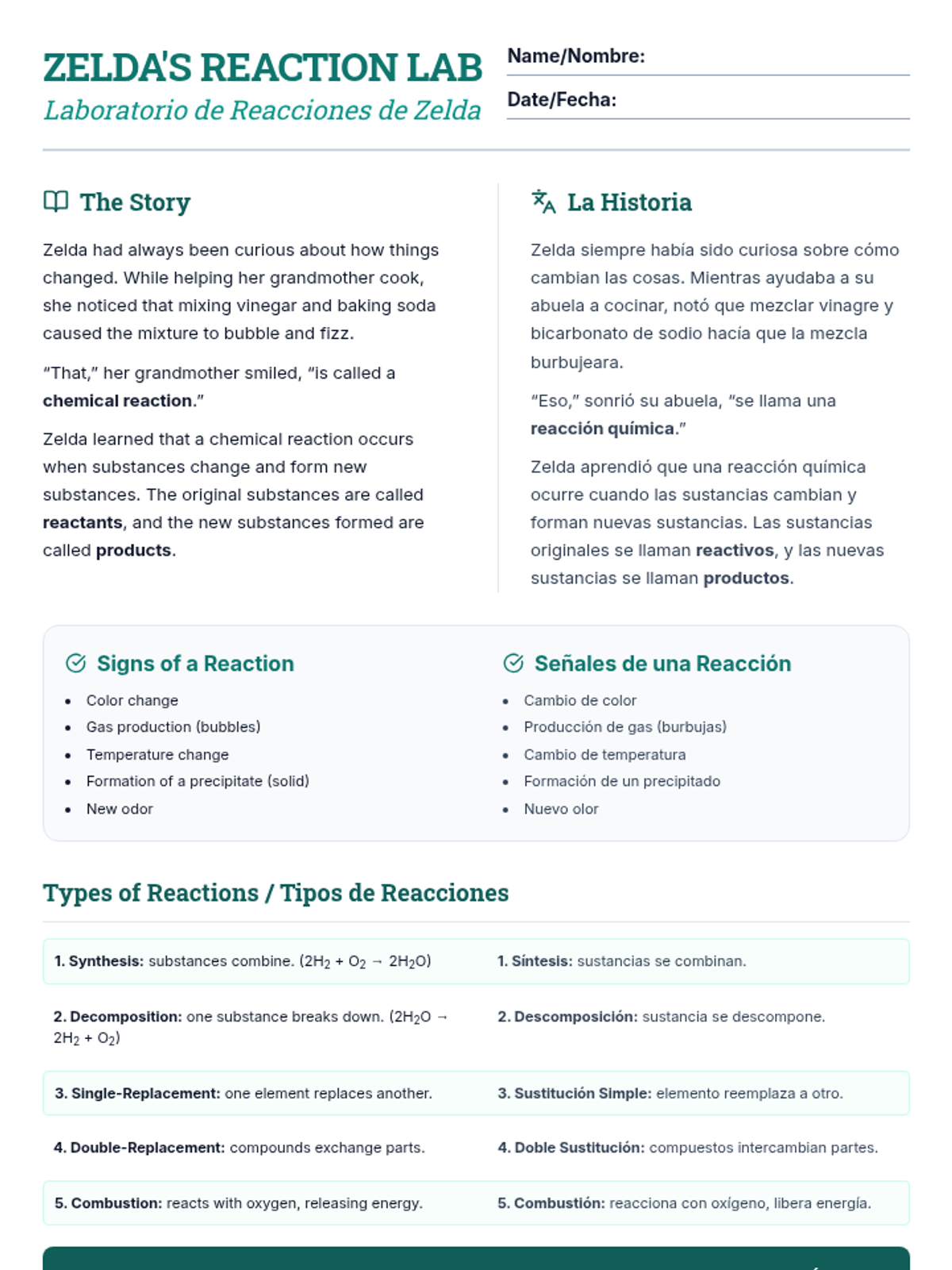
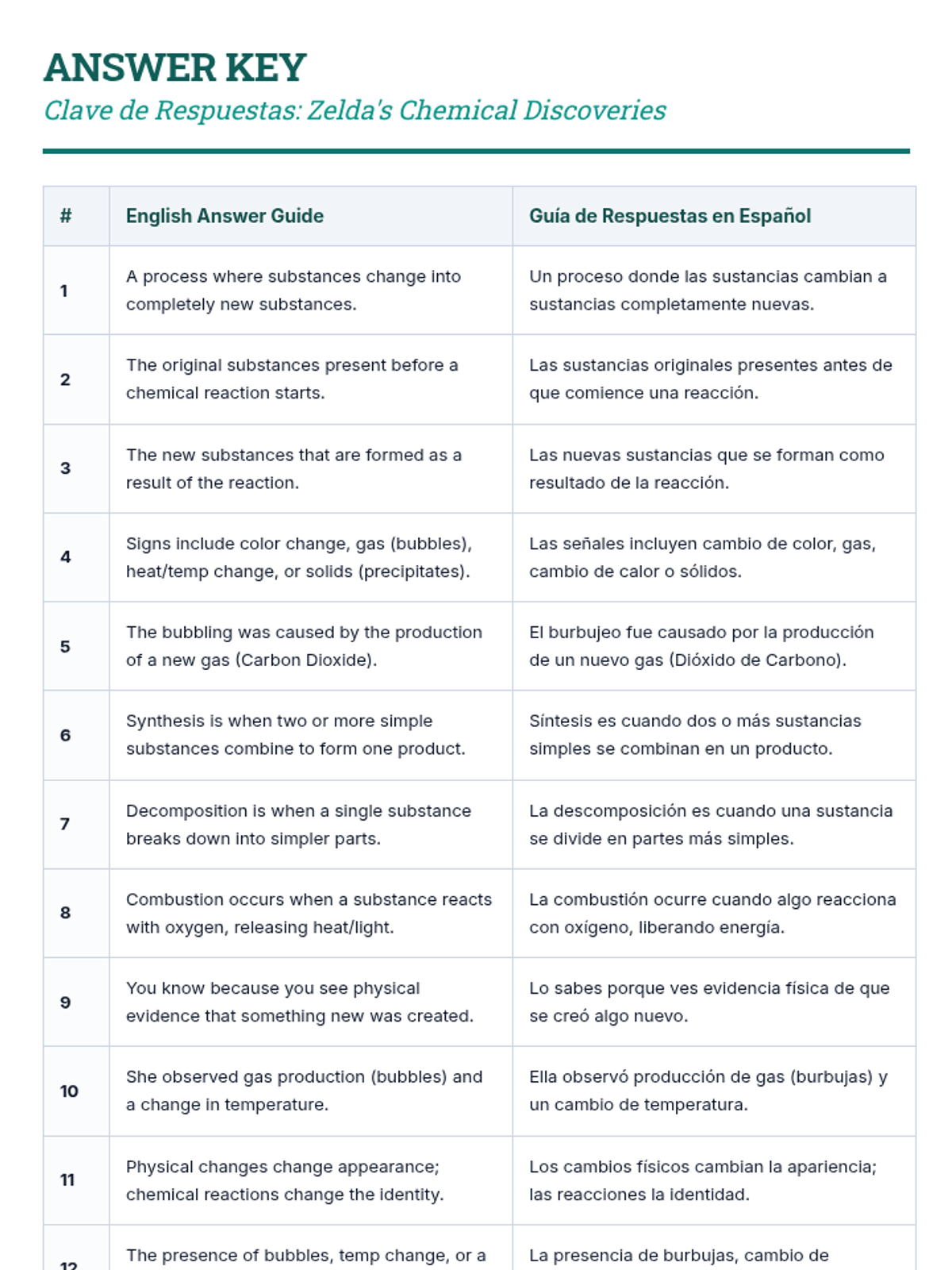
A bilingual (English/Spanish) lesson exploring chemical reactions through a narrative about a girl named Zelda, covering reaction signs, types, and identification.
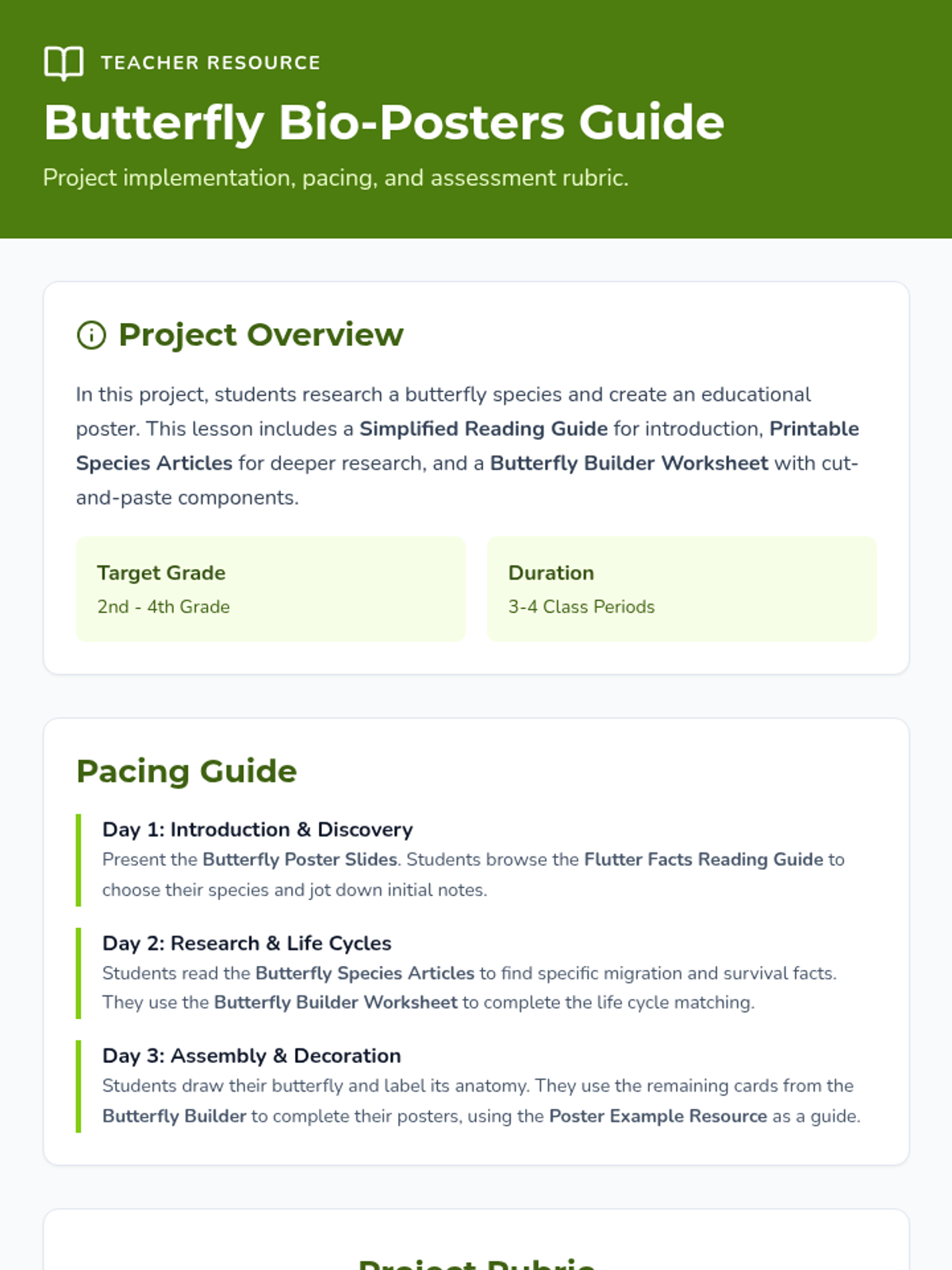
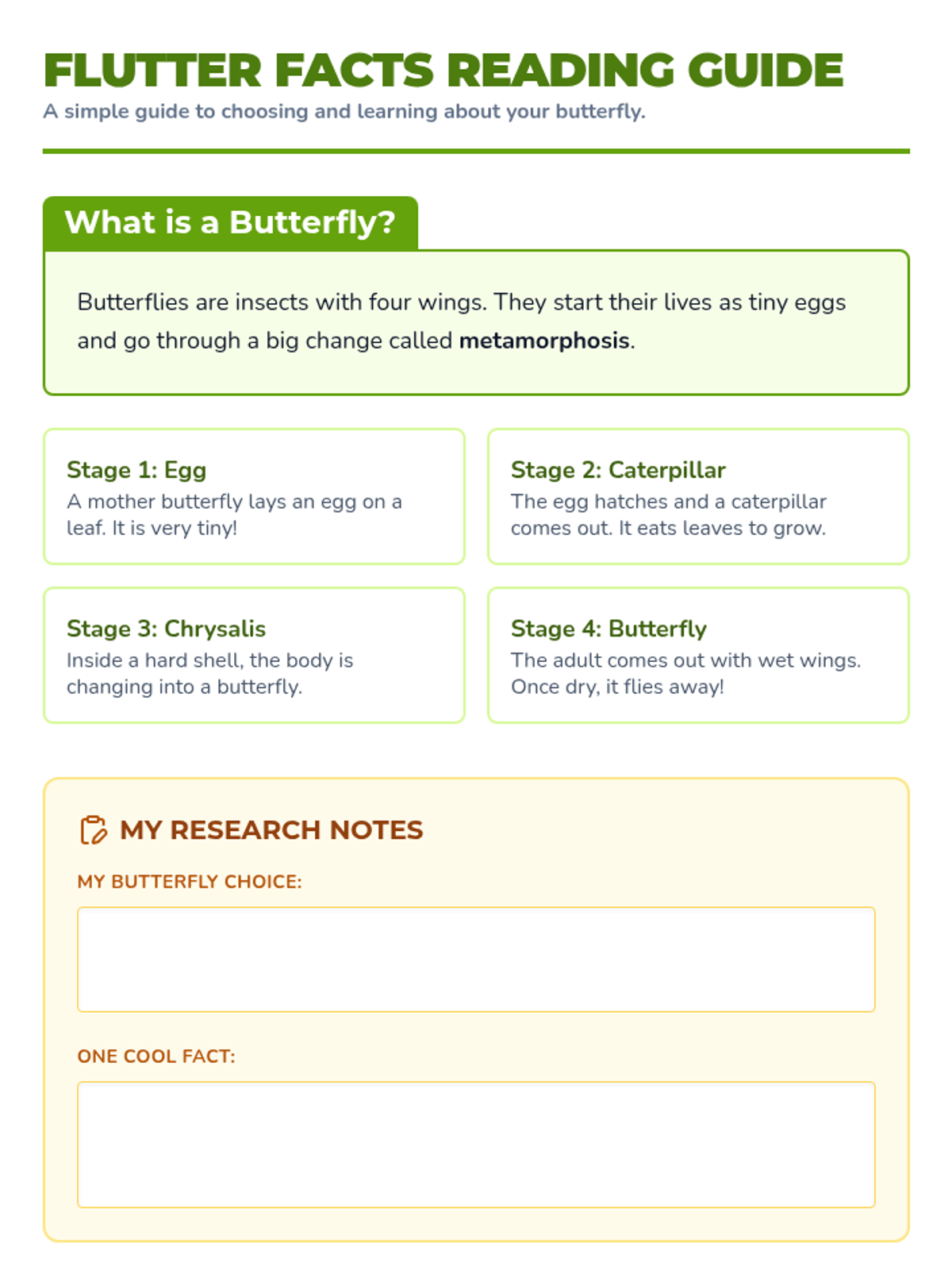
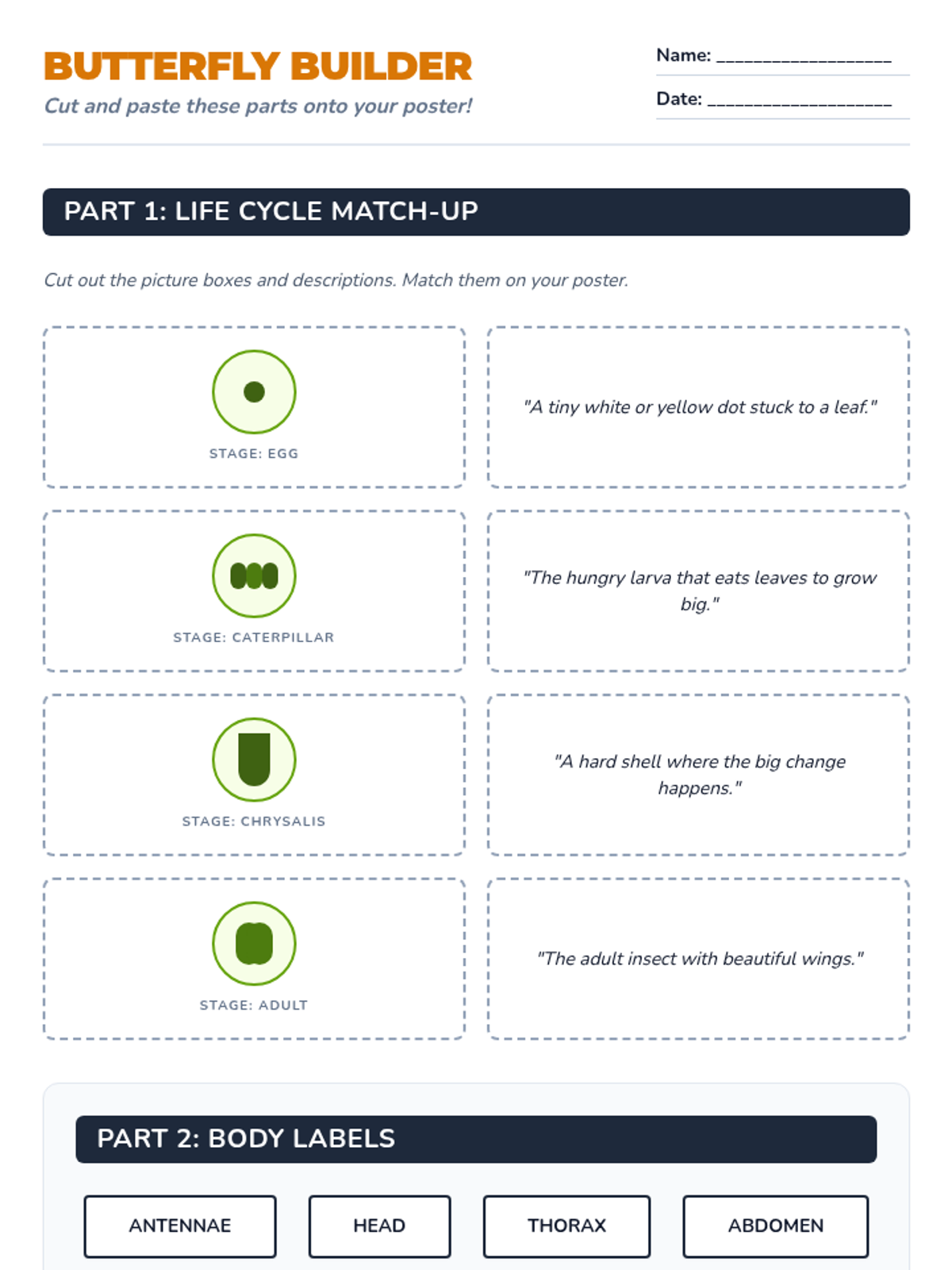
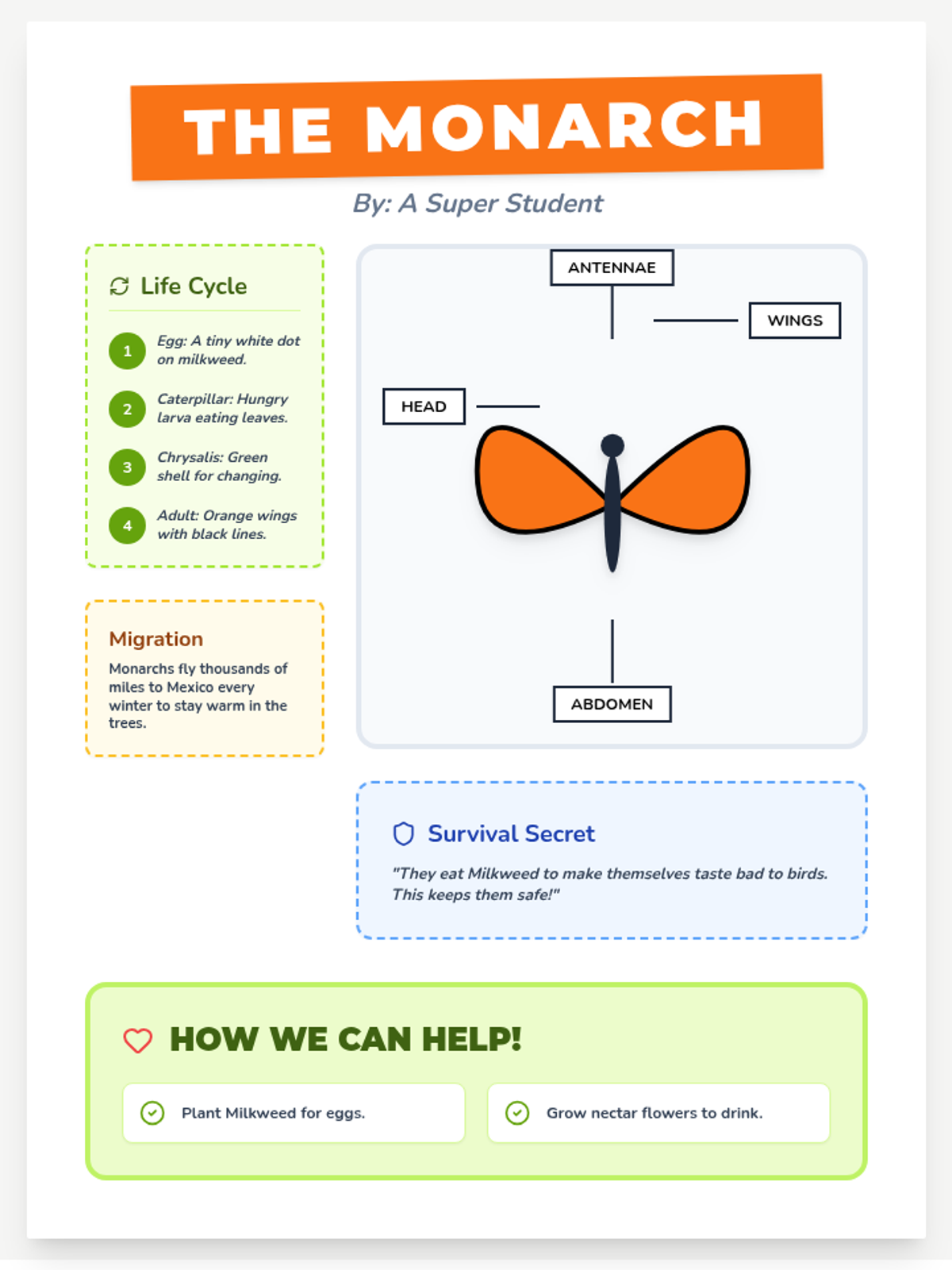
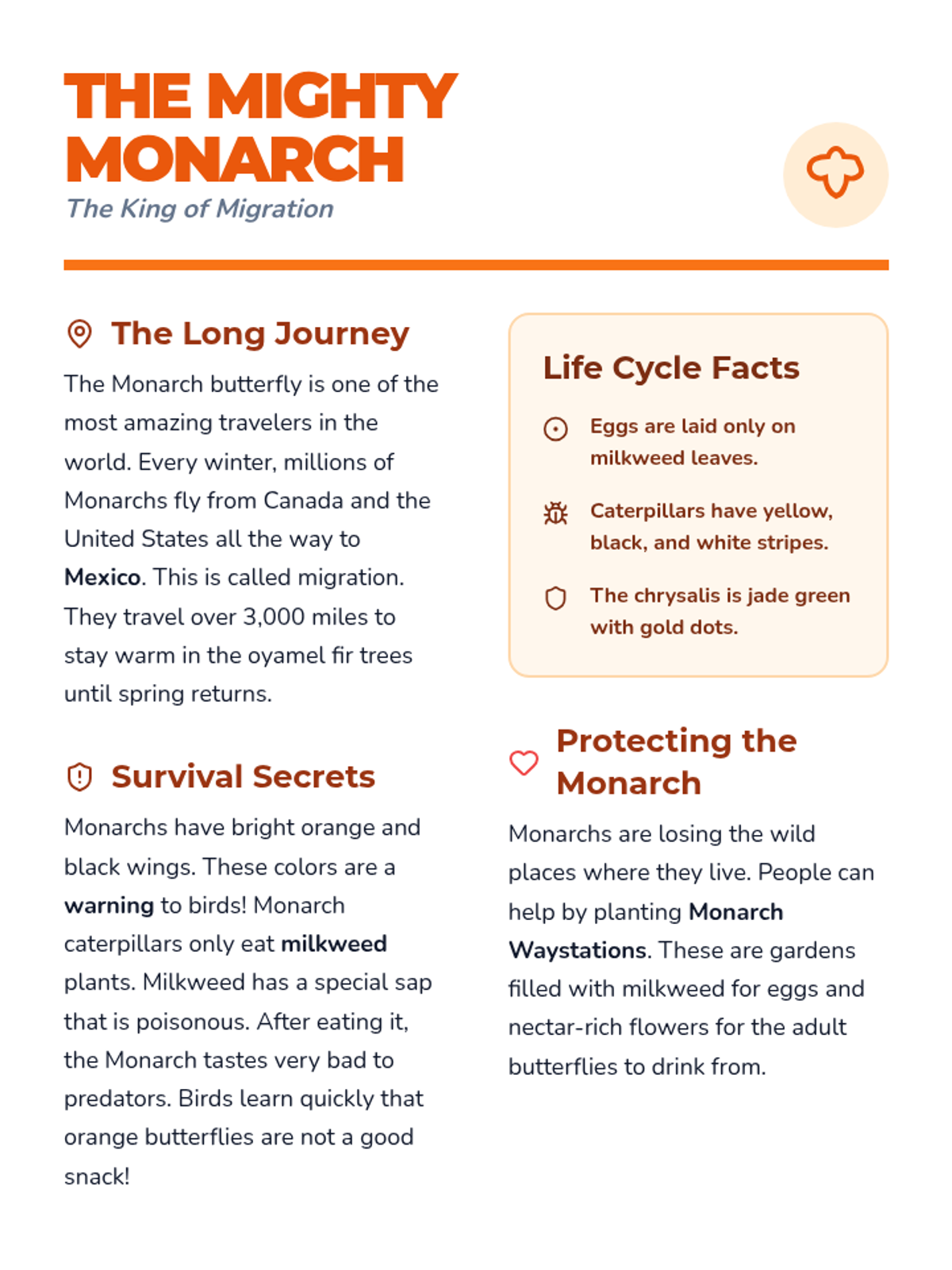
A creative science project where students research a butterfly species of their choice and design an informative poster. The lesson includes a simplified reading guide, cut-and-paste components, and a presentation to guide the project.
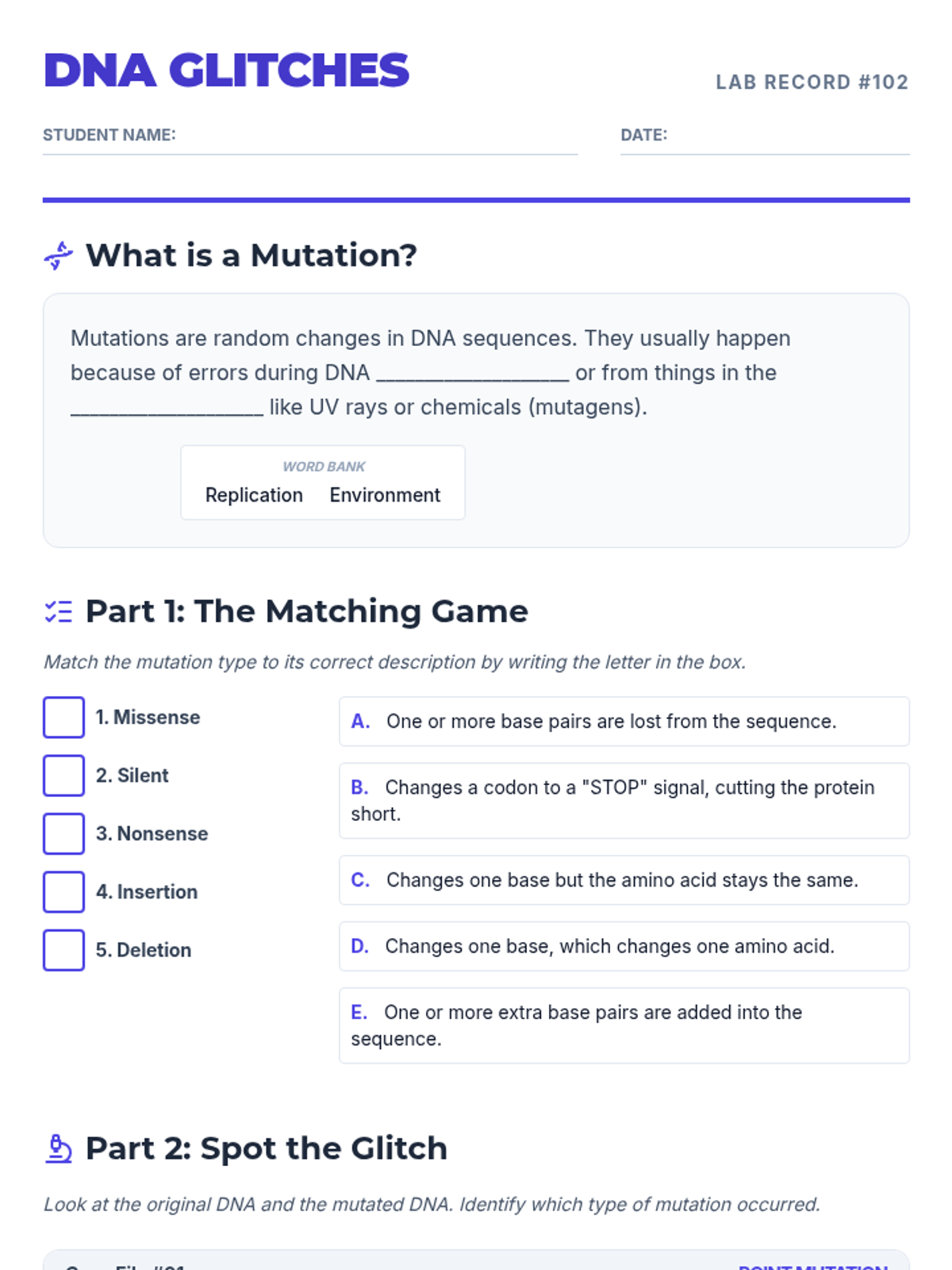
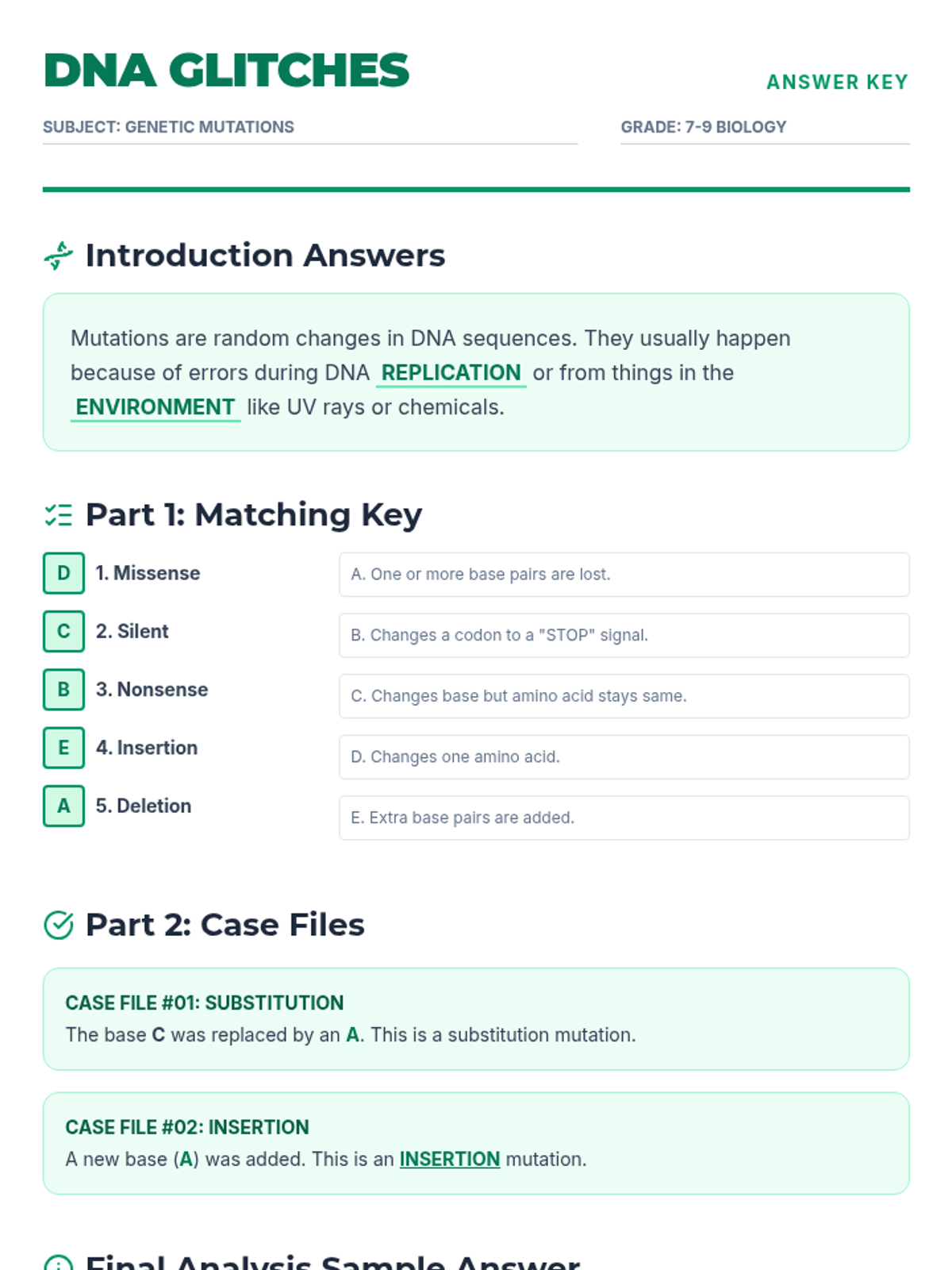
An introductory lesson on genetic mutations, covering point mutations and frameshift mutations, and how they affect protein synthesis.
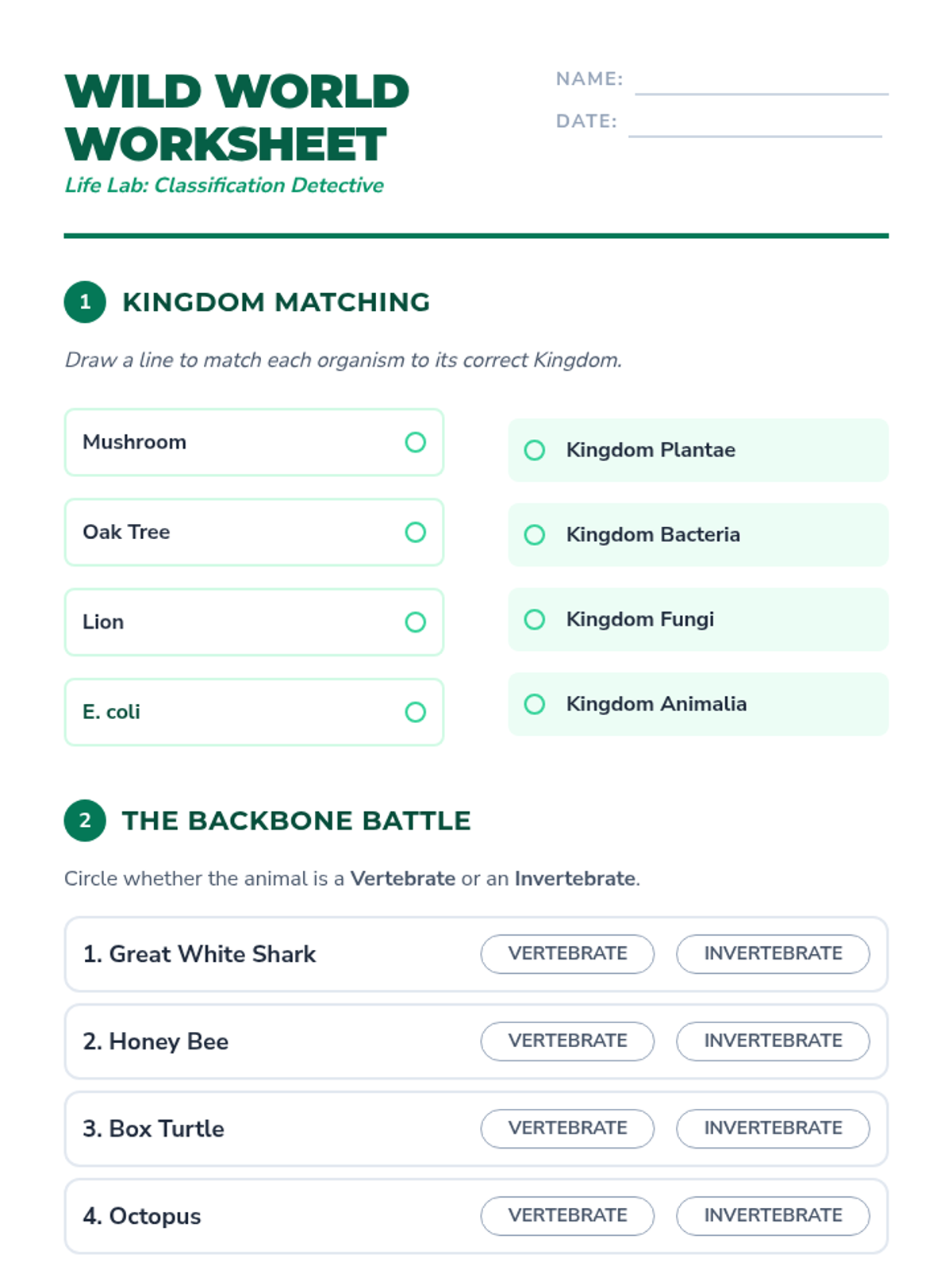
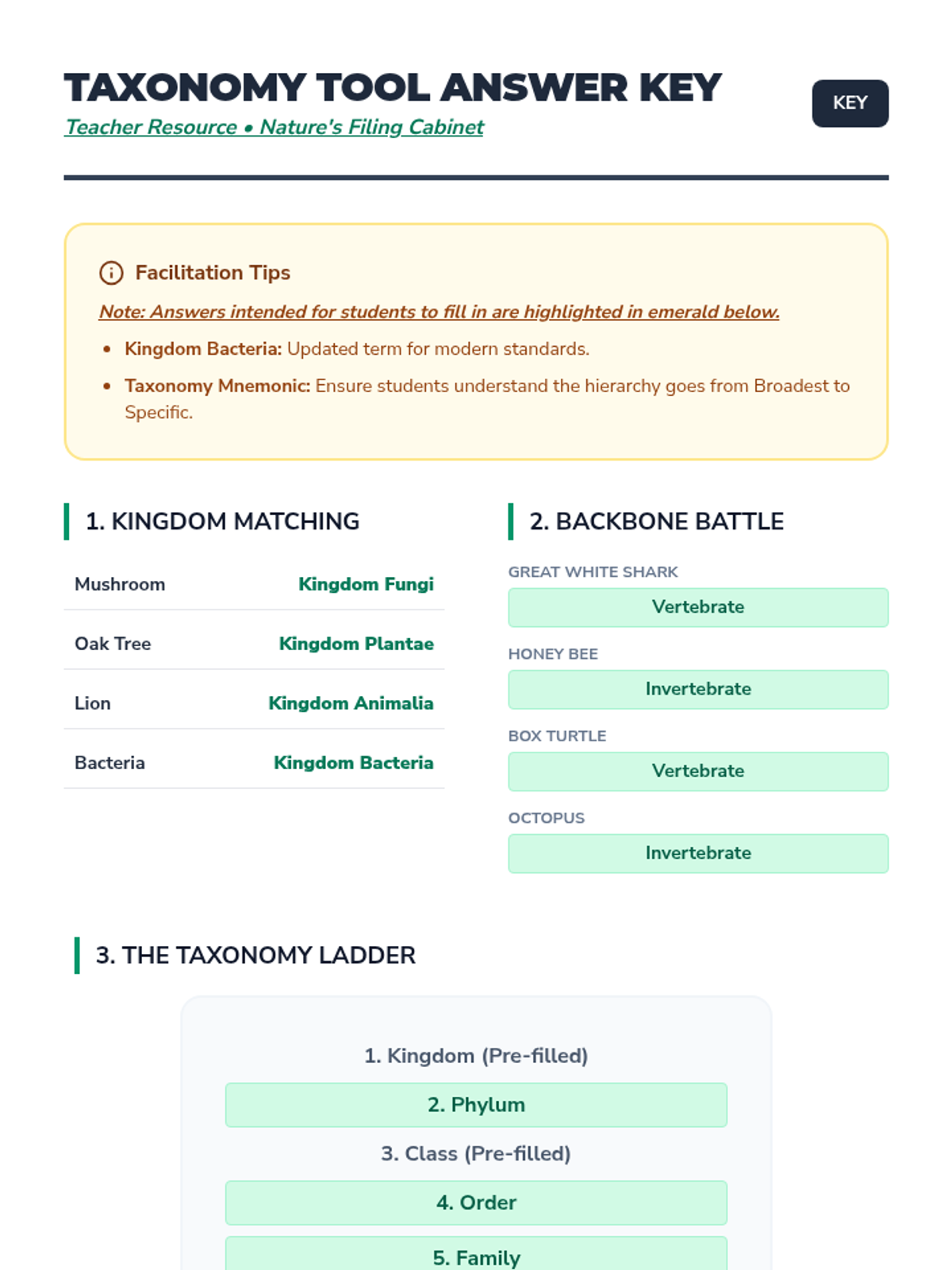
A foundational lesson exploring how scientists group living things using the Linnaean classification system, focusing on kingdoms and the distinction between vertebrates and invertebrates.
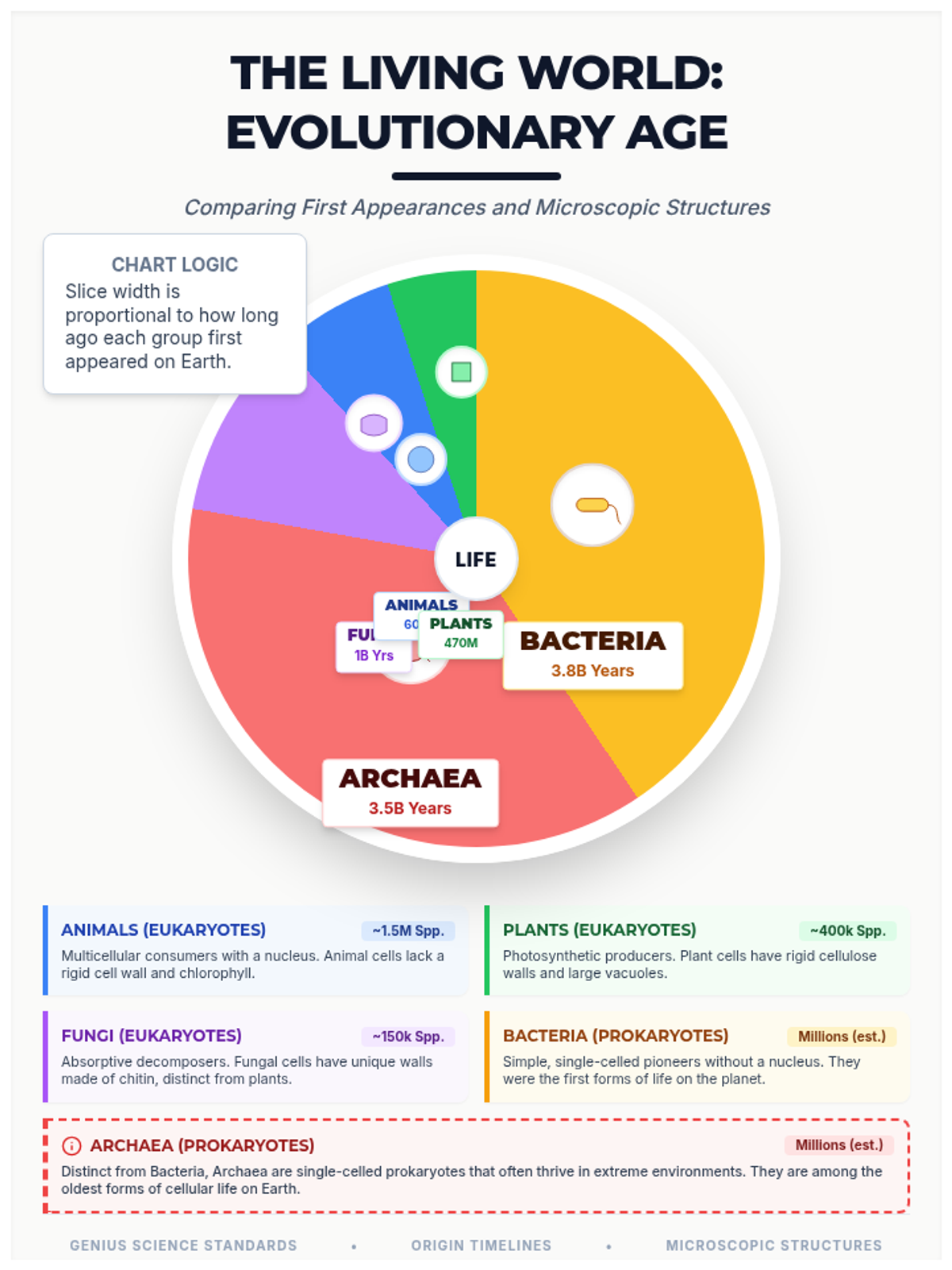
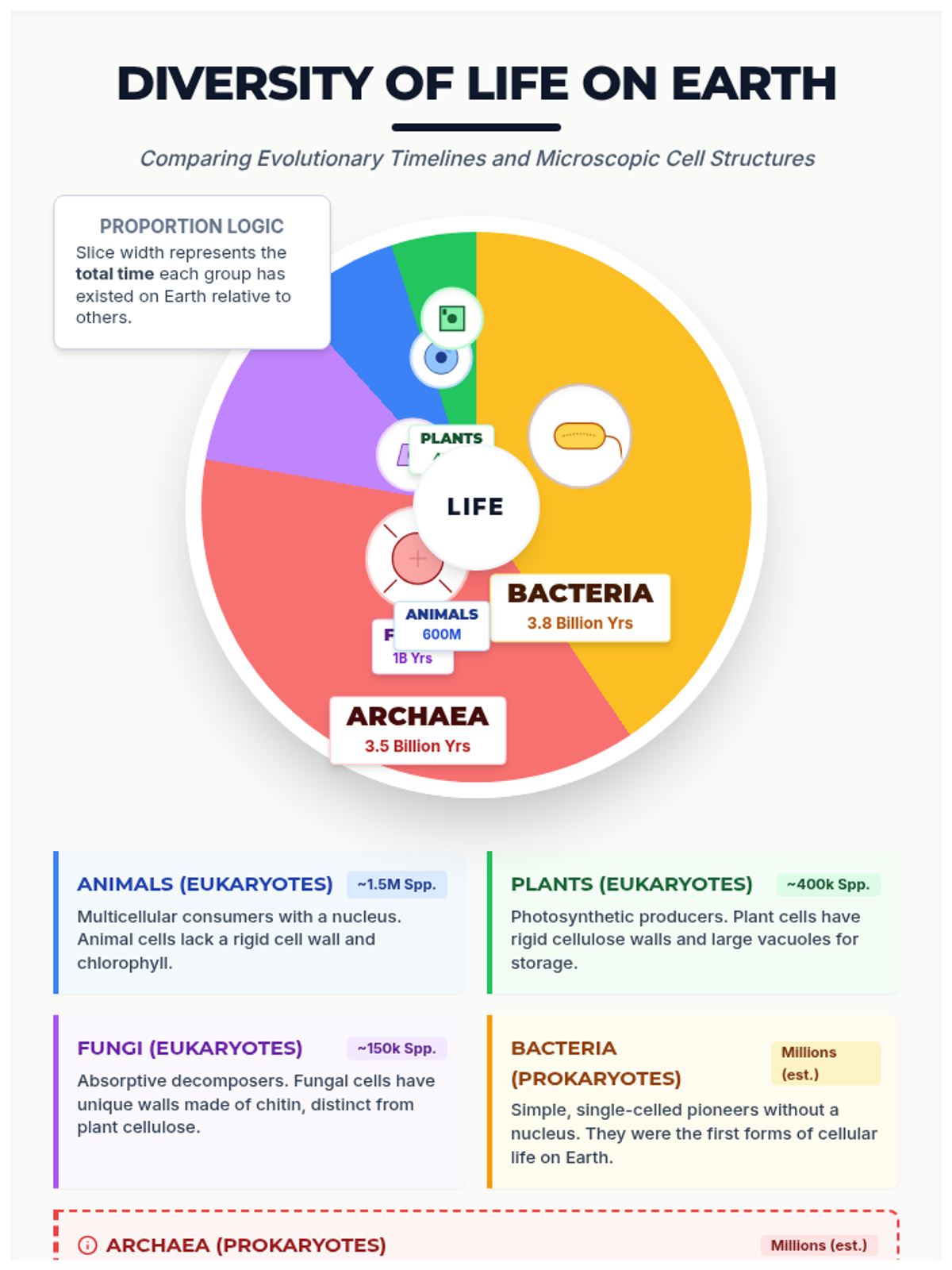
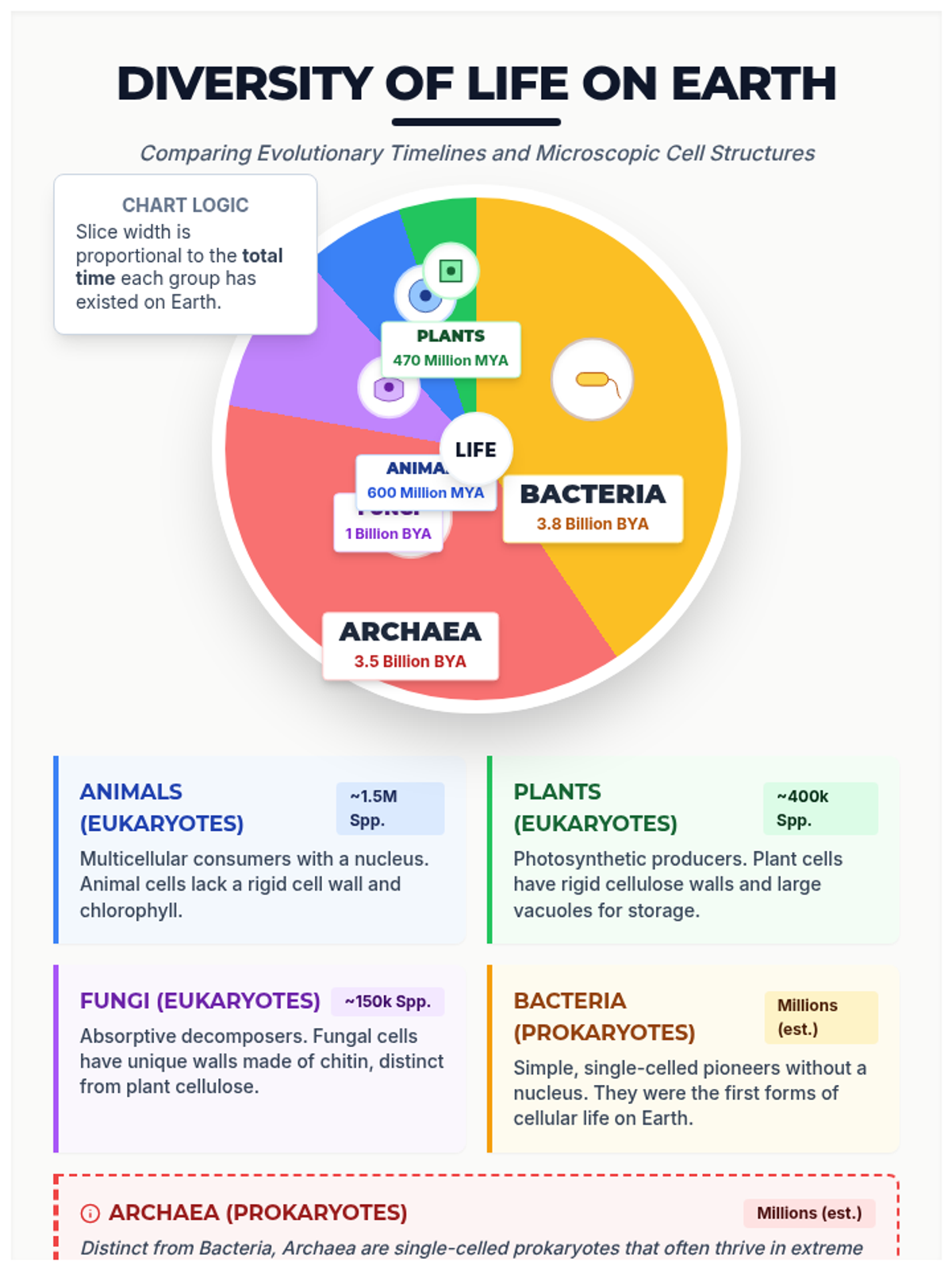
Explore the classification of life through the 5 Kingdoms: Animals, Plants, Fungi, Bacteria, and Viruses. Students will learn the key characteristics that define each group and discuss the unique biological status of viruses.
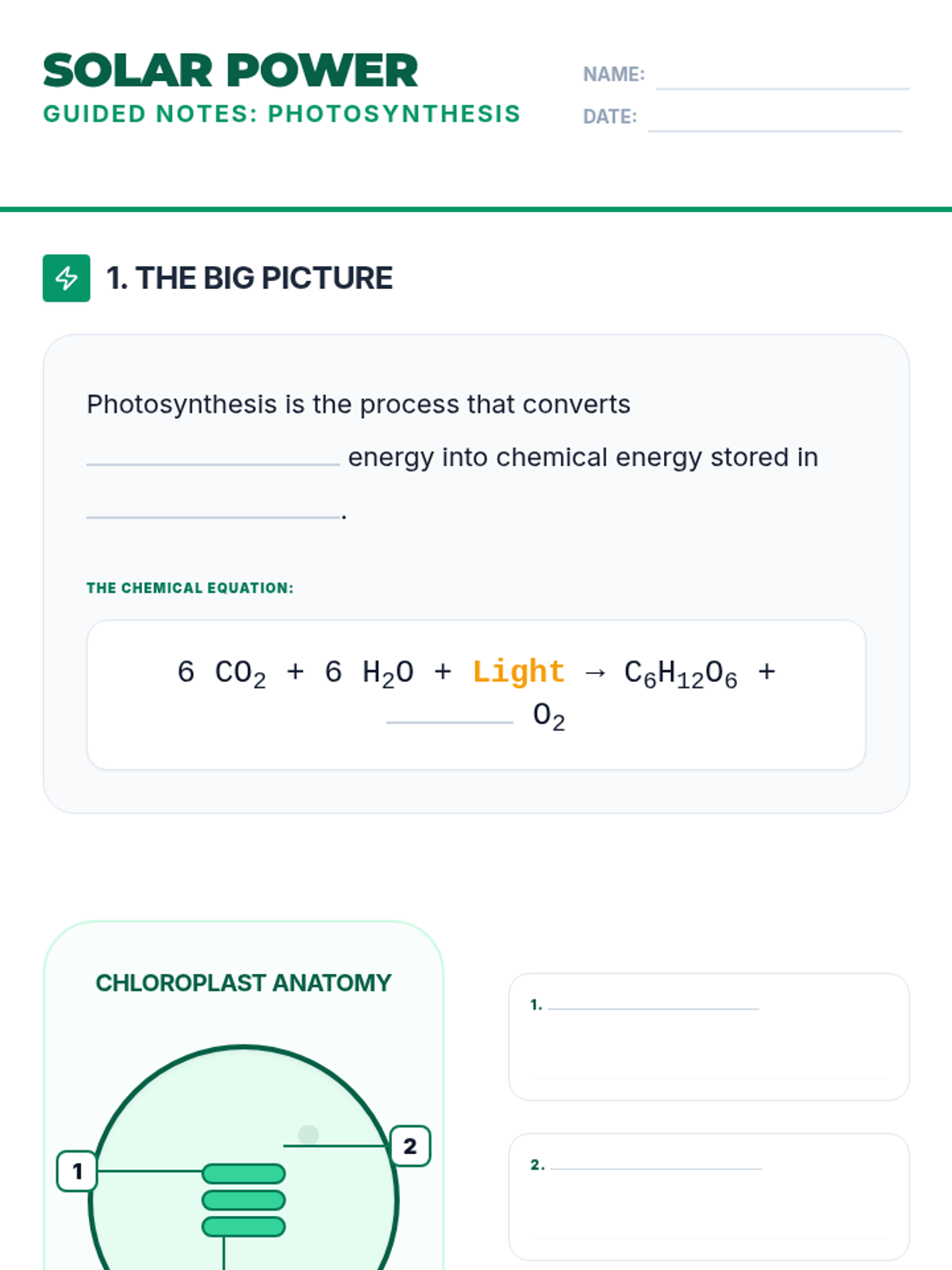
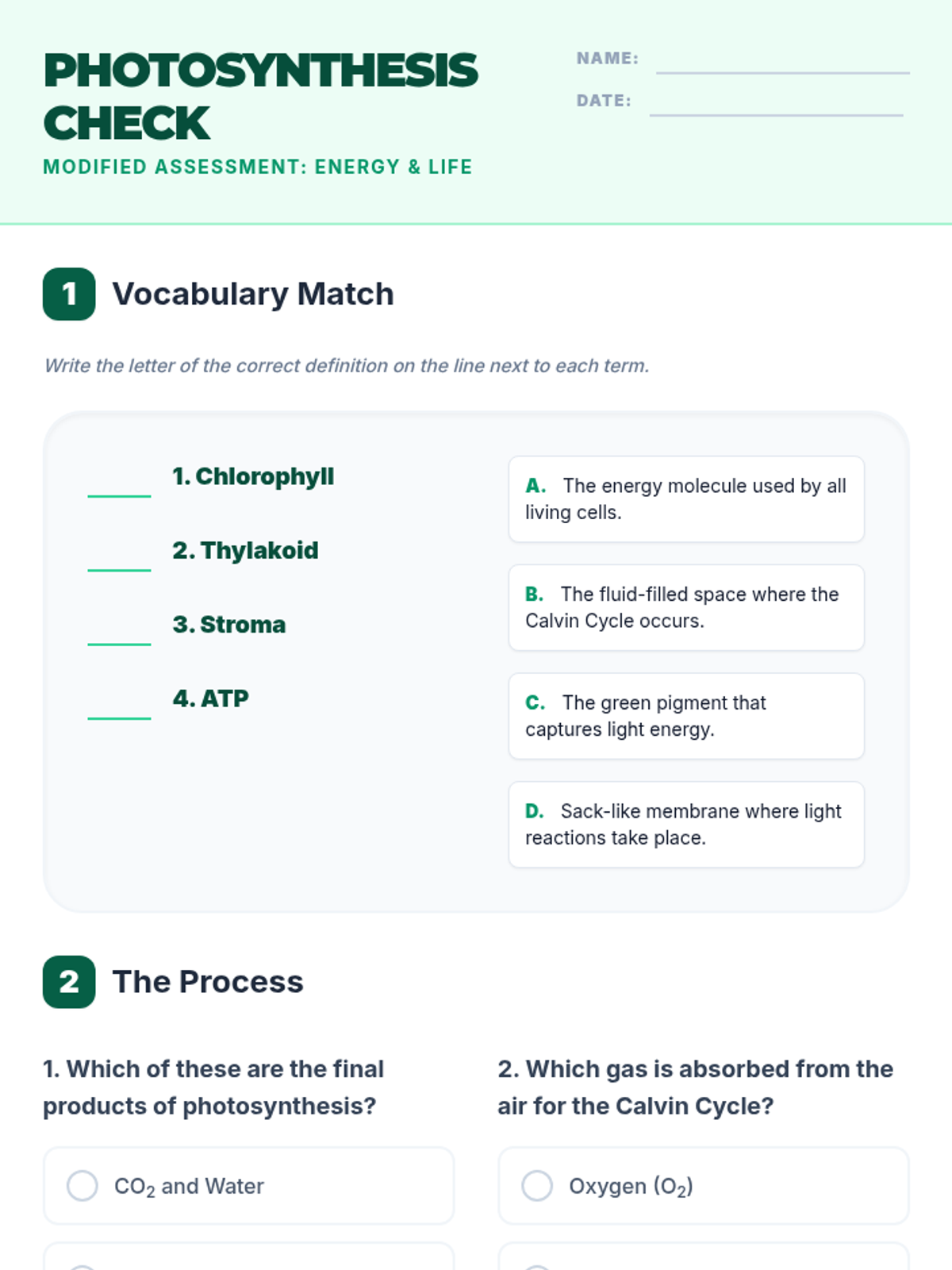
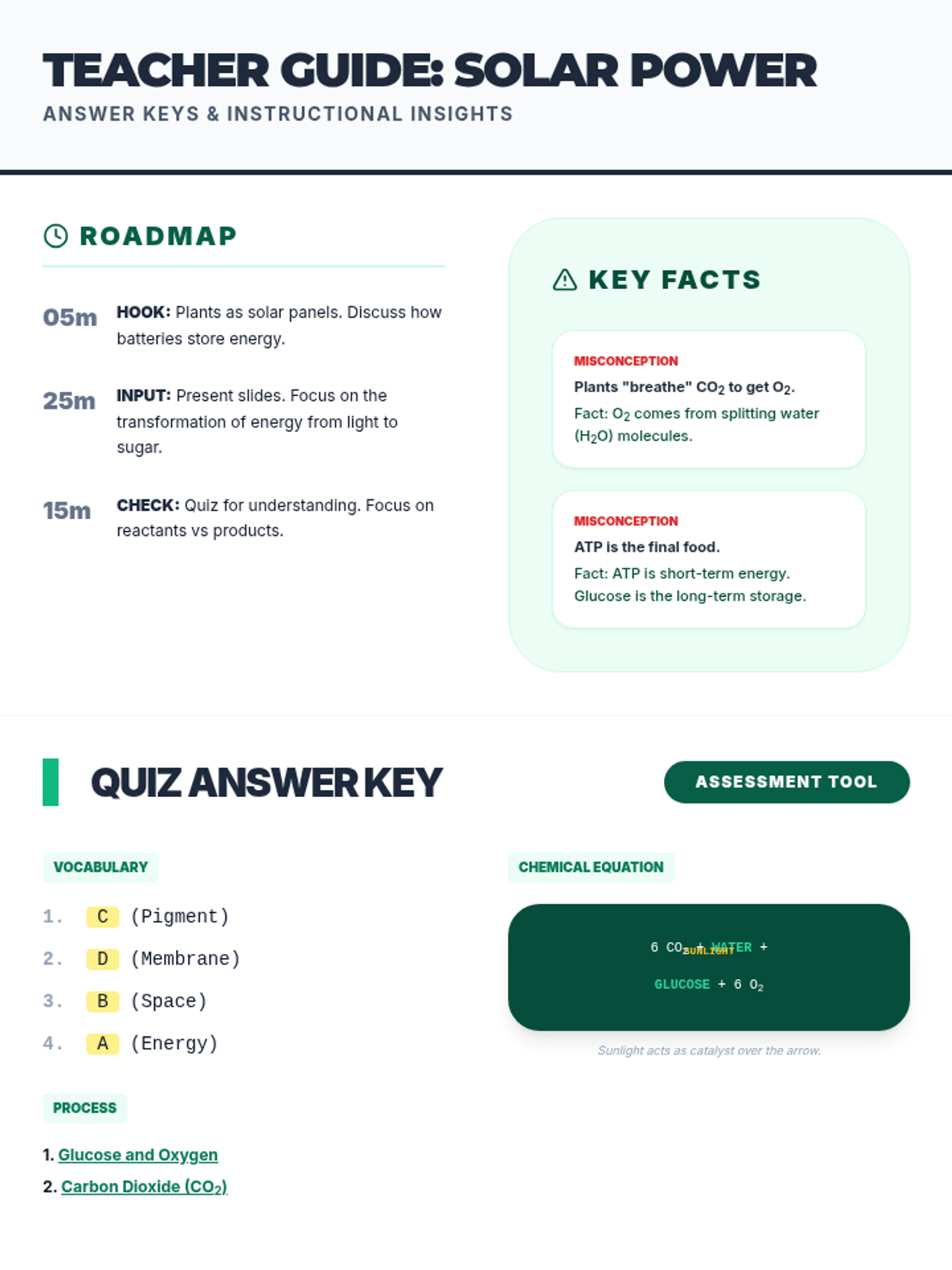
A comprehensive dive into photosynthesis, covering chloroplast anatomy, the light-dependent and light-independent reactions, and the flow of energy through ATP and NADPH.
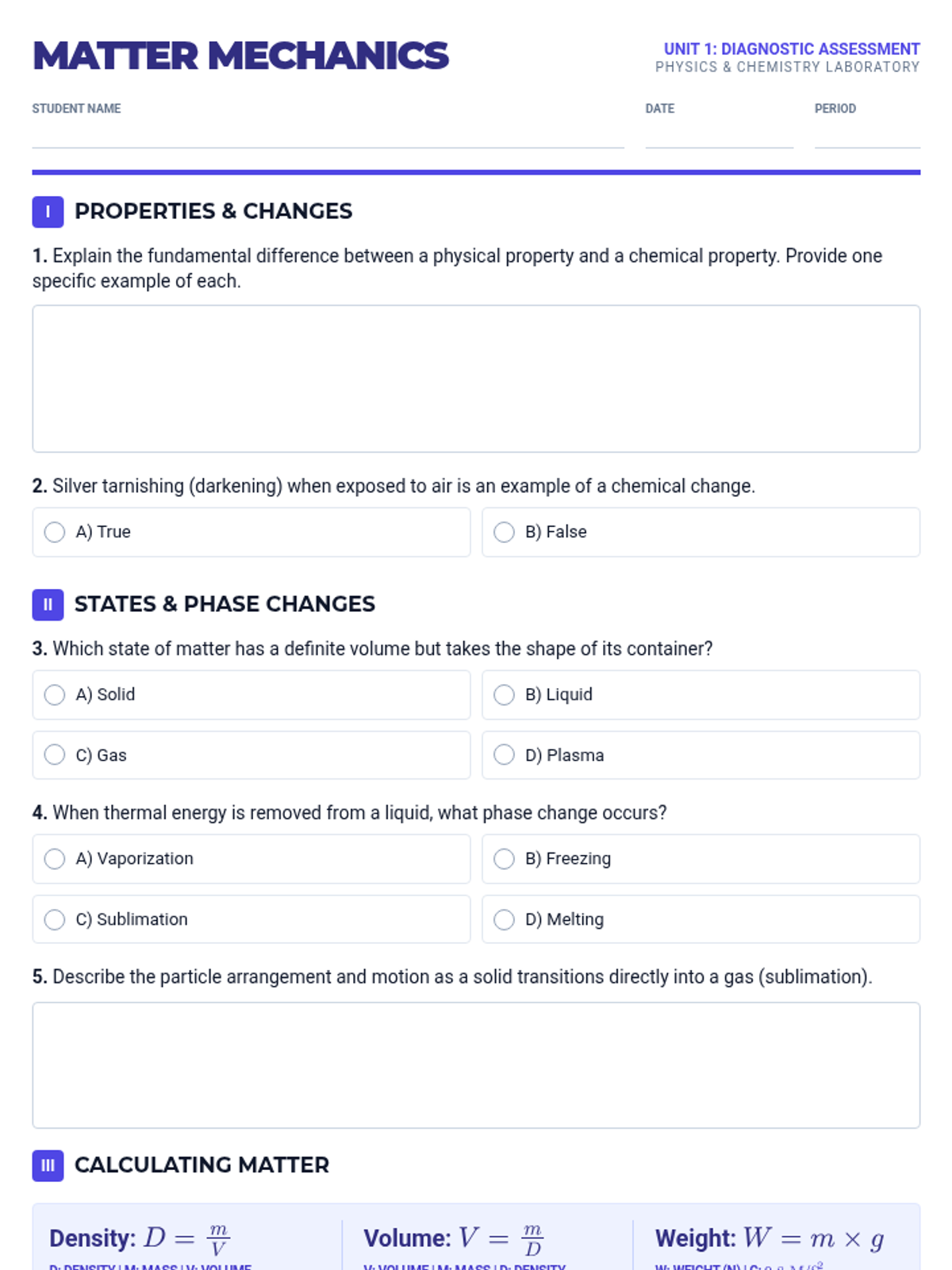
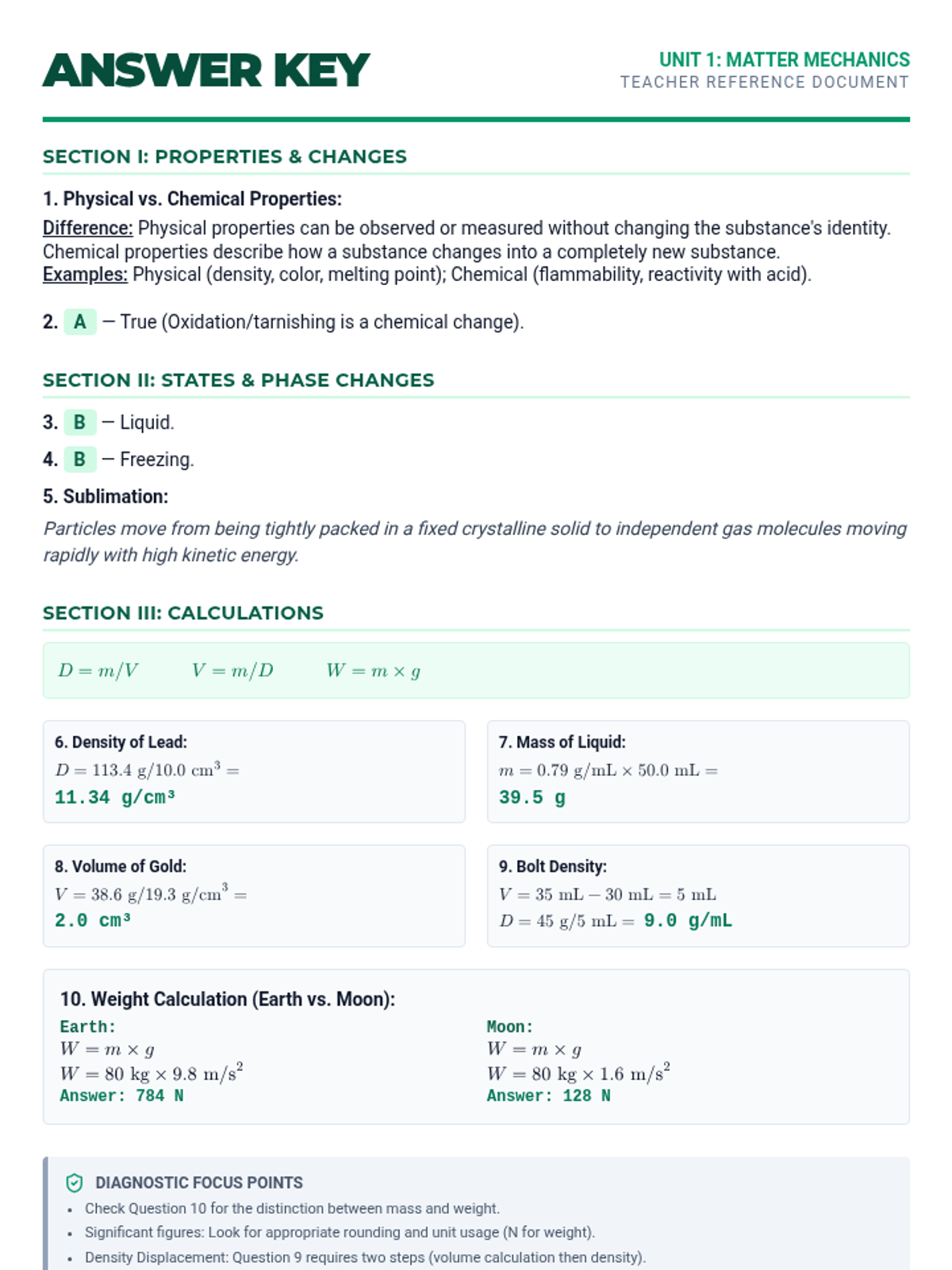
A comprehensive diagnostic assessment designed to evaluate 9th-grade students' understanding of physical and chemical properties, states of matter, and density calculations.
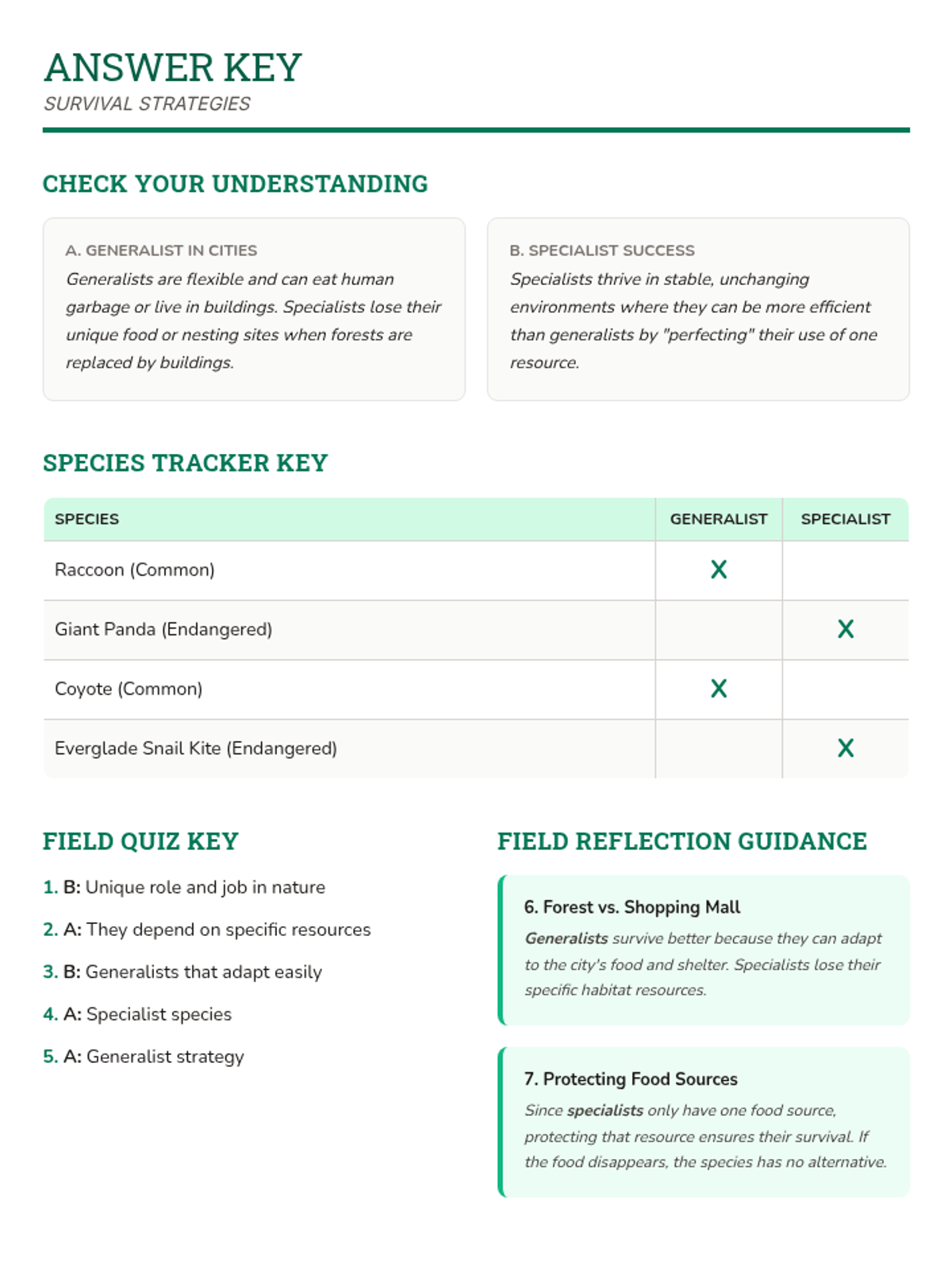
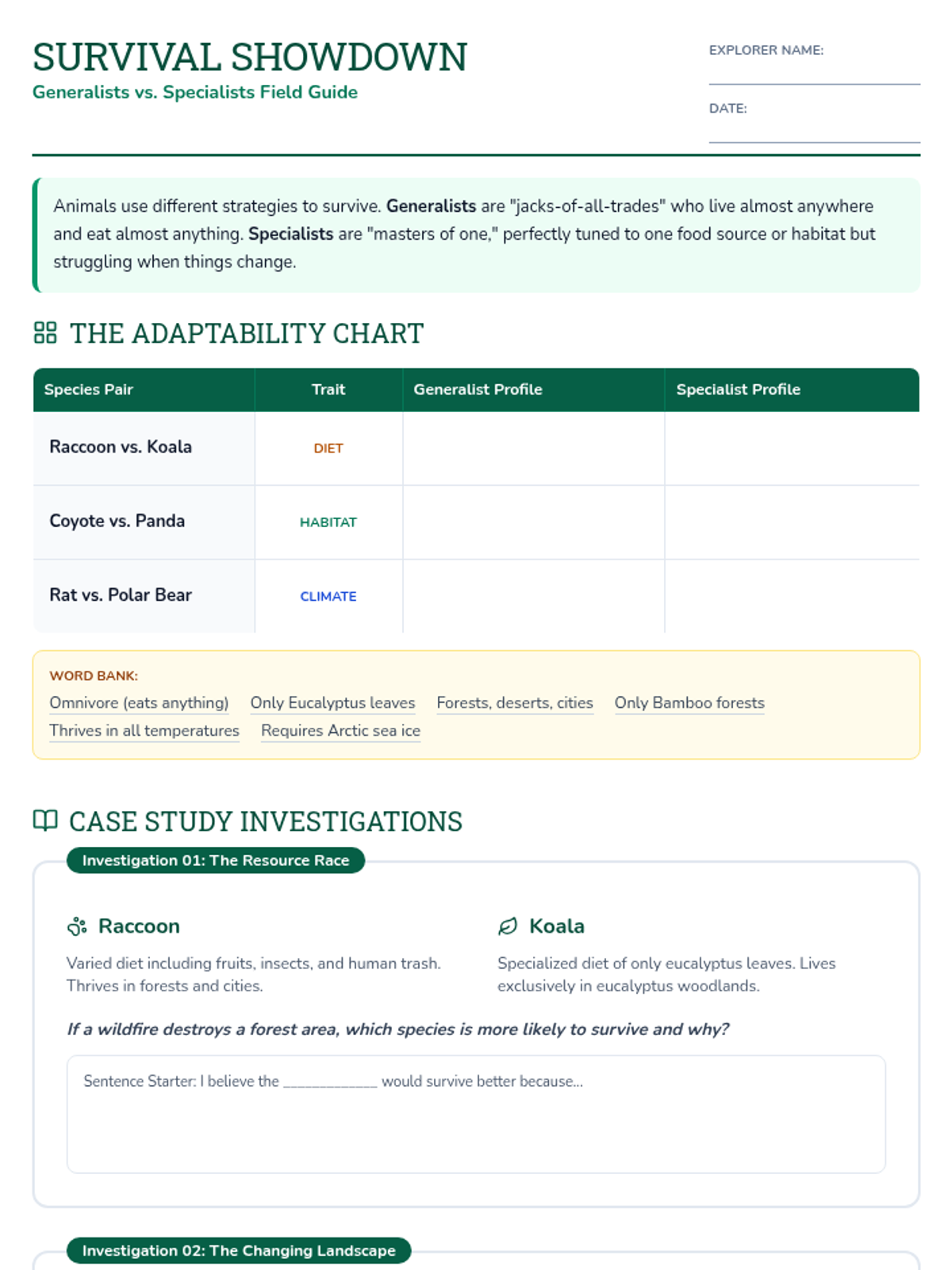
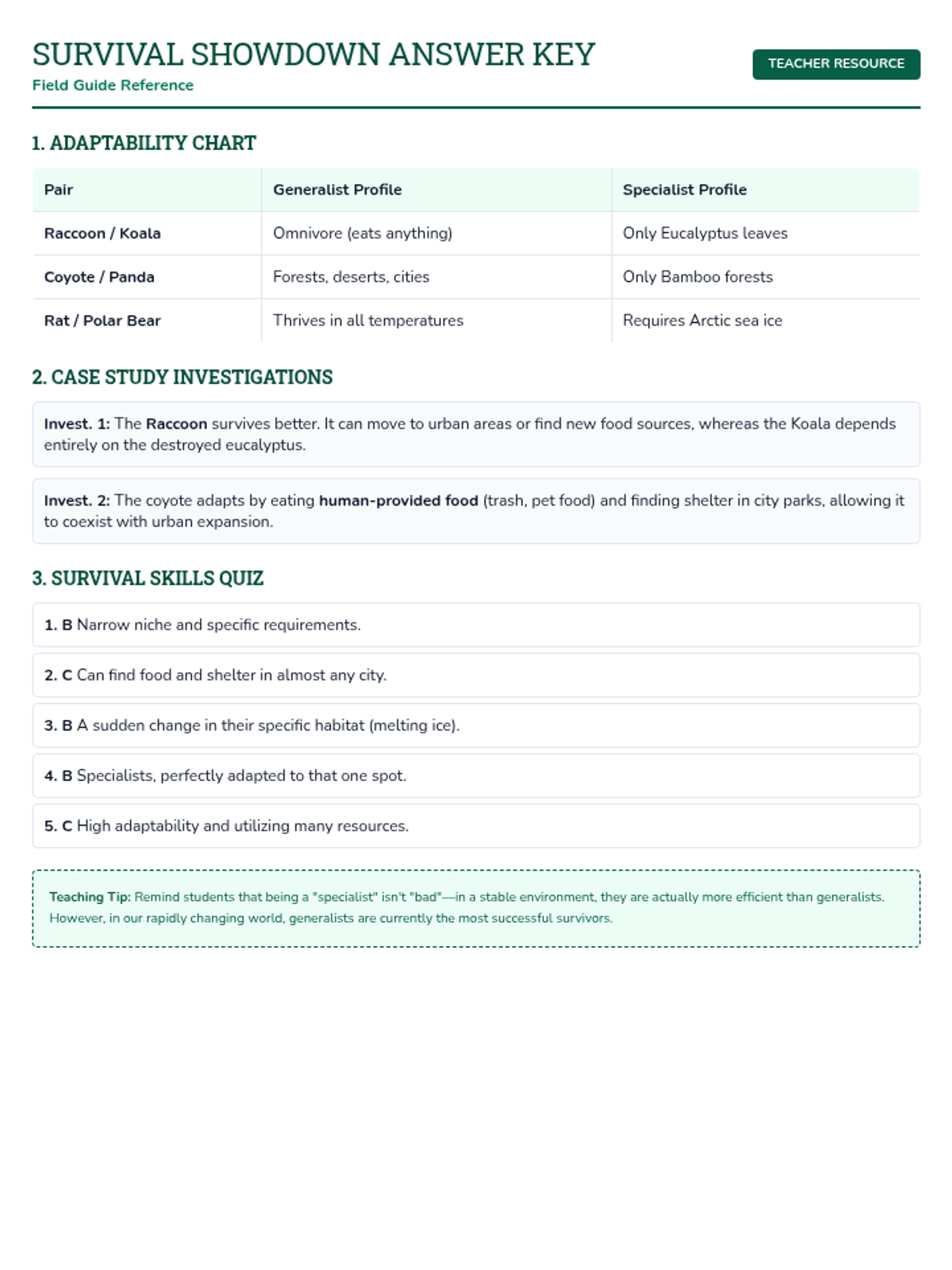
A lesson exploring the differences between generalist and specialist species, focusing on how their niches affect their survival and impact on ecosystems.
A comprehensive two-week version of the element research project for juniors, allowing for deeper dives into historical context and atomic modeling.
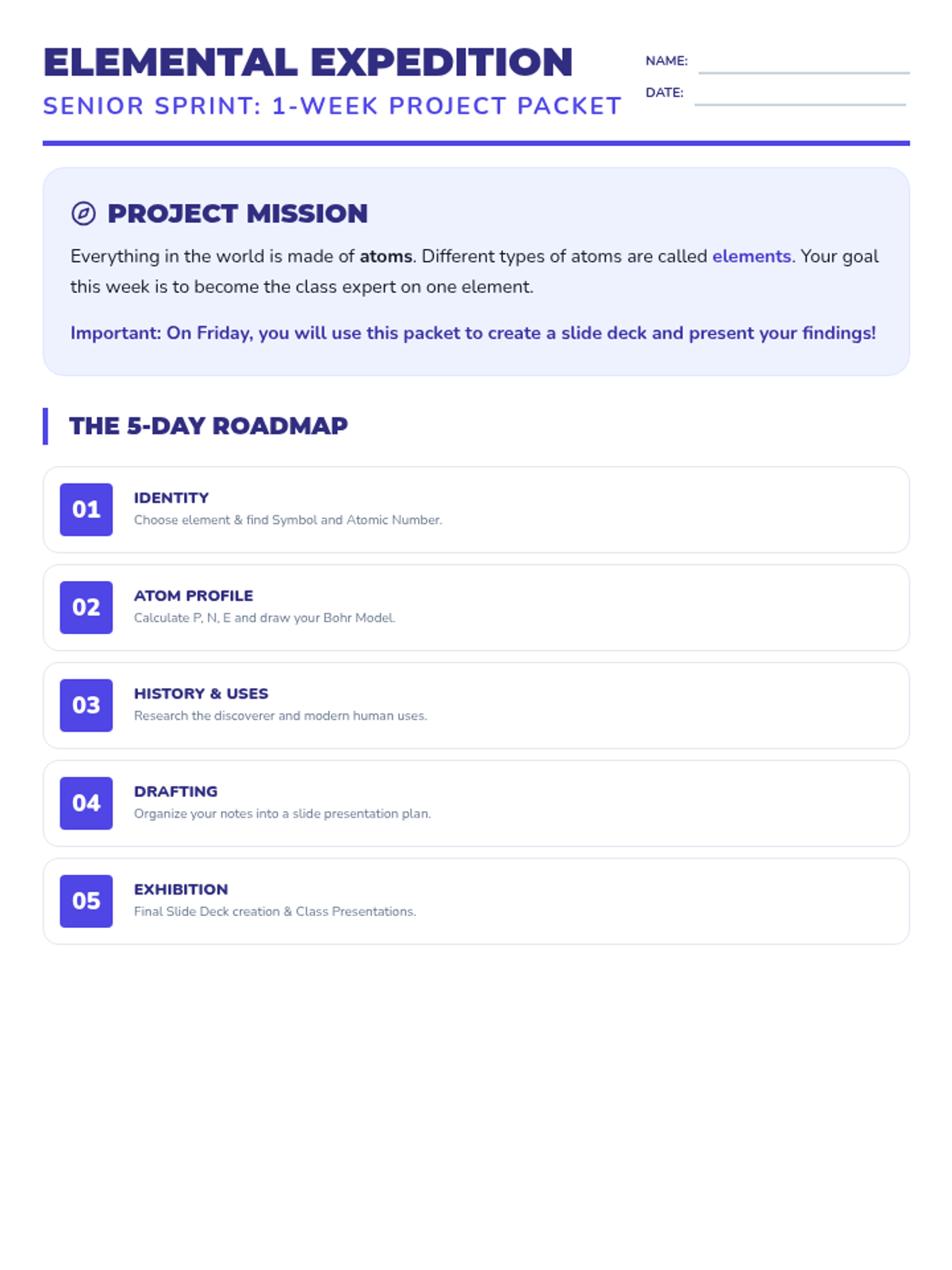
An accelerated one-week version of the element research project designed for seniors, focusing on core atomic data and primary uses.
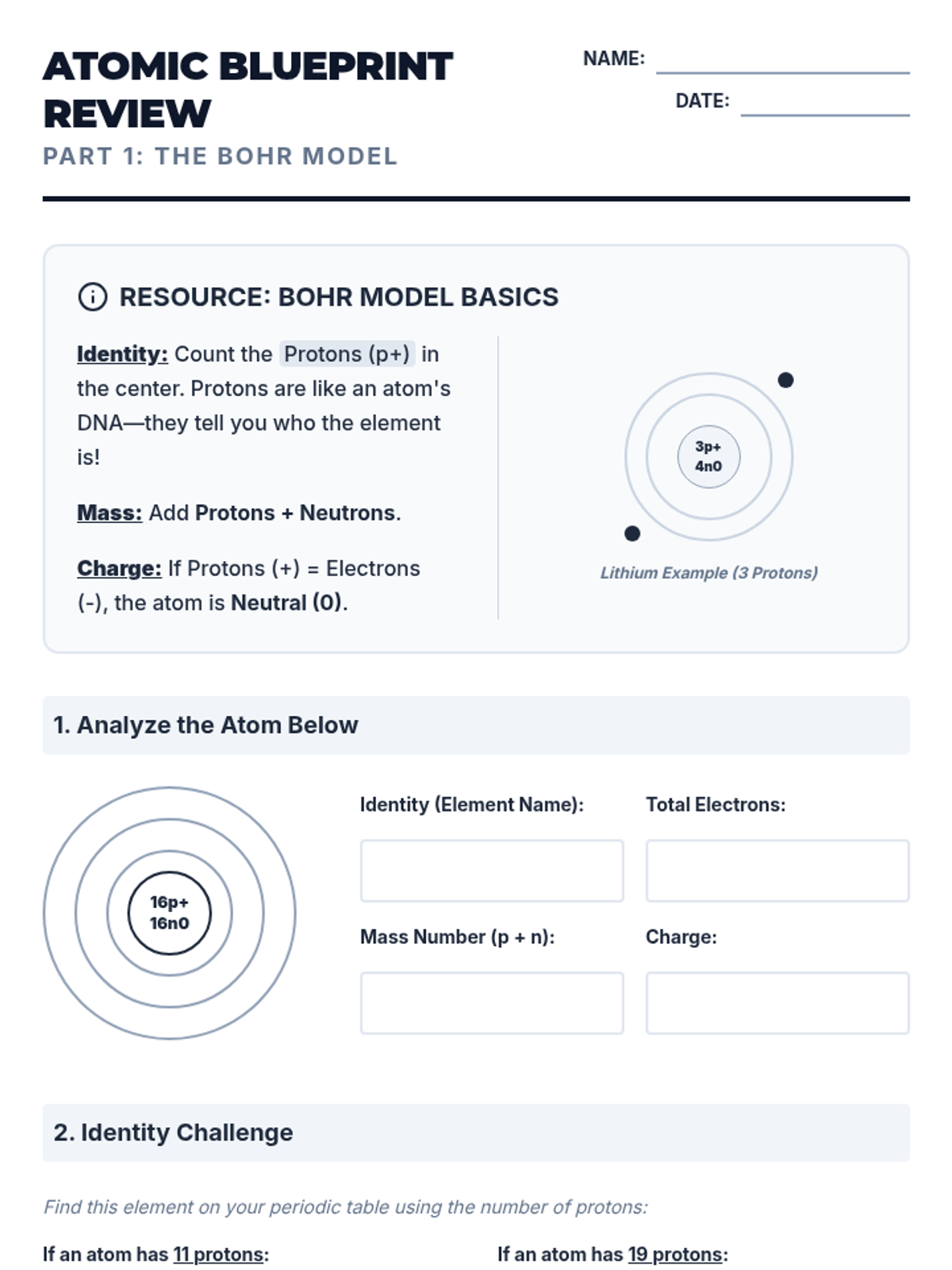
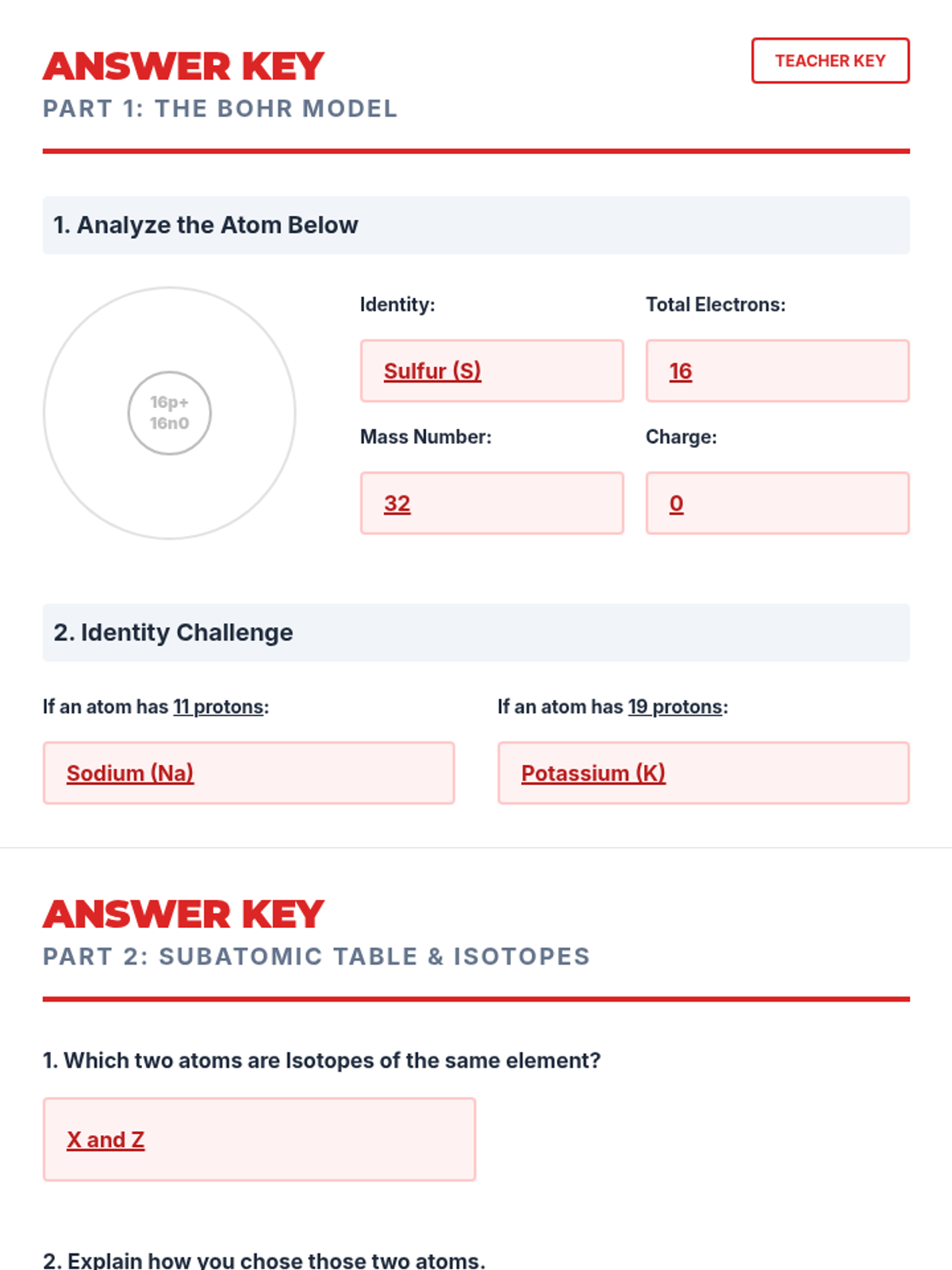
A comprehensive review sequence focusing on atomic structure, Bohr models, isotopes, and electron configurations designed for high school chemistry students.
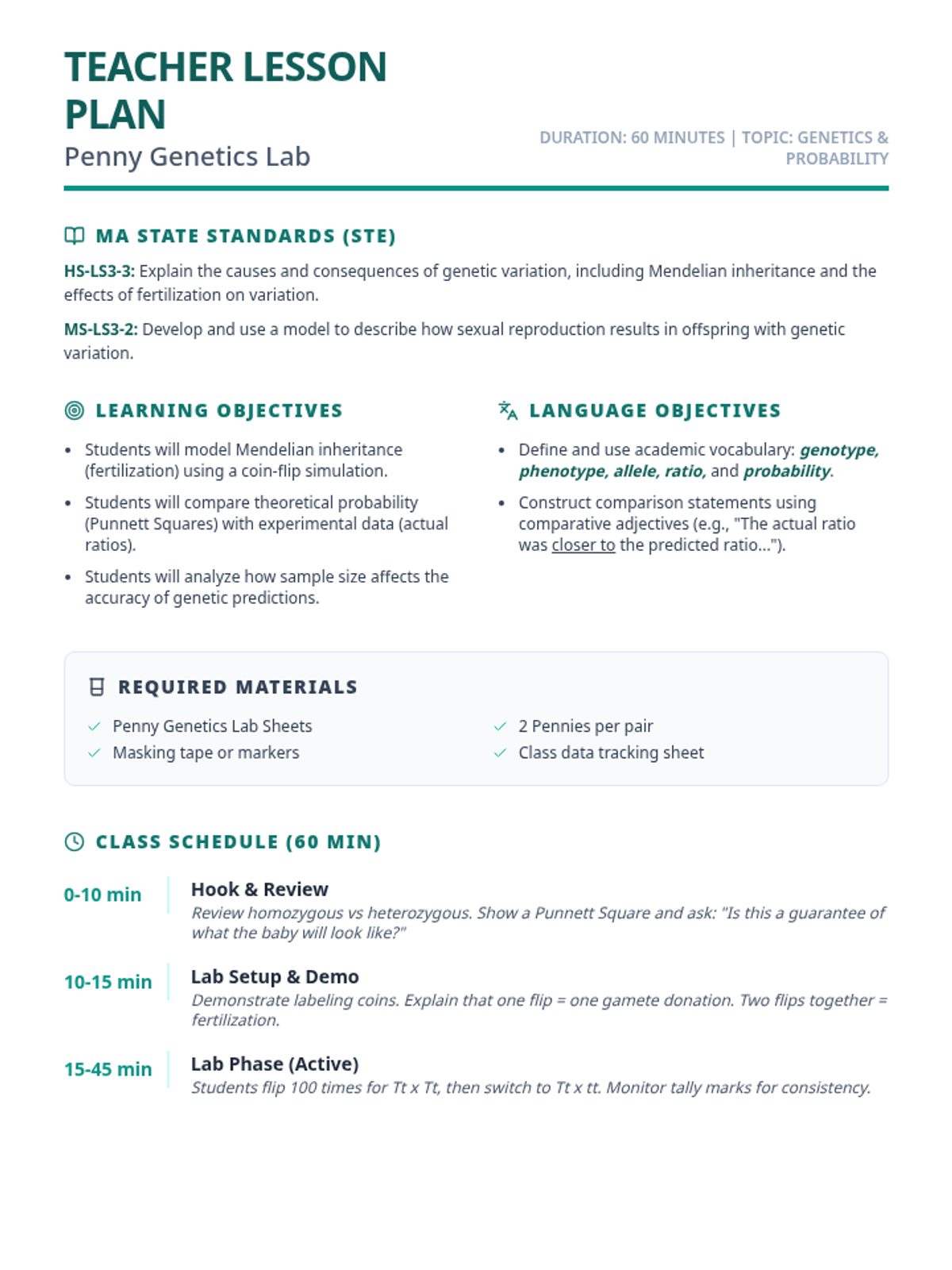
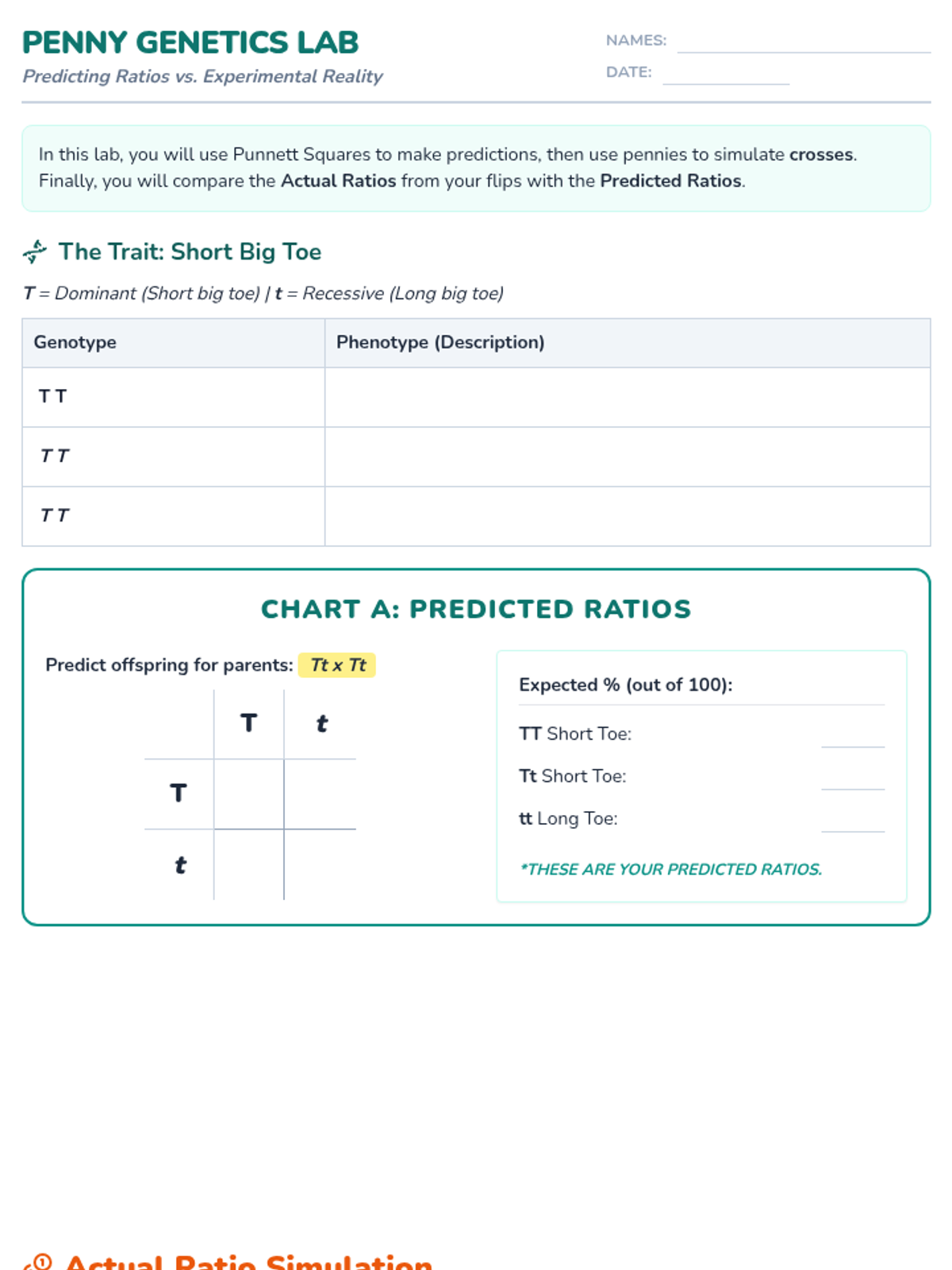
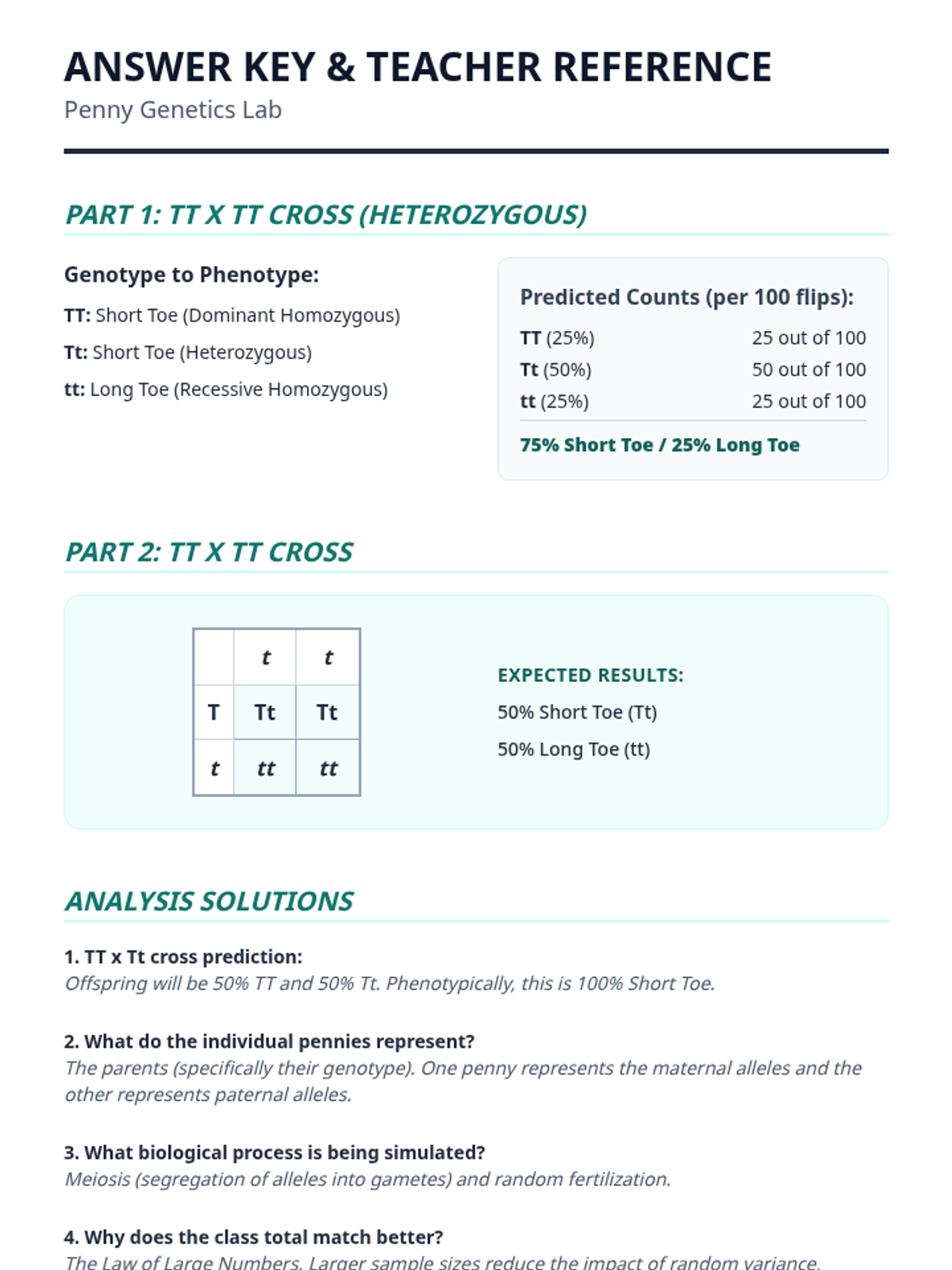
A 60-minute hands-on lab exploring the relationship between Punnett square predictions and actual genetic outcomes using coin-flip simulations. Students compare theoretical probability with experimental data to understand how fertilization works.
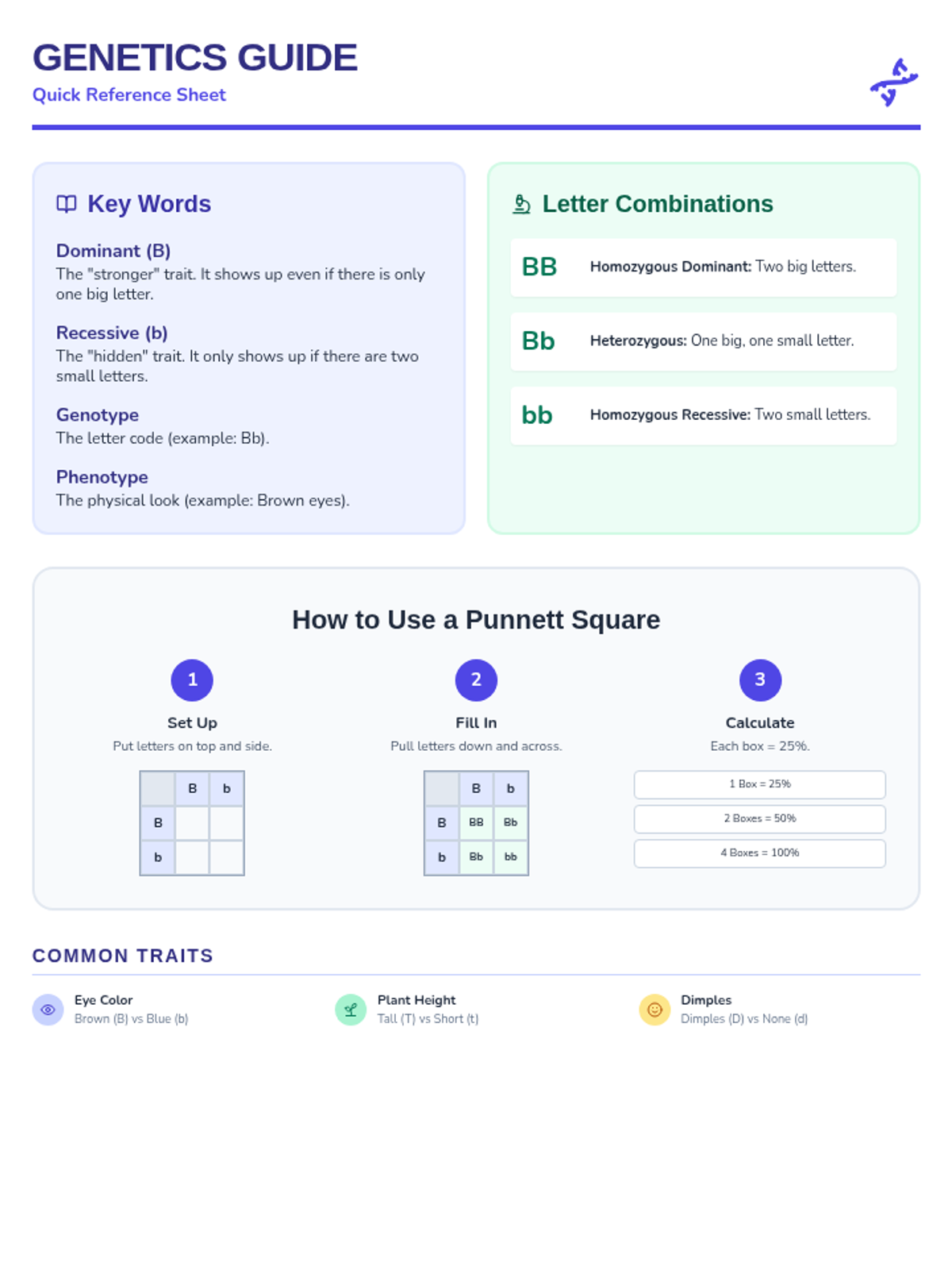
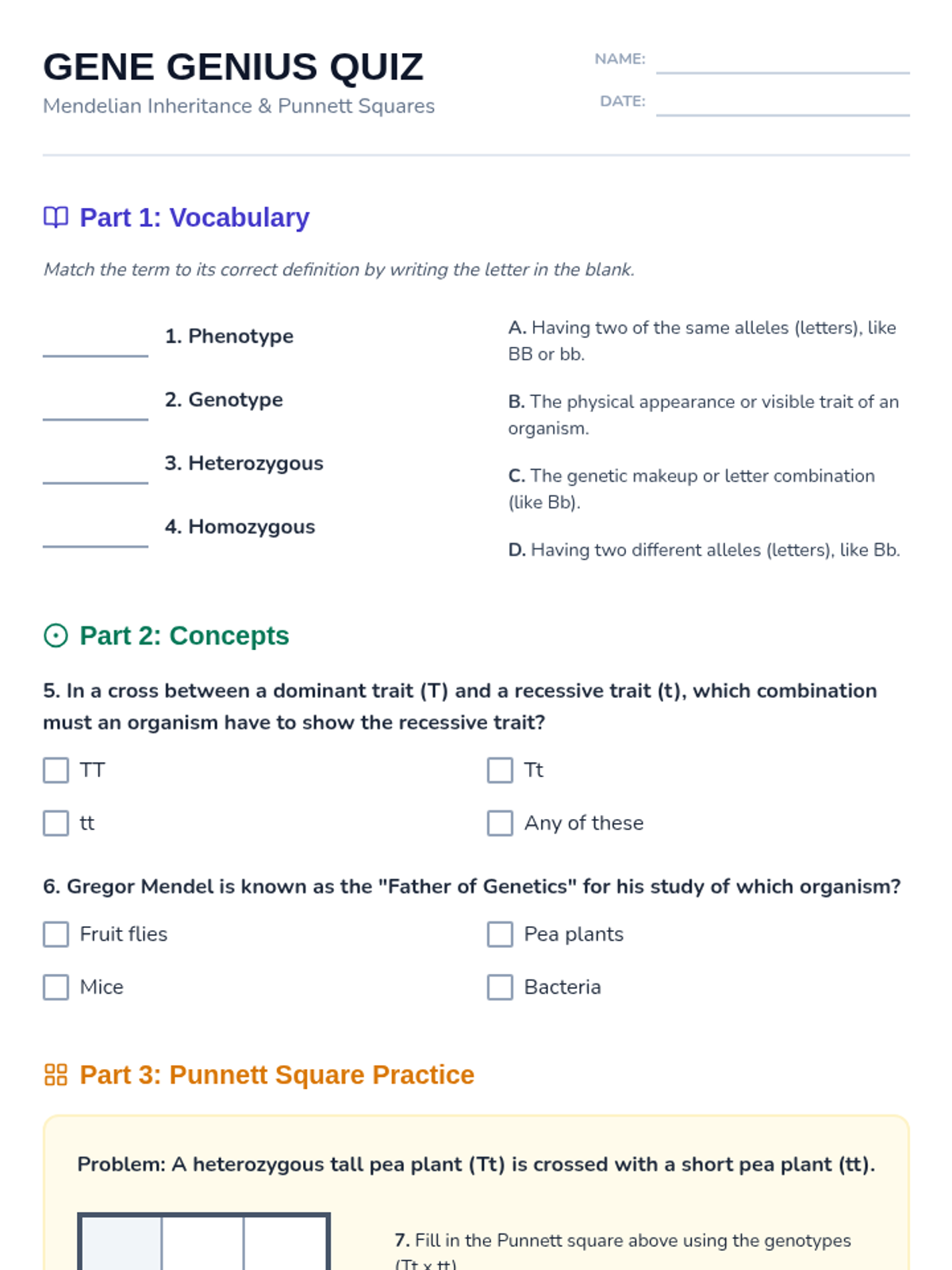
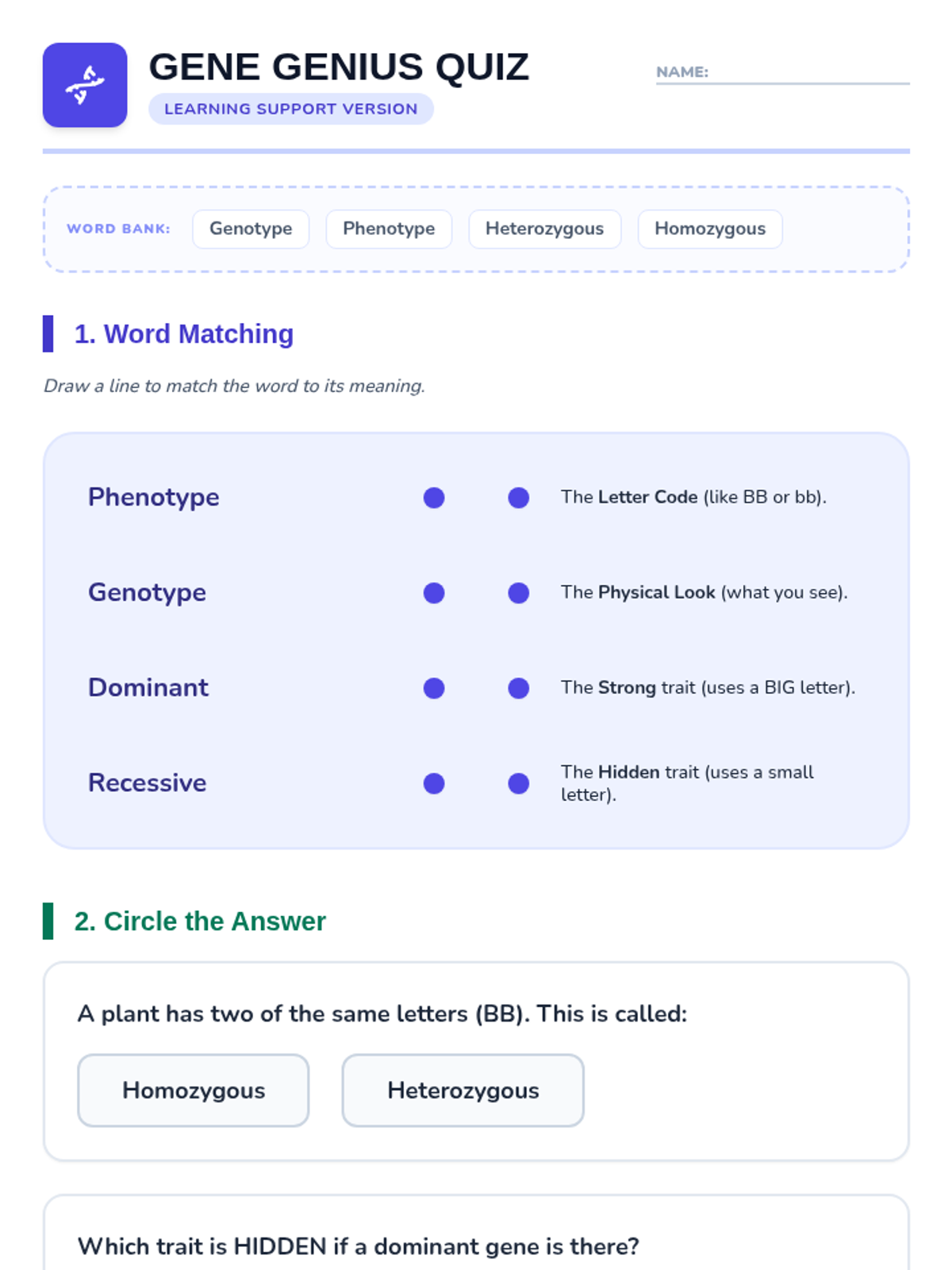
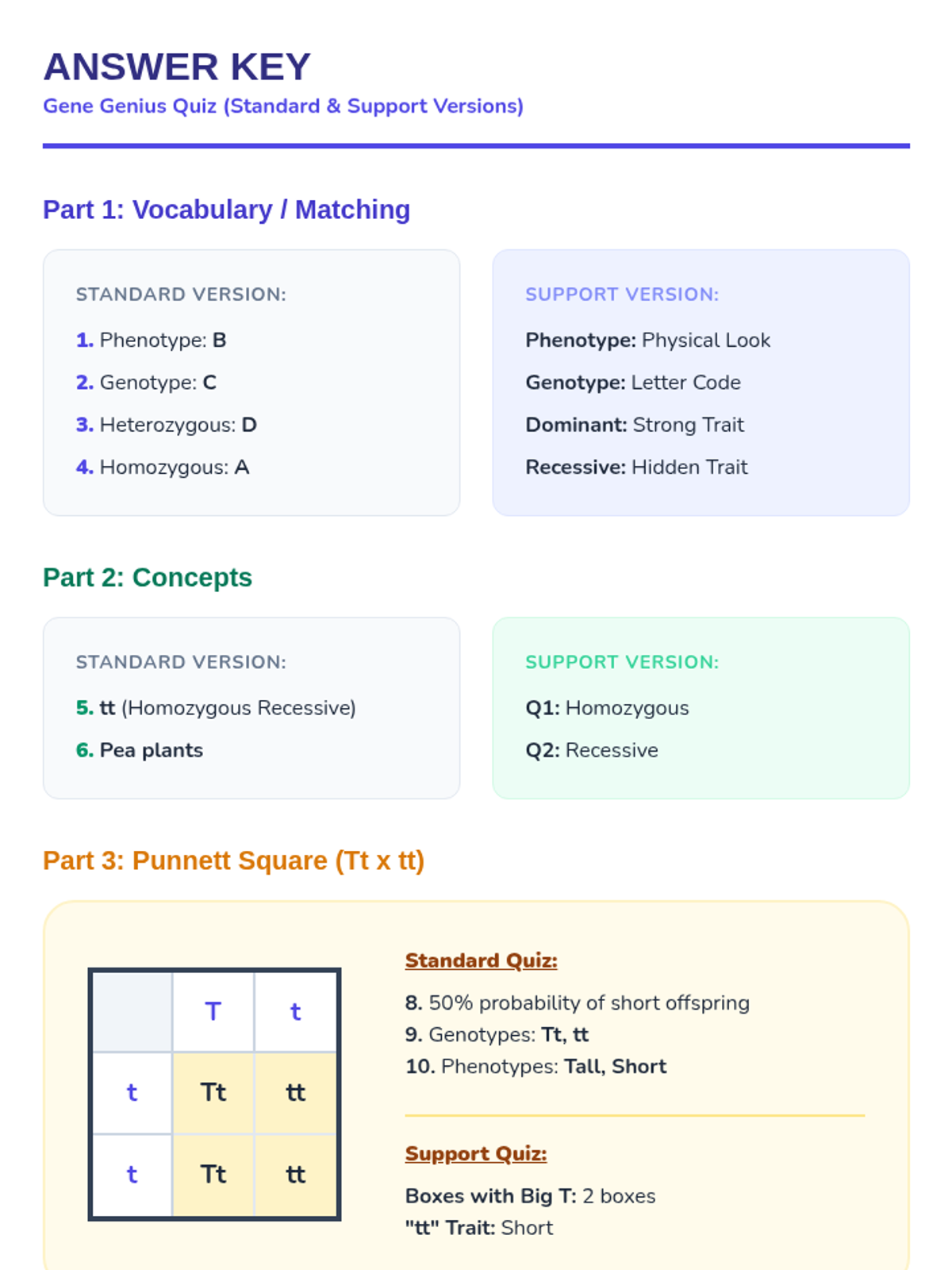
A focused lesson on Mendelian inheritance and Punnett squares, featuring visual-heavy materials and differentiated assessments for varying learner needs.
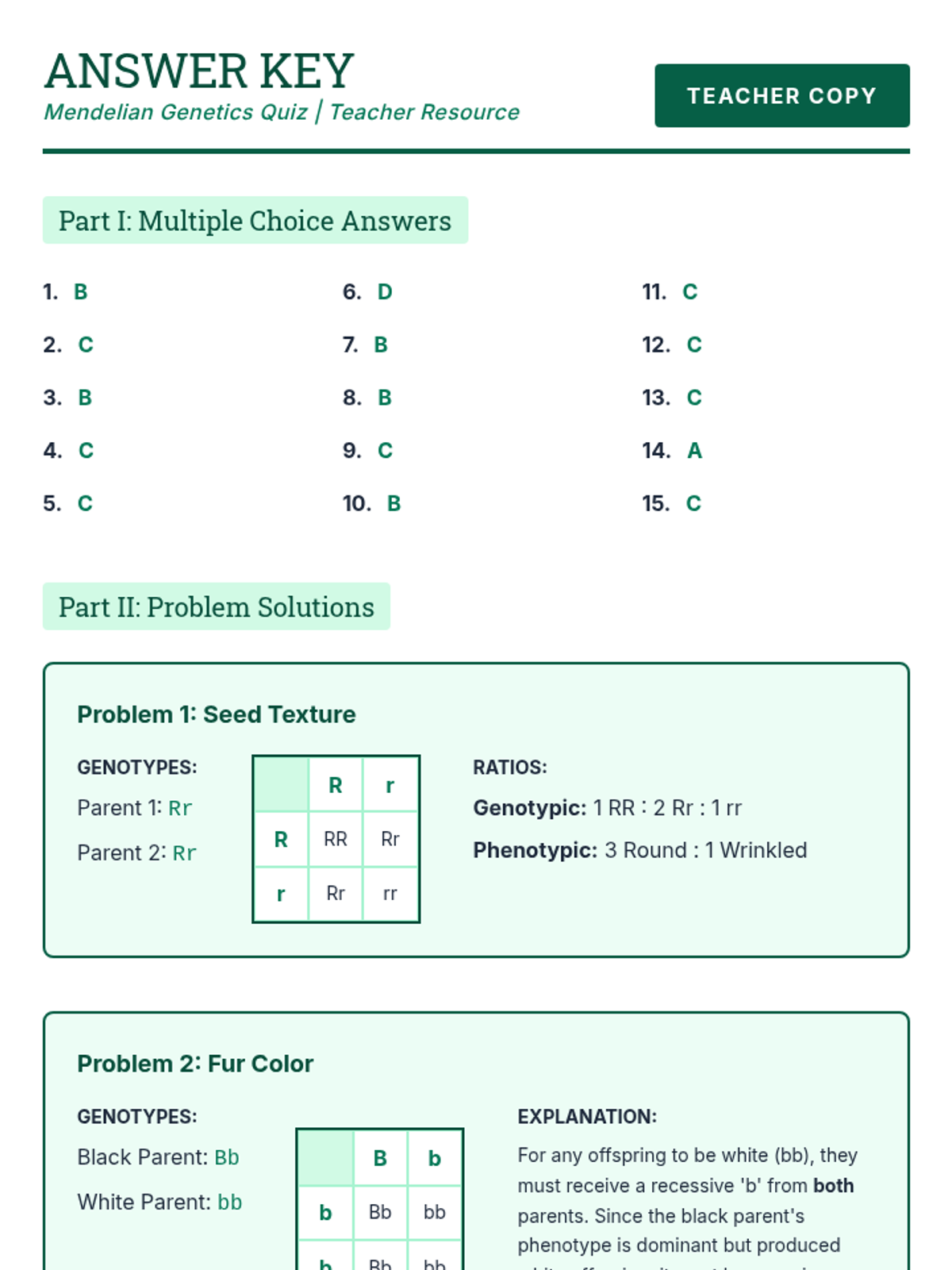
A rigorous assessment on the principles of Mendelian inheritance, covering monohybrid crosses, terminology, and probability ratios for honors biology students.
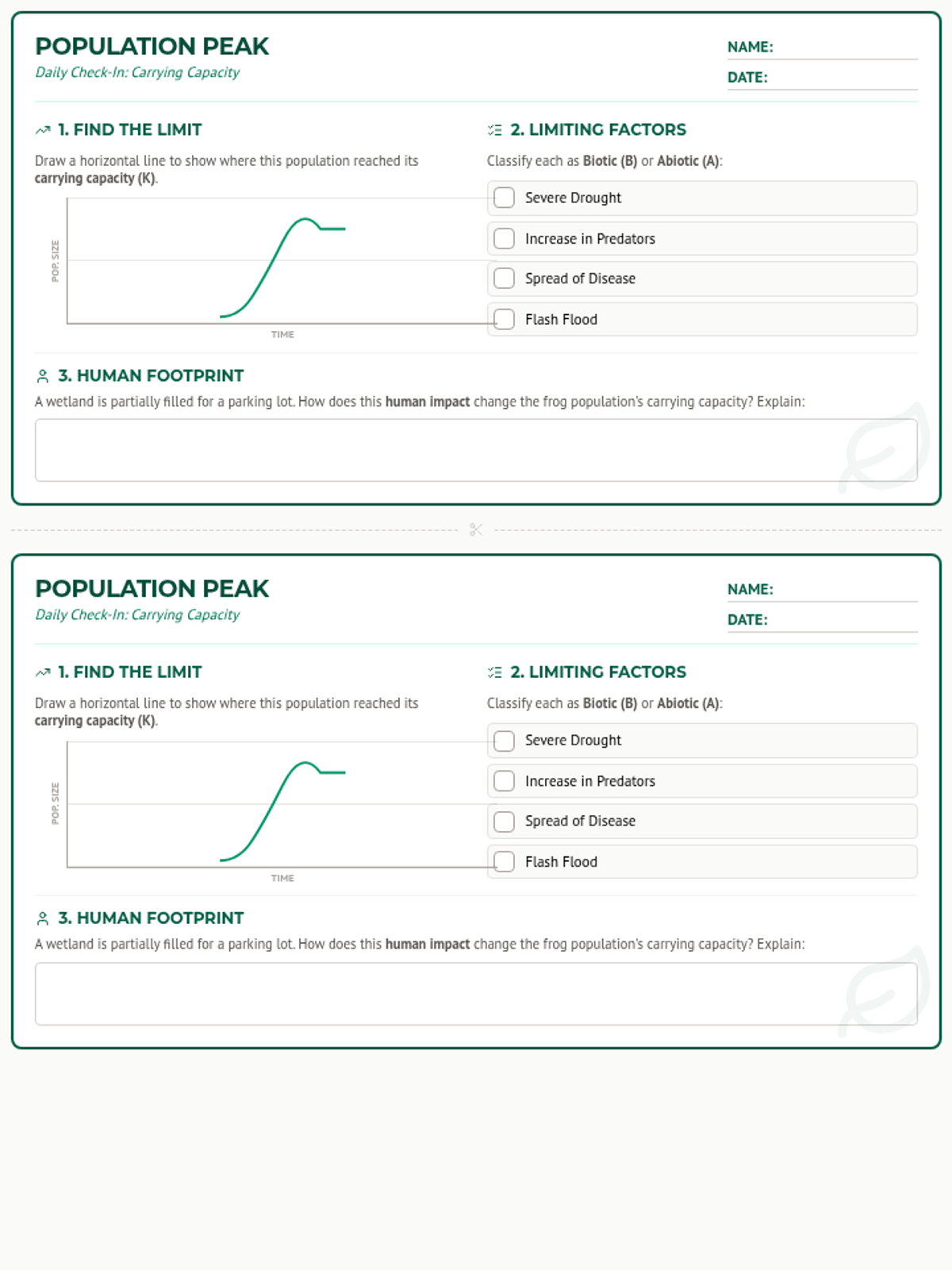
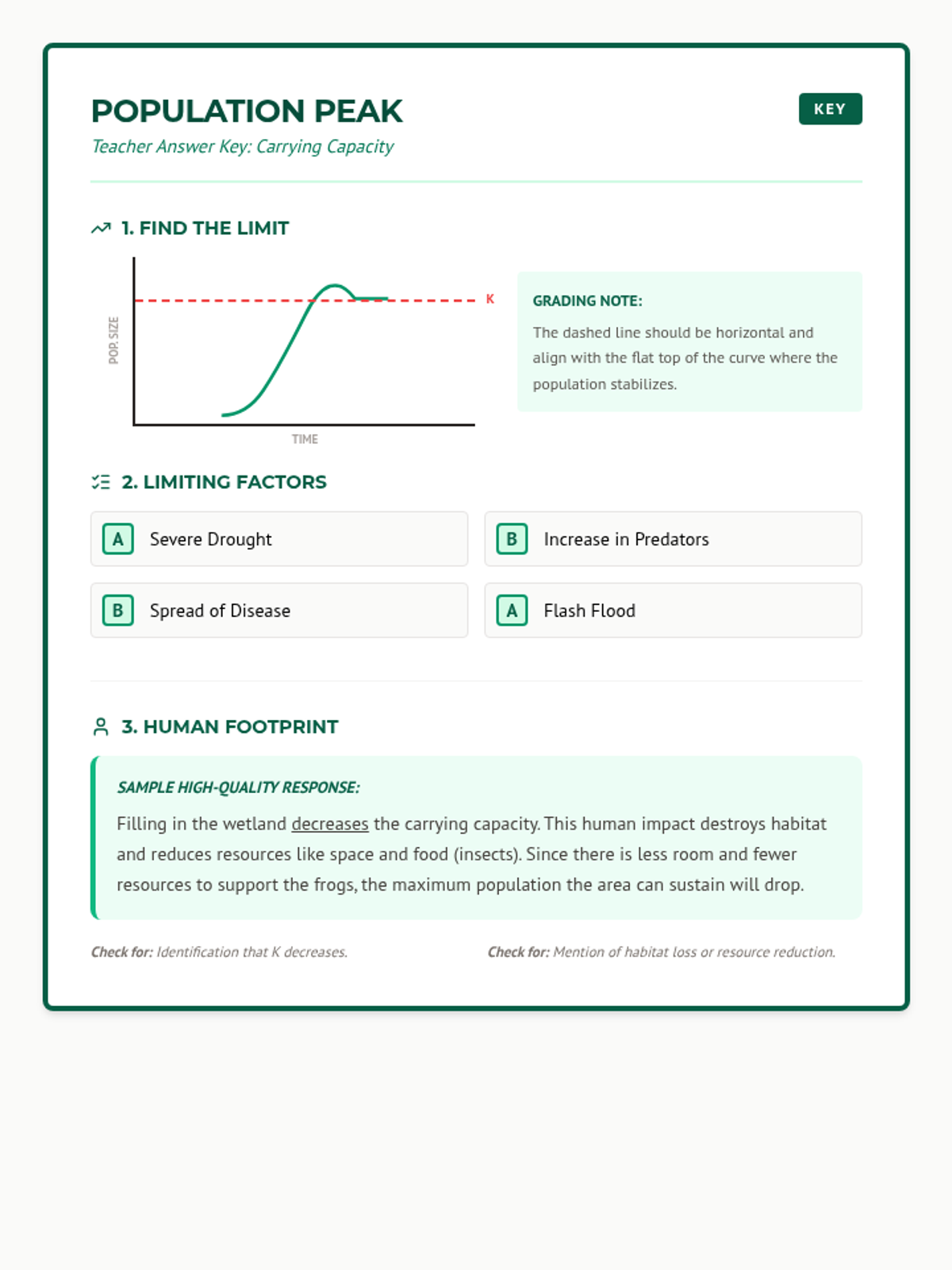
A quick review session focused on population carrying capacity, identifying biotic and abiotic limiting factors, and examining human environmental impacts. Includes a visual presentation for review and printable assessment tools.
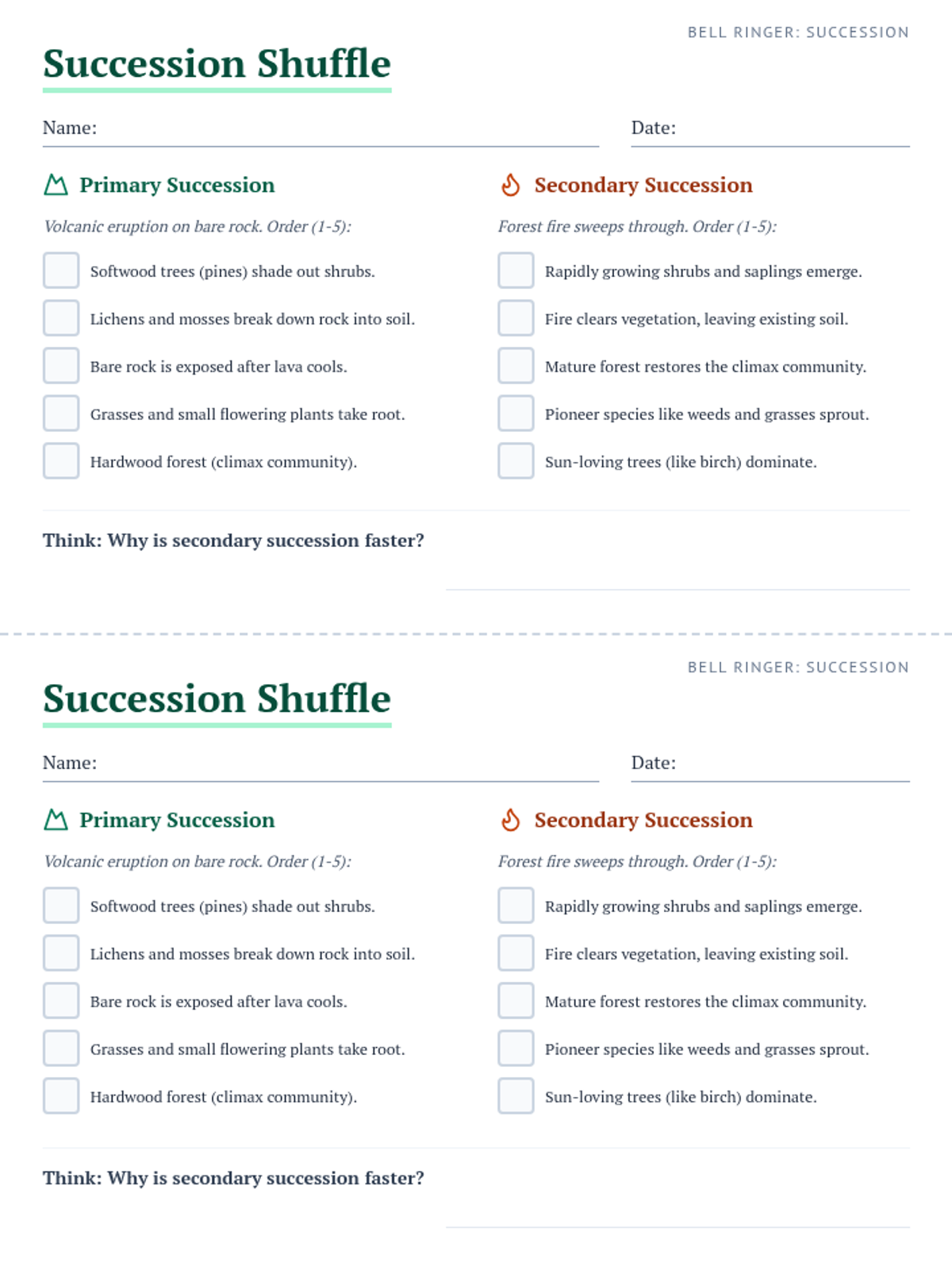
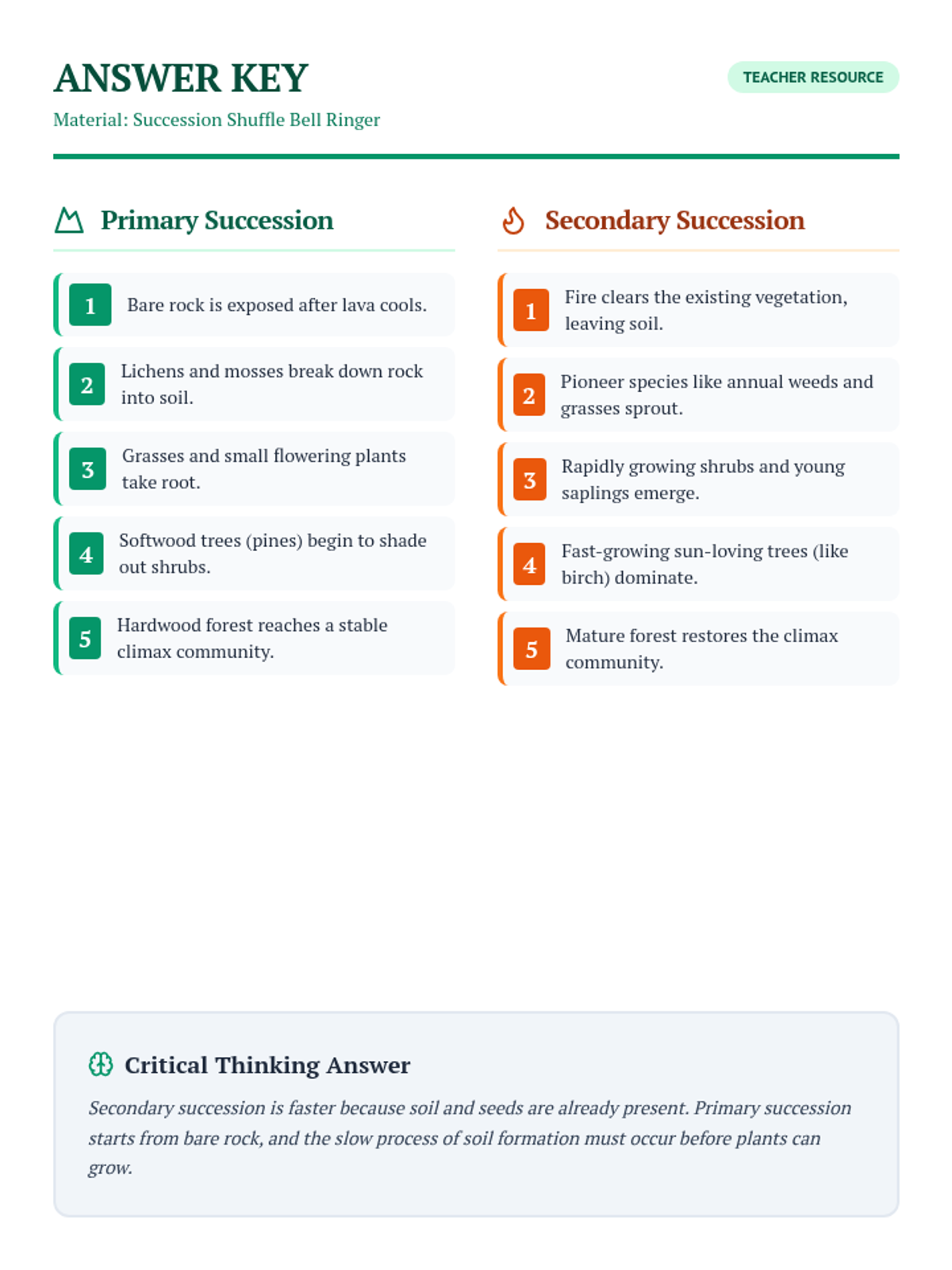
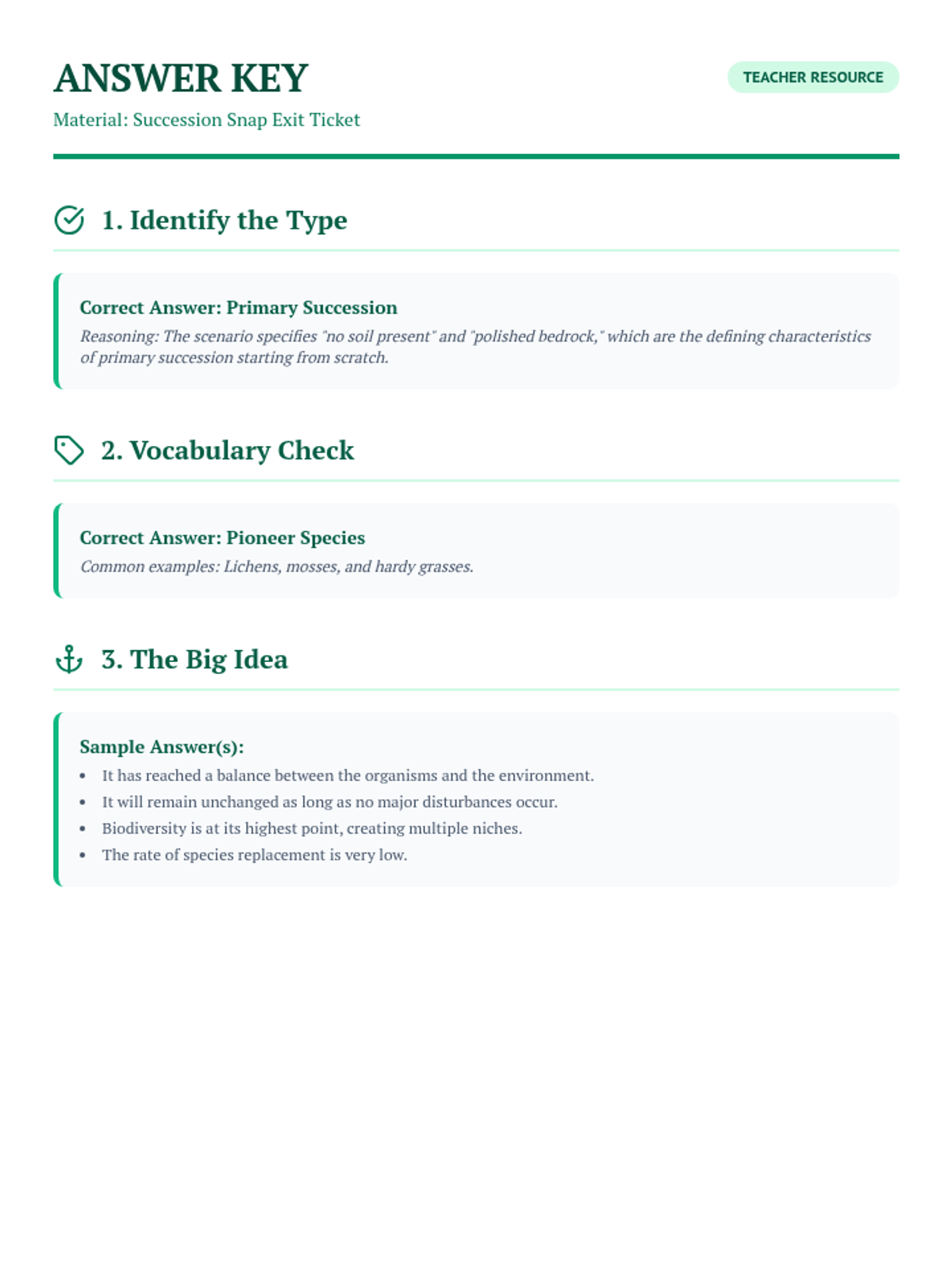
A quick, engaging bell ringer activity designed to review the stages of primary and secondary ecological succession through a sequence ordering task.
Explore the survival strategies of generalist and specialist species through case studies of raccoons, koalas, pandas, and more. Students analyze diet, habitat, and adaptability to understand how different species thrive or struggle in changing environments.
A focused reading comprehension lesson exploring the lives of ants, designed with clear structure and visual supports for 1st-2nd grade students.
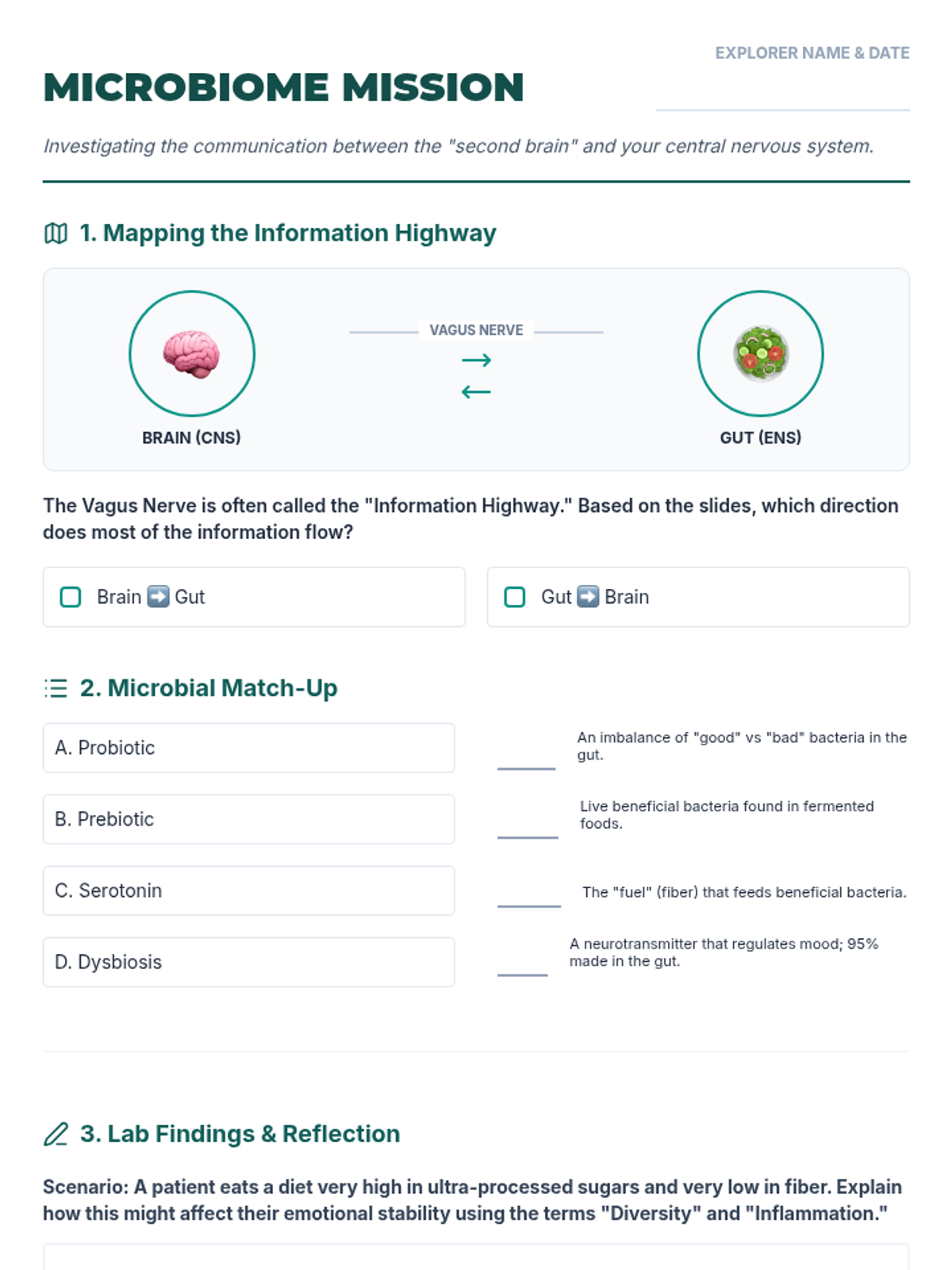
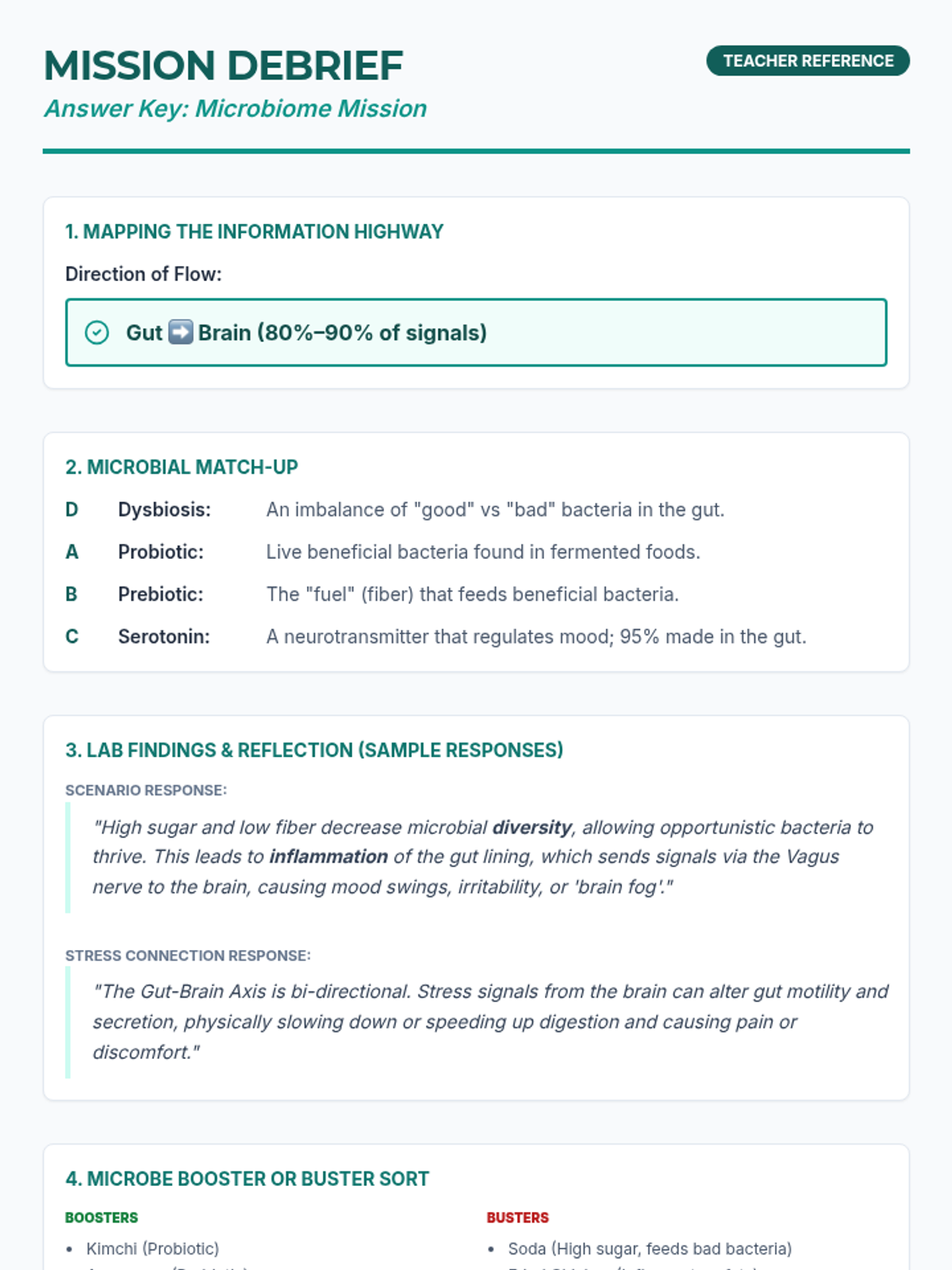
A comprehensive lesson exploring the gut-brain axis and how the microbiome influences mental health, neurotransmitter production, and emotional well-being.
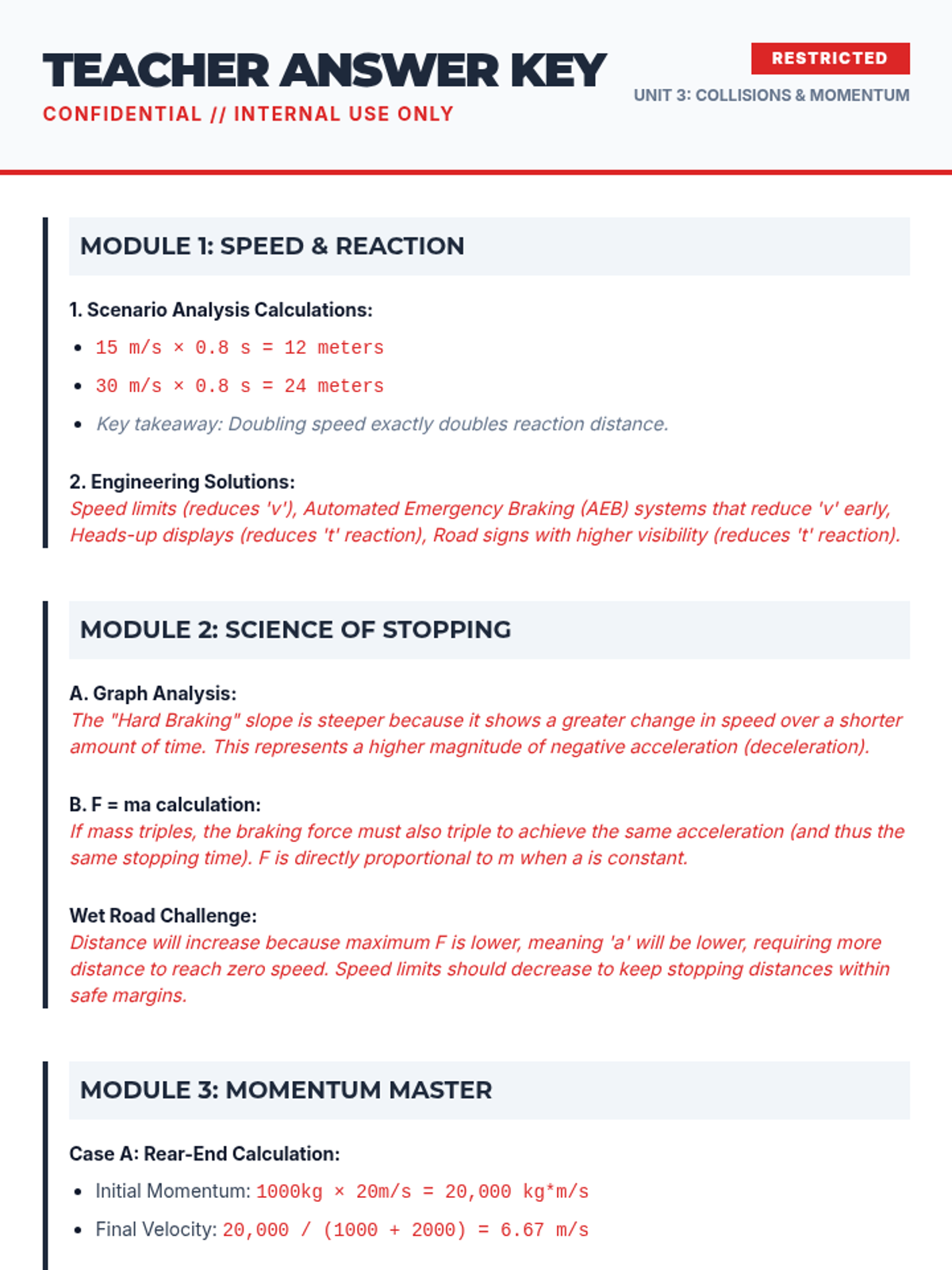
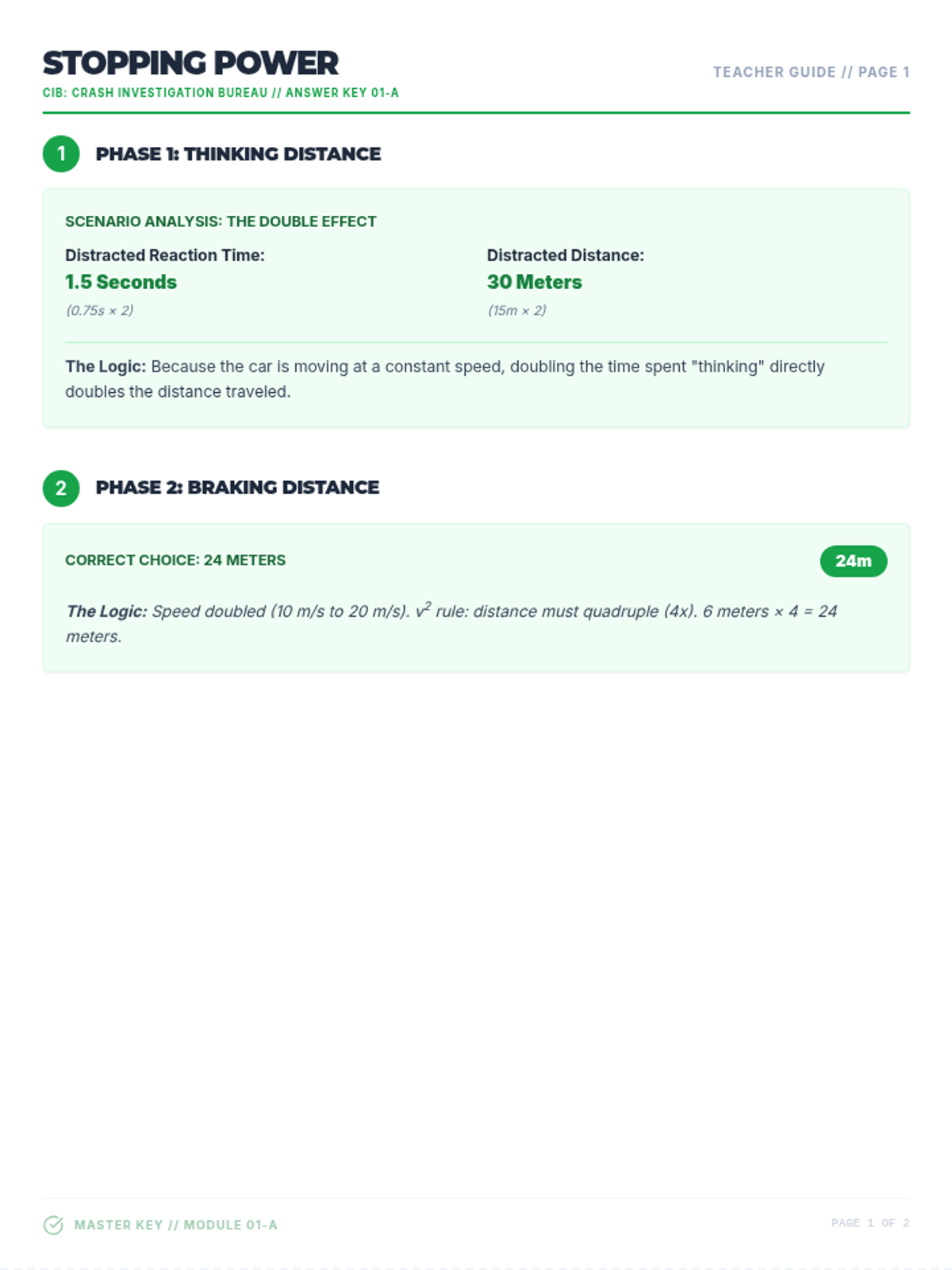
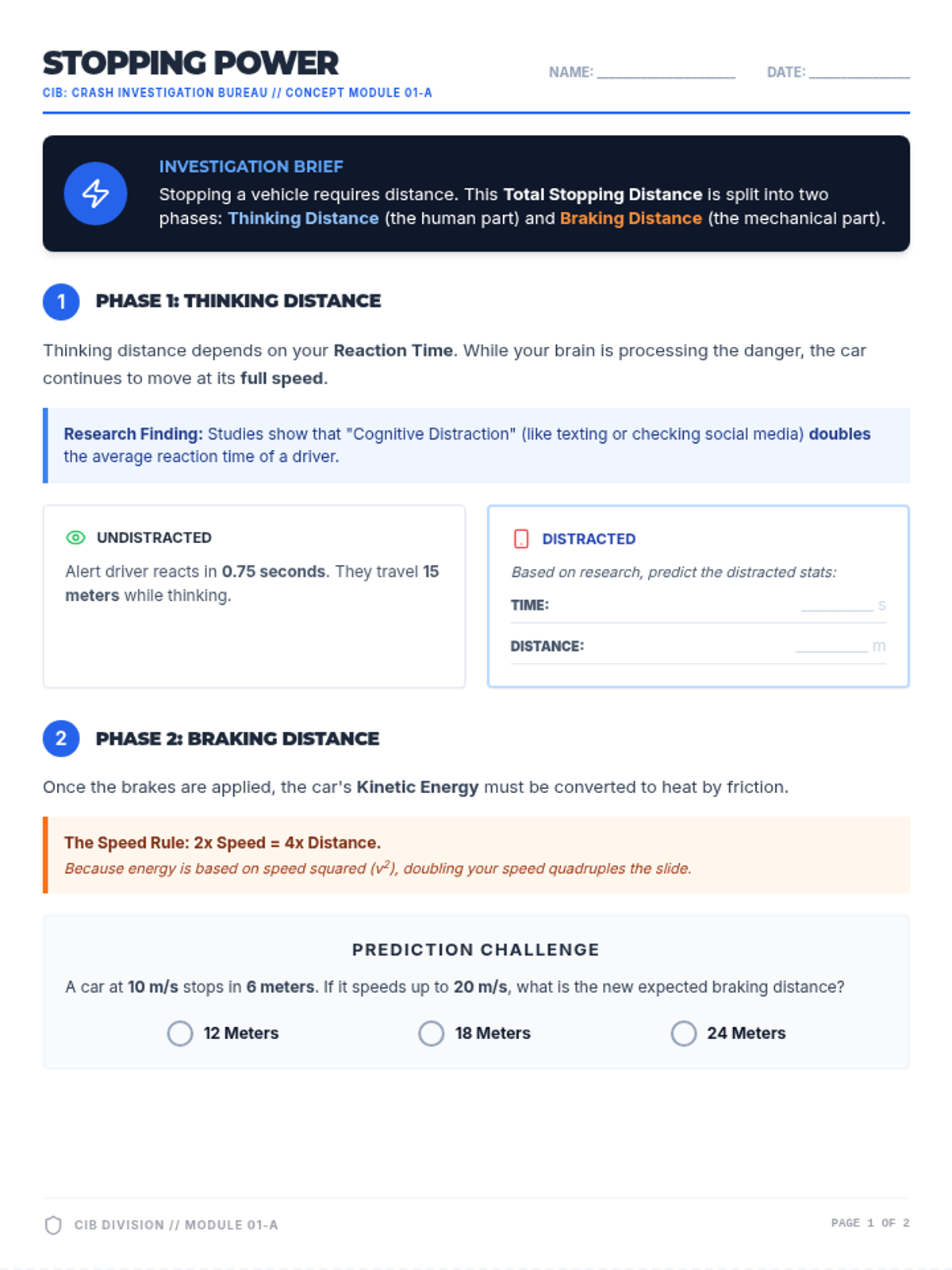
A series of independent modules covering mathematical models of reaction distance, braking forces, momentum conservation, and safety engineering.
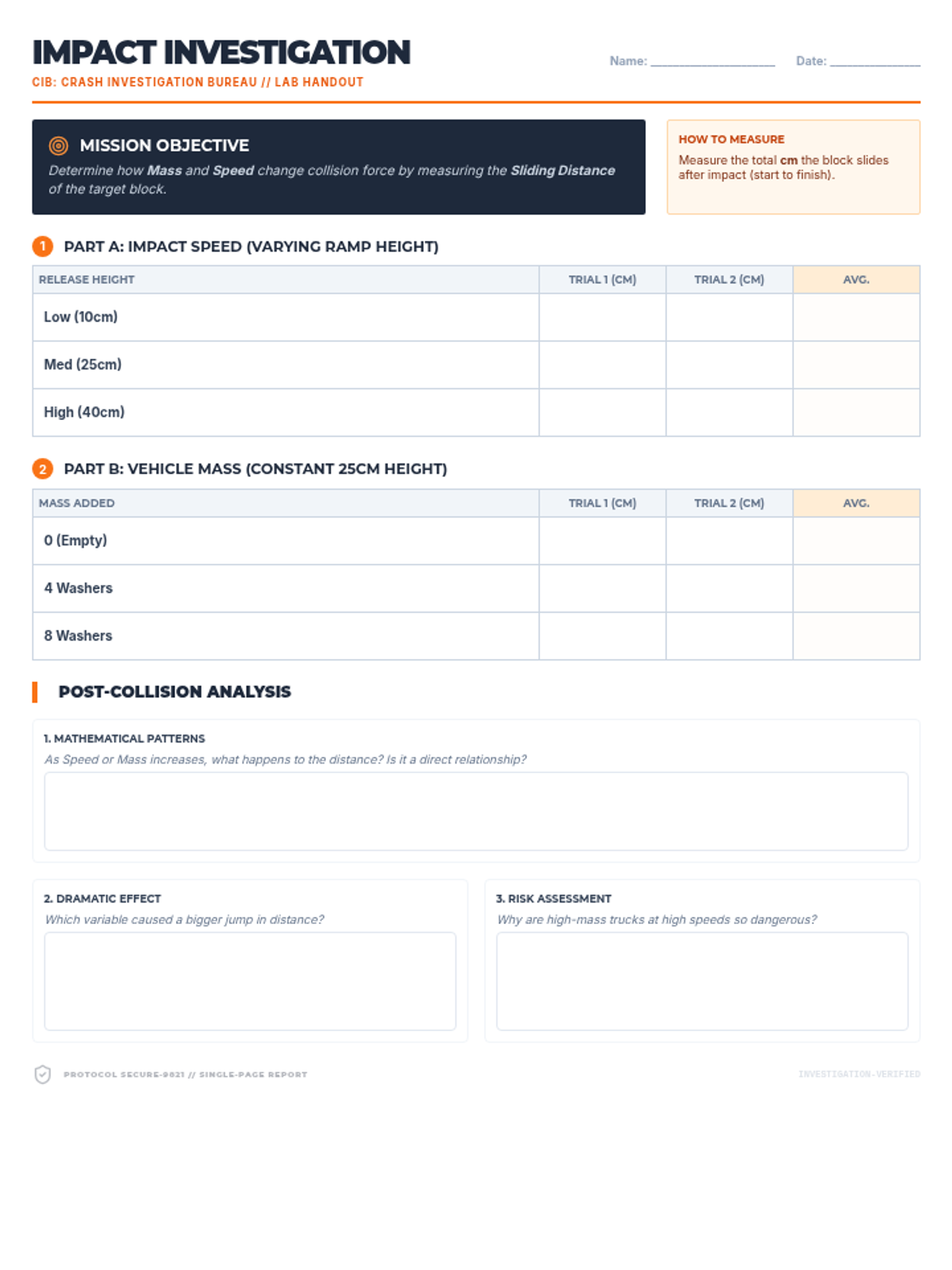
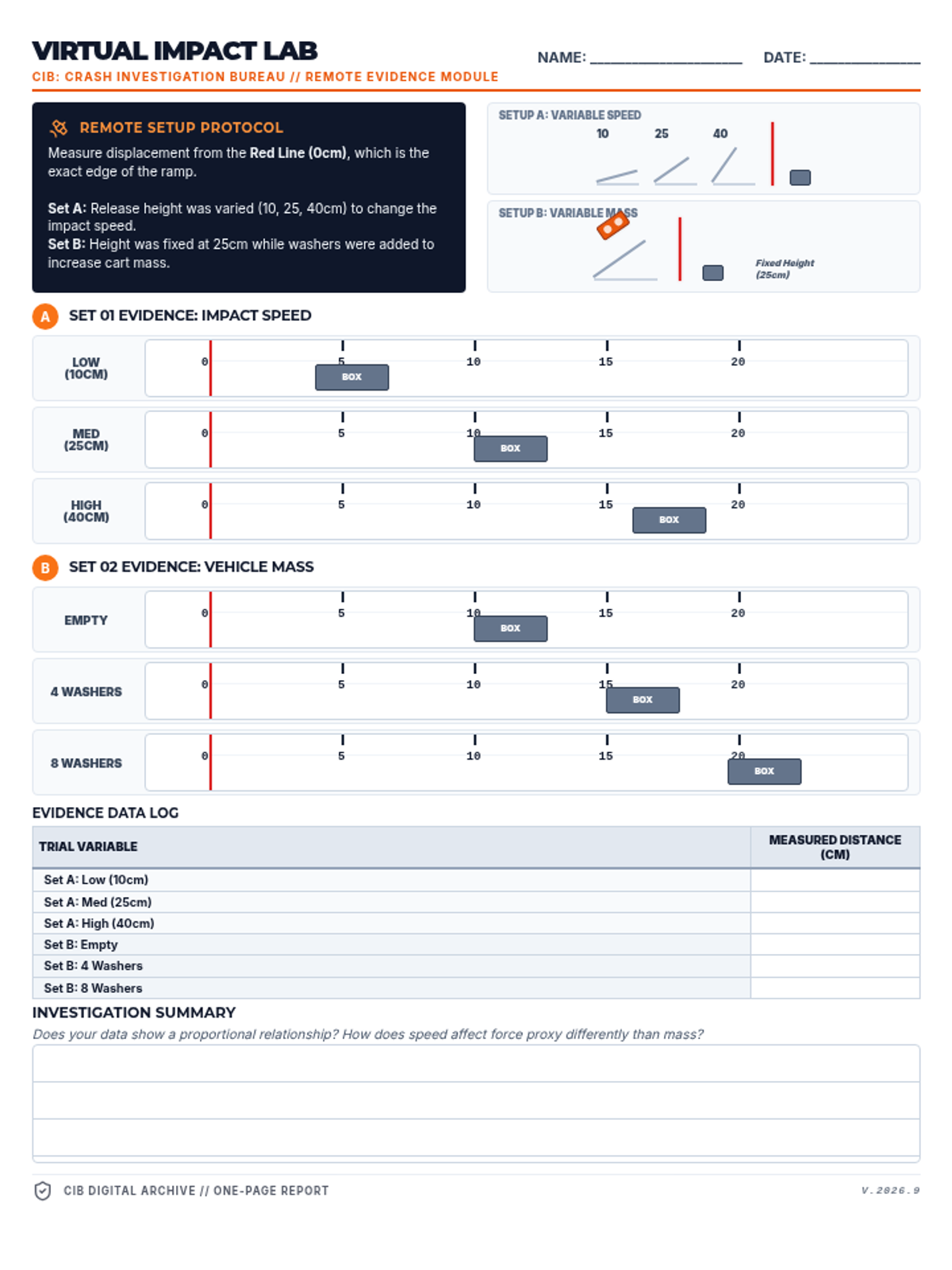
A hands-on interactive session where students investigate the relationship between mass, speed, and impact force using ramps and sliding targets.
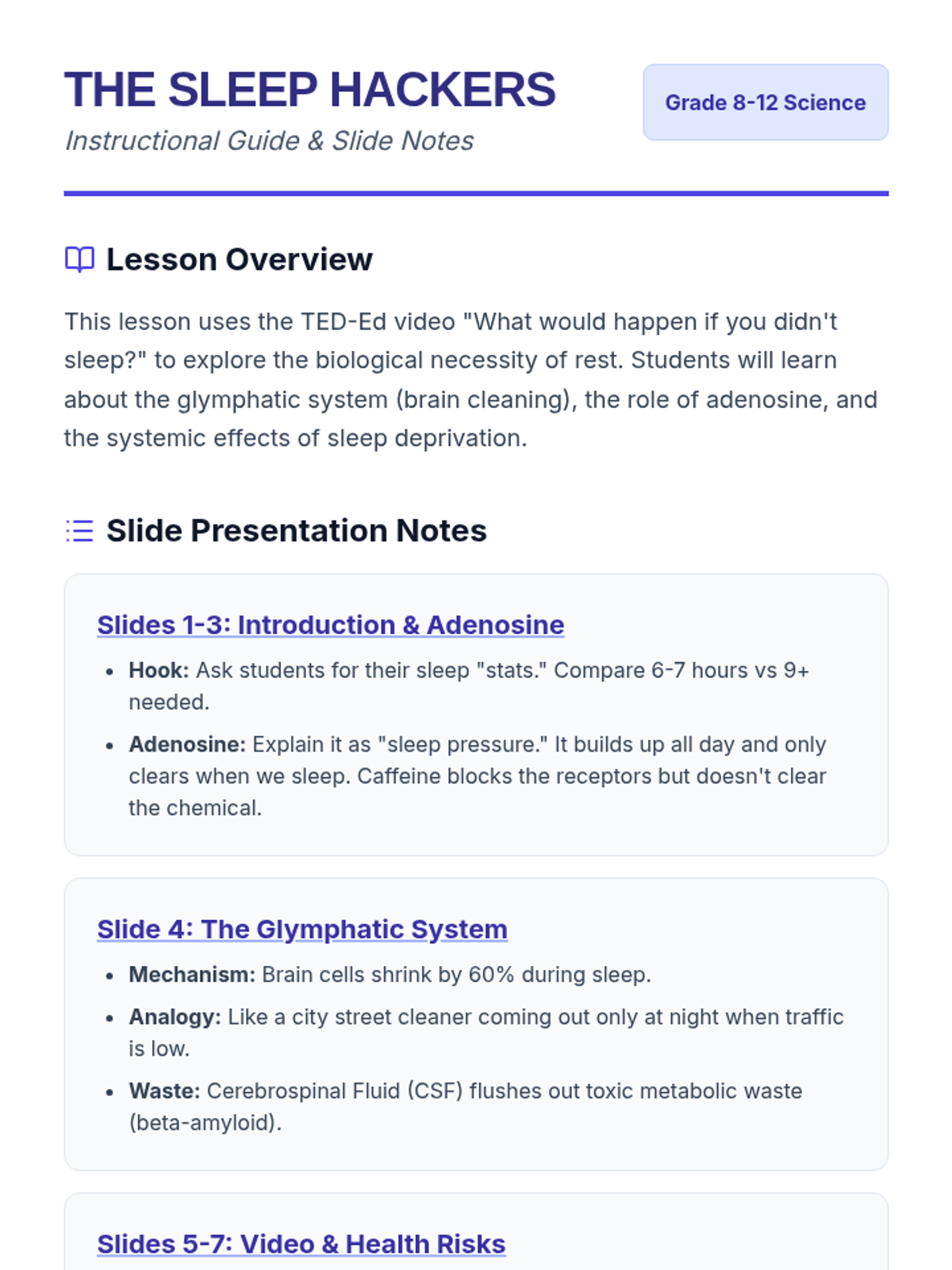
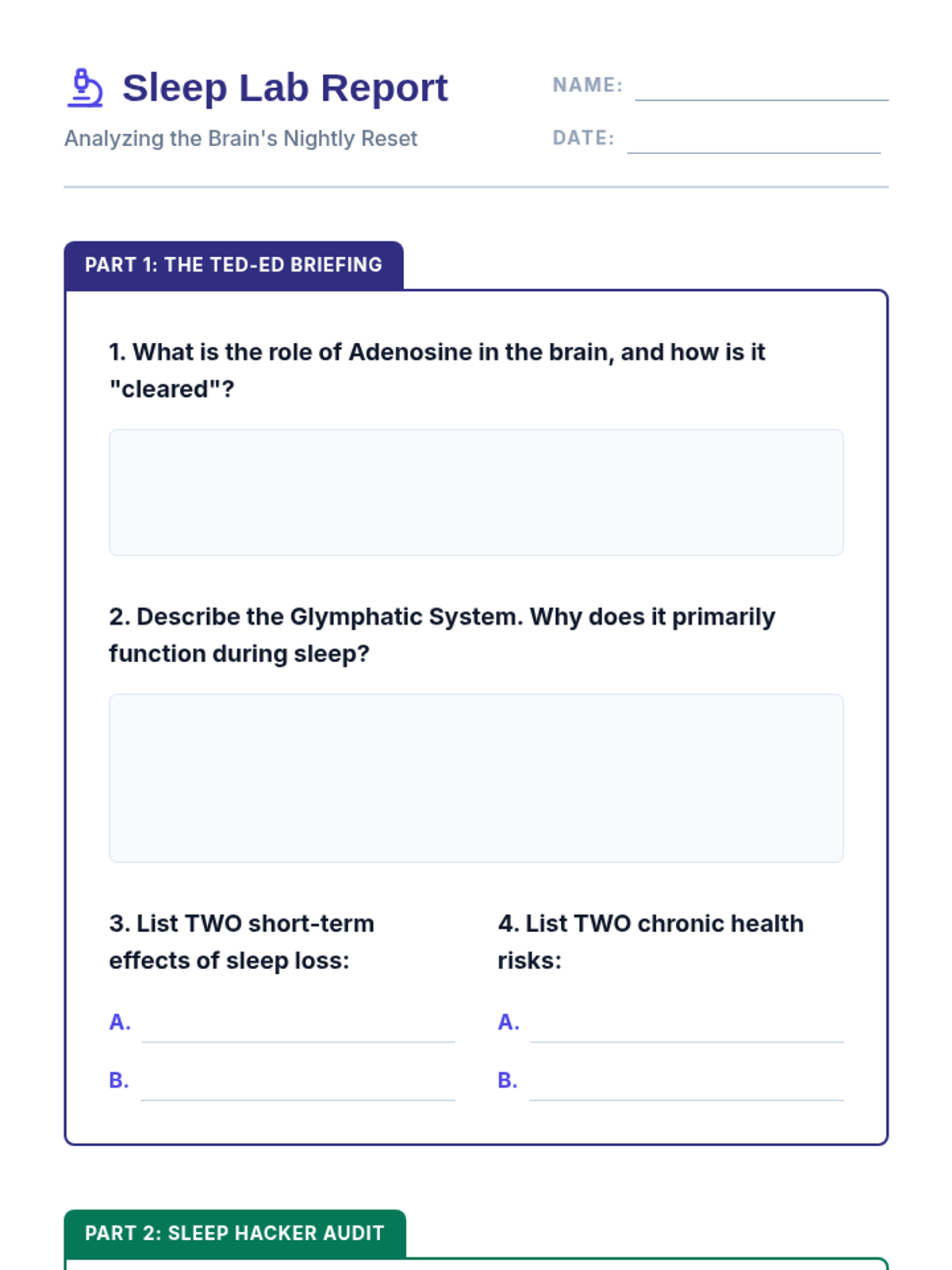
An exploration of the biological necessity of sleep, the mechanics of how the brain cleans itself during rest, and the physiological consequences of sleep deprivation.