Fundamental concepts of limits, derivatives, and integrals for modeling change and motion. Examines techniques for differentiation and integration alongside applications in optimization, area calculation, and differential equations.
An advanced introduction to the metric tensor and non-Euclidean geometry, serving as a primer for General Relativity.
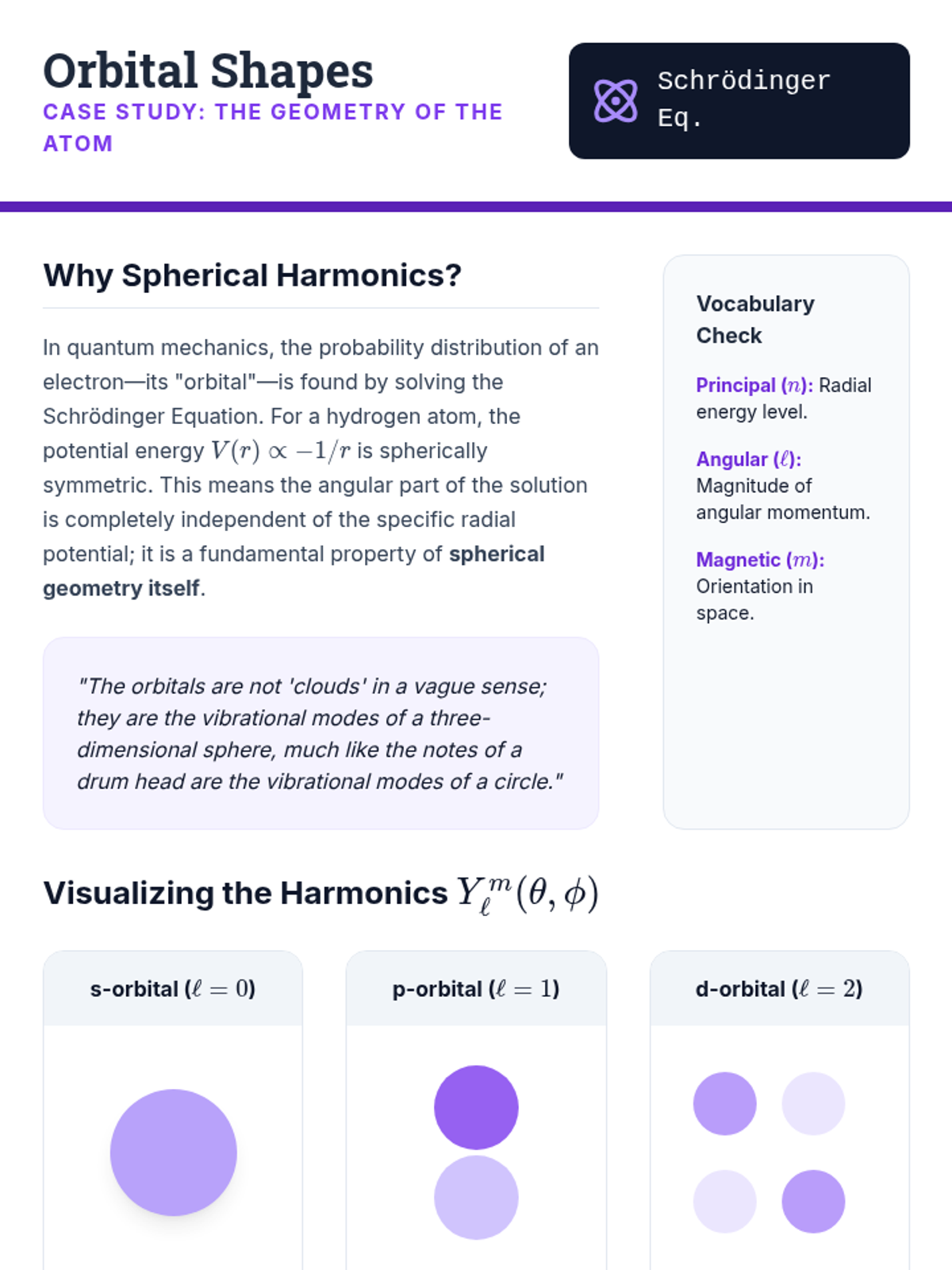
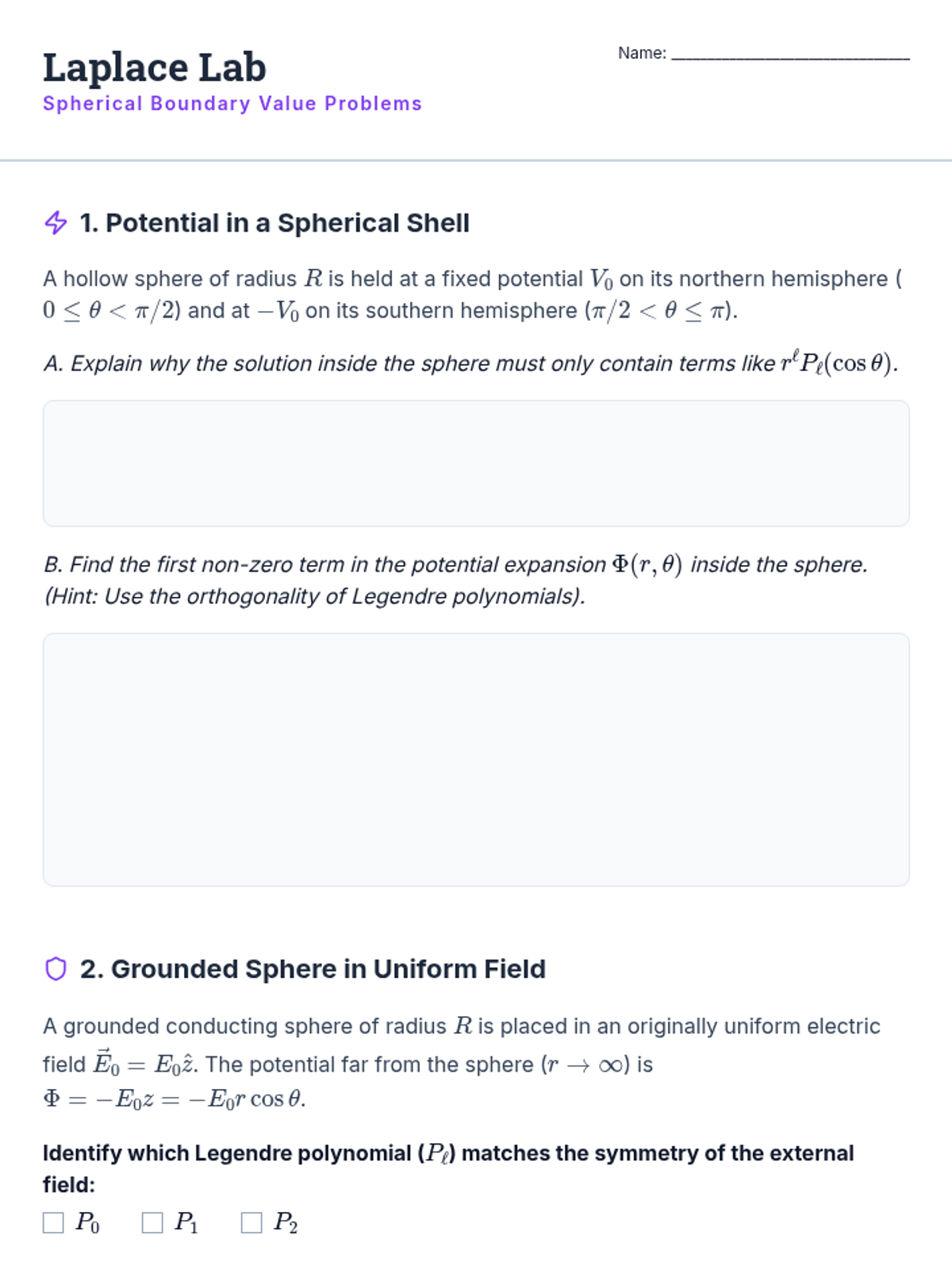
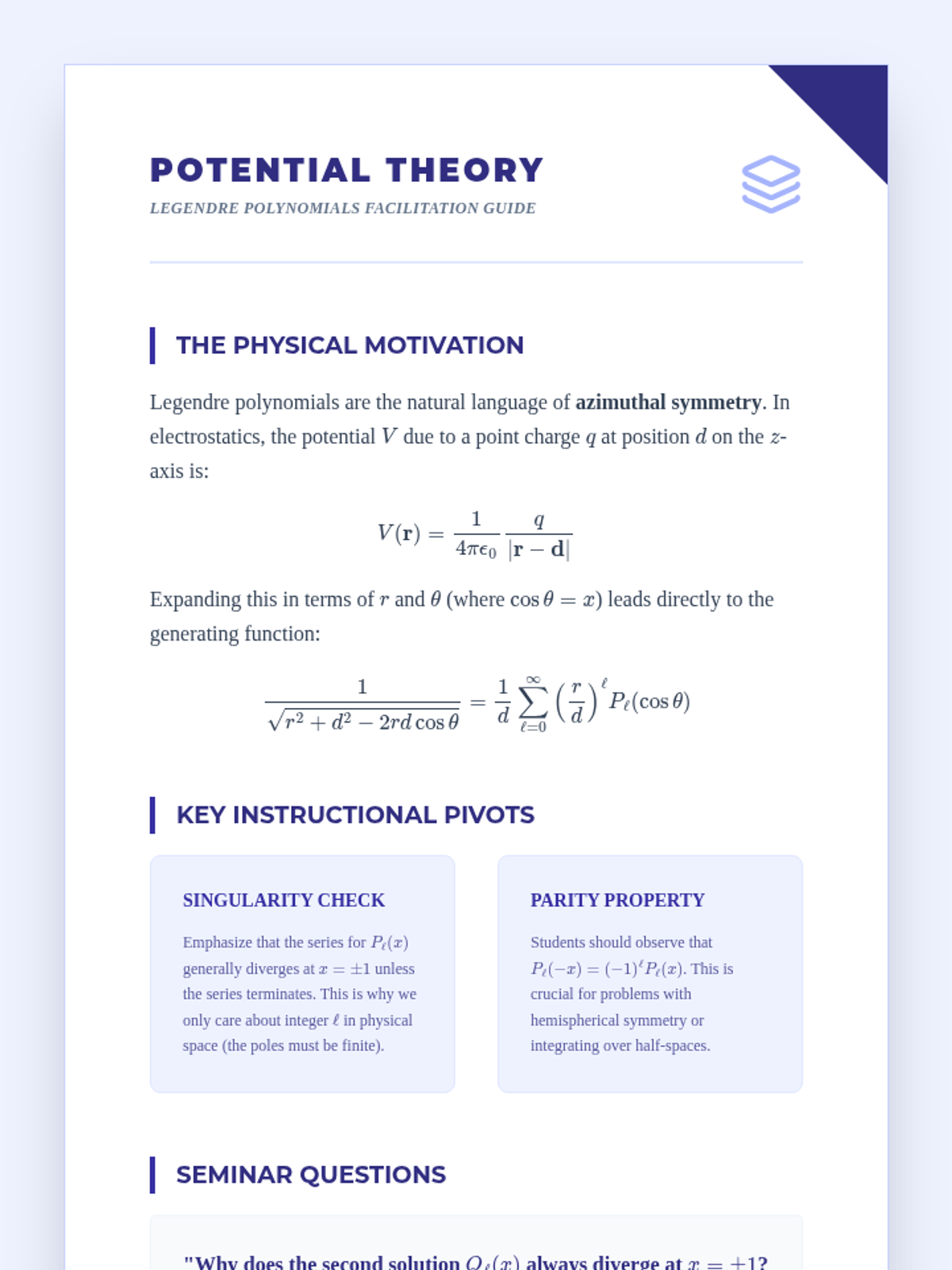
Students solve Laplace's equation for systems with spherical symmetry, introducing Legendre polynomials and Spherical Harmonics.
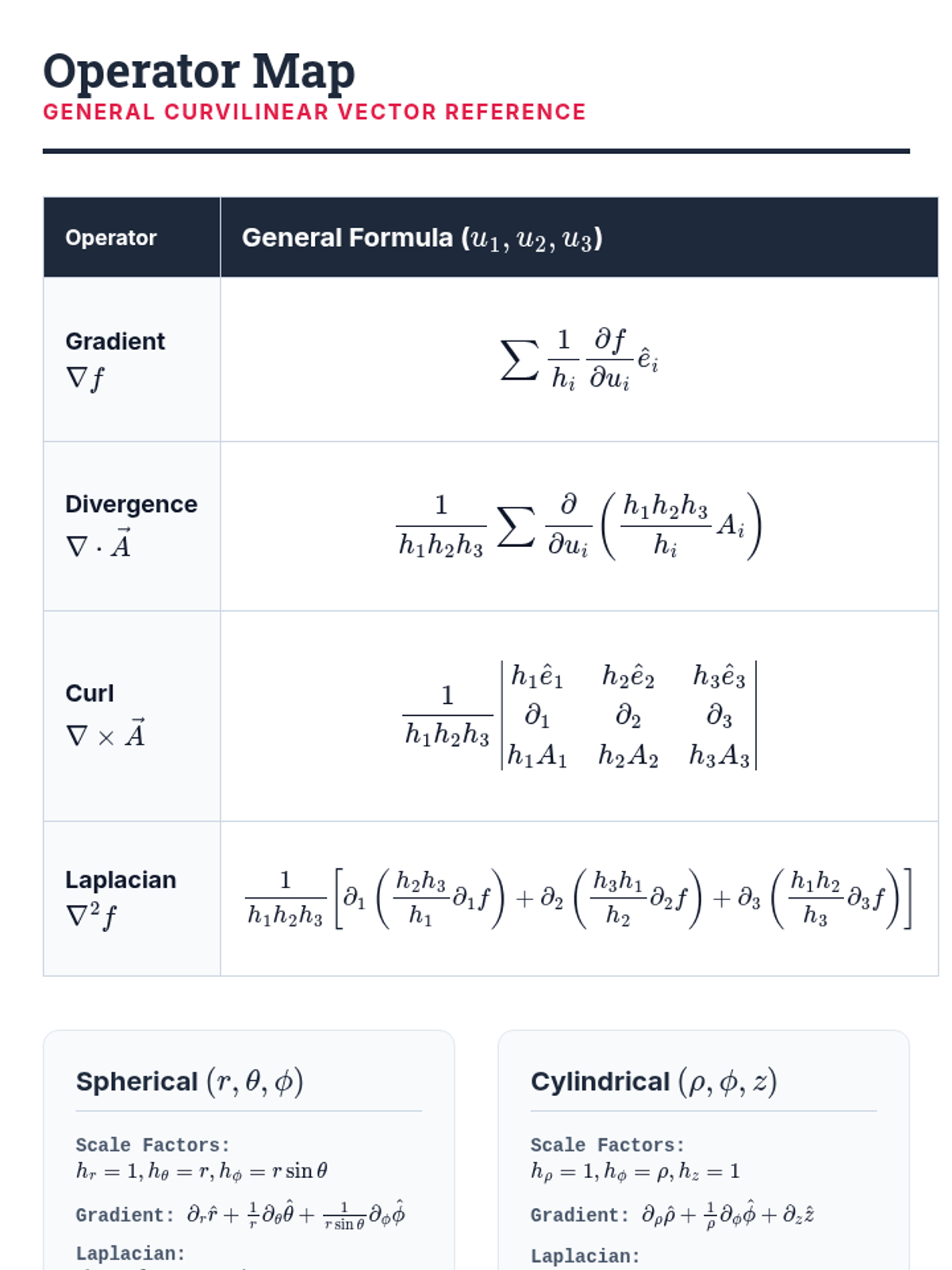
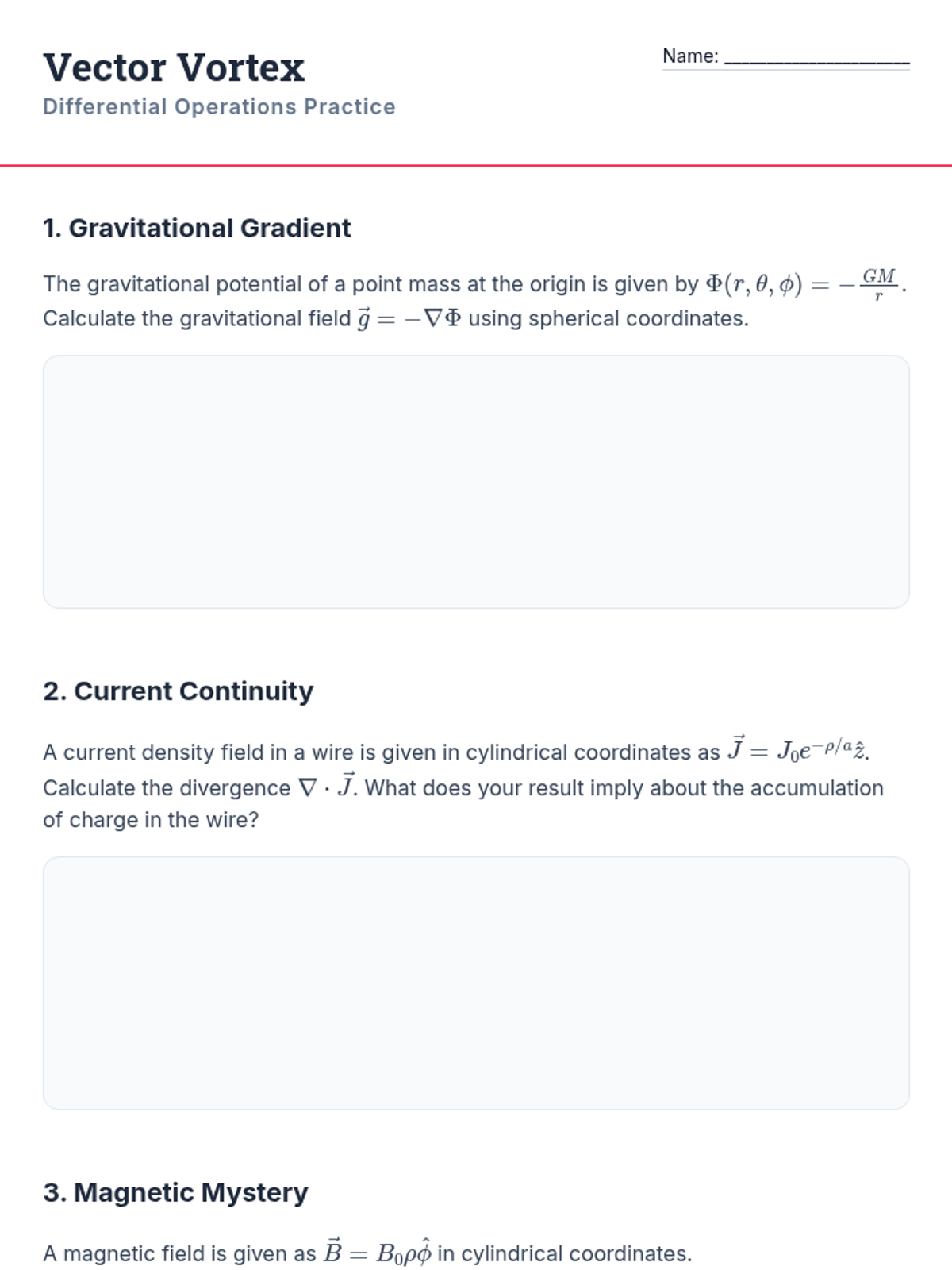
Students translate the Del operator into general curvilinear coordinates and apply these operators to physical vector fields.
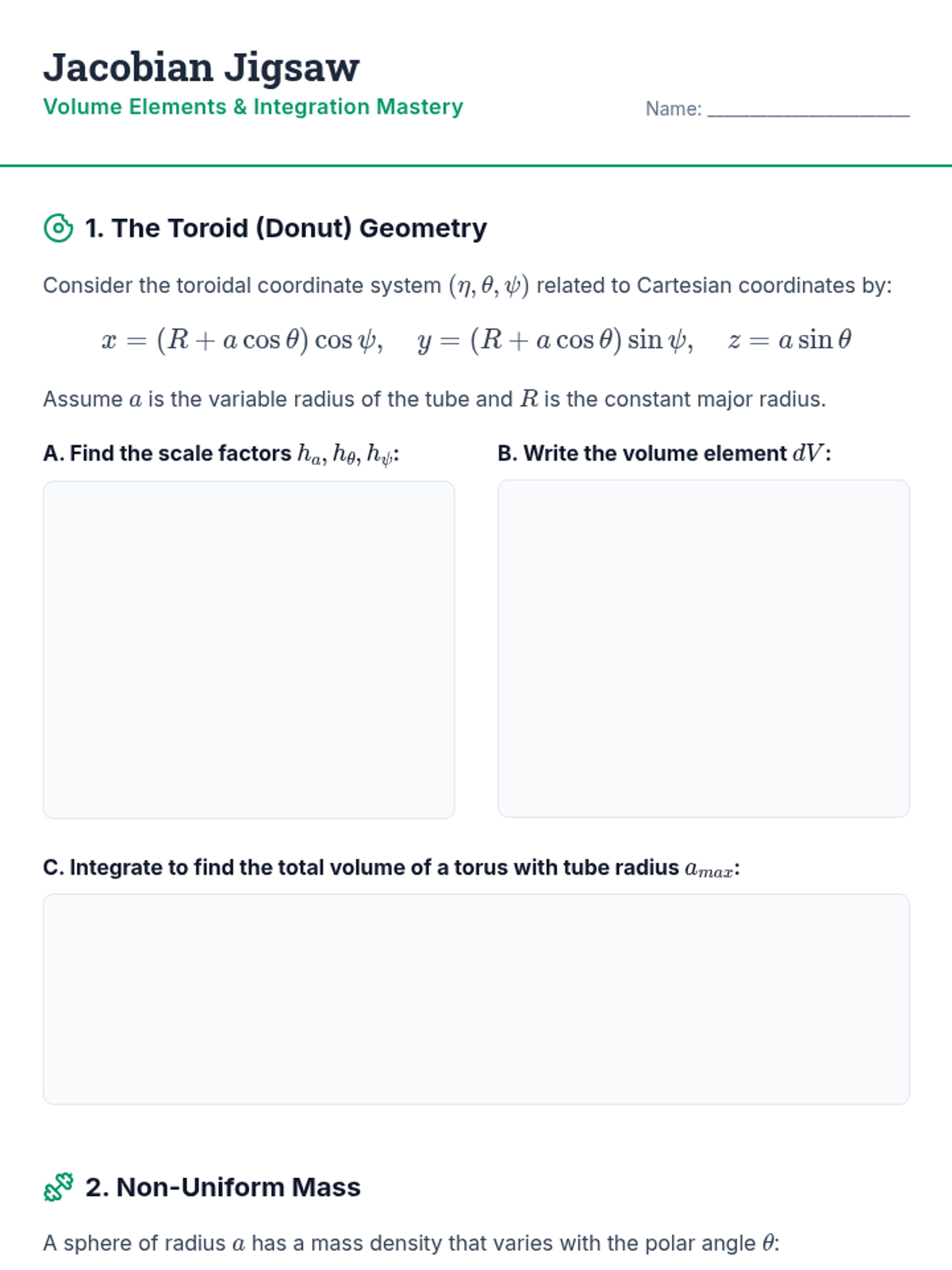
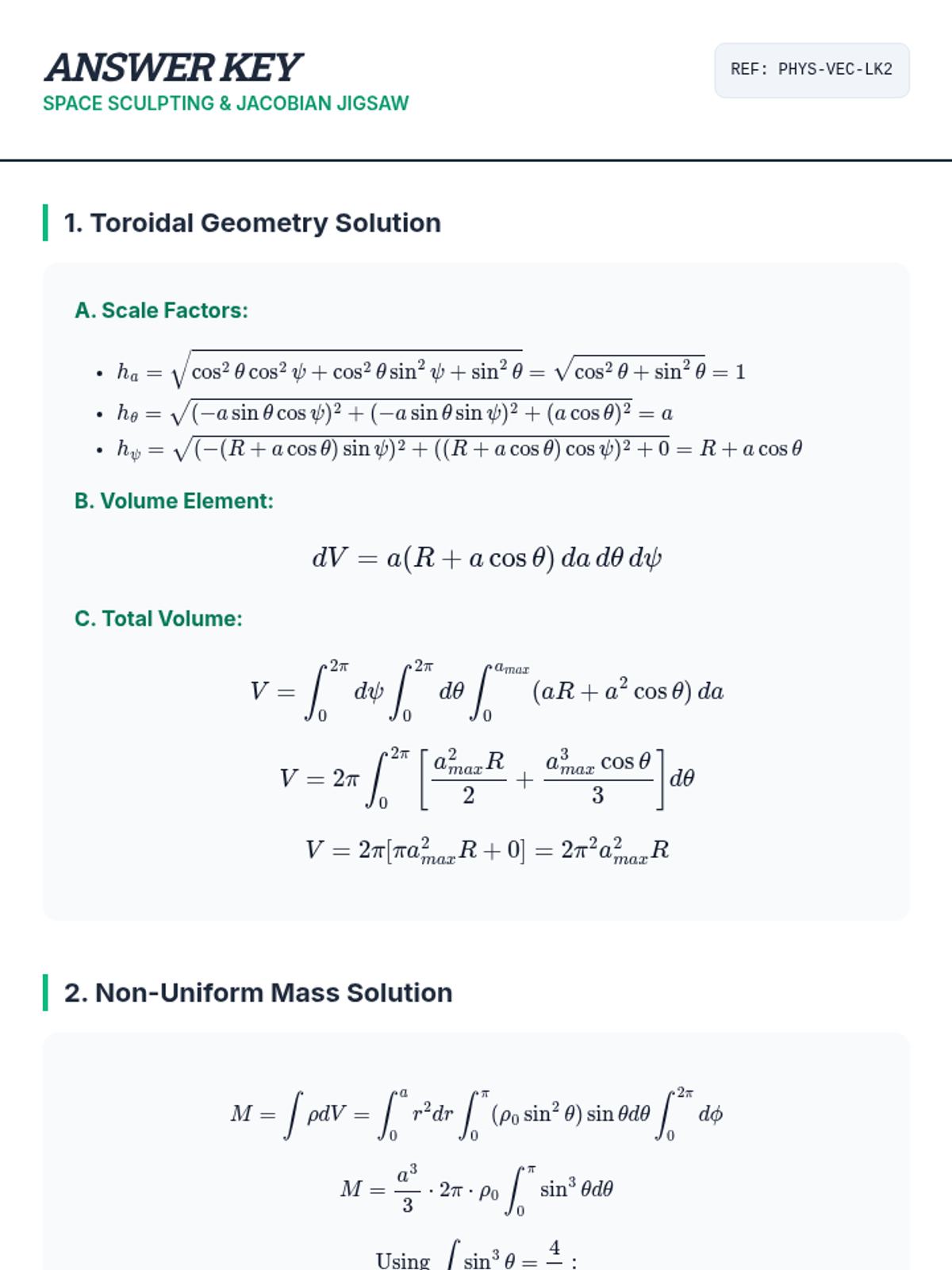
Focusing on integration, students construct volume and area elements (Jacobians) for spherical and cylindrical geometries and practice integrating scalar fields over complex 3D domains.
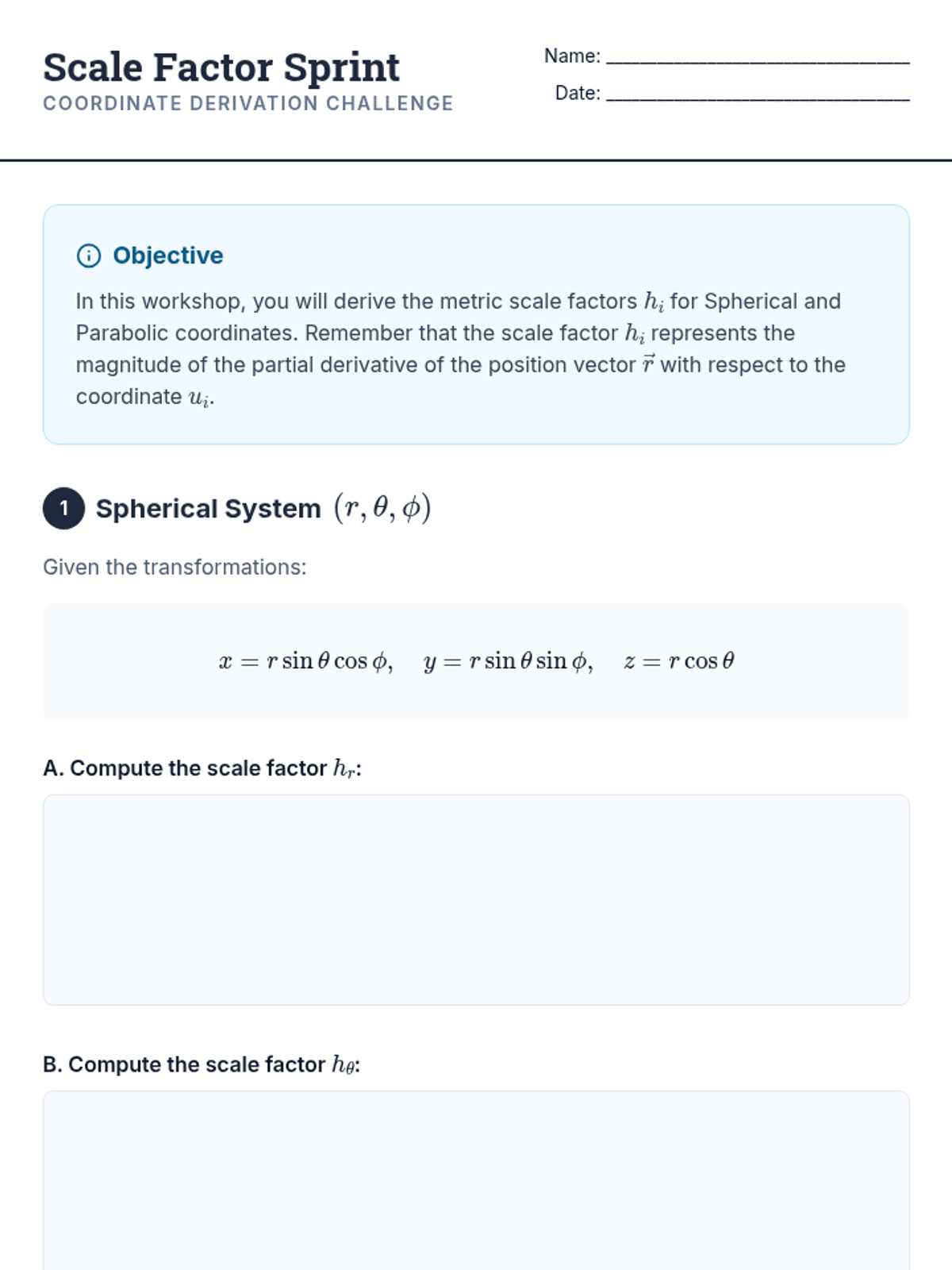
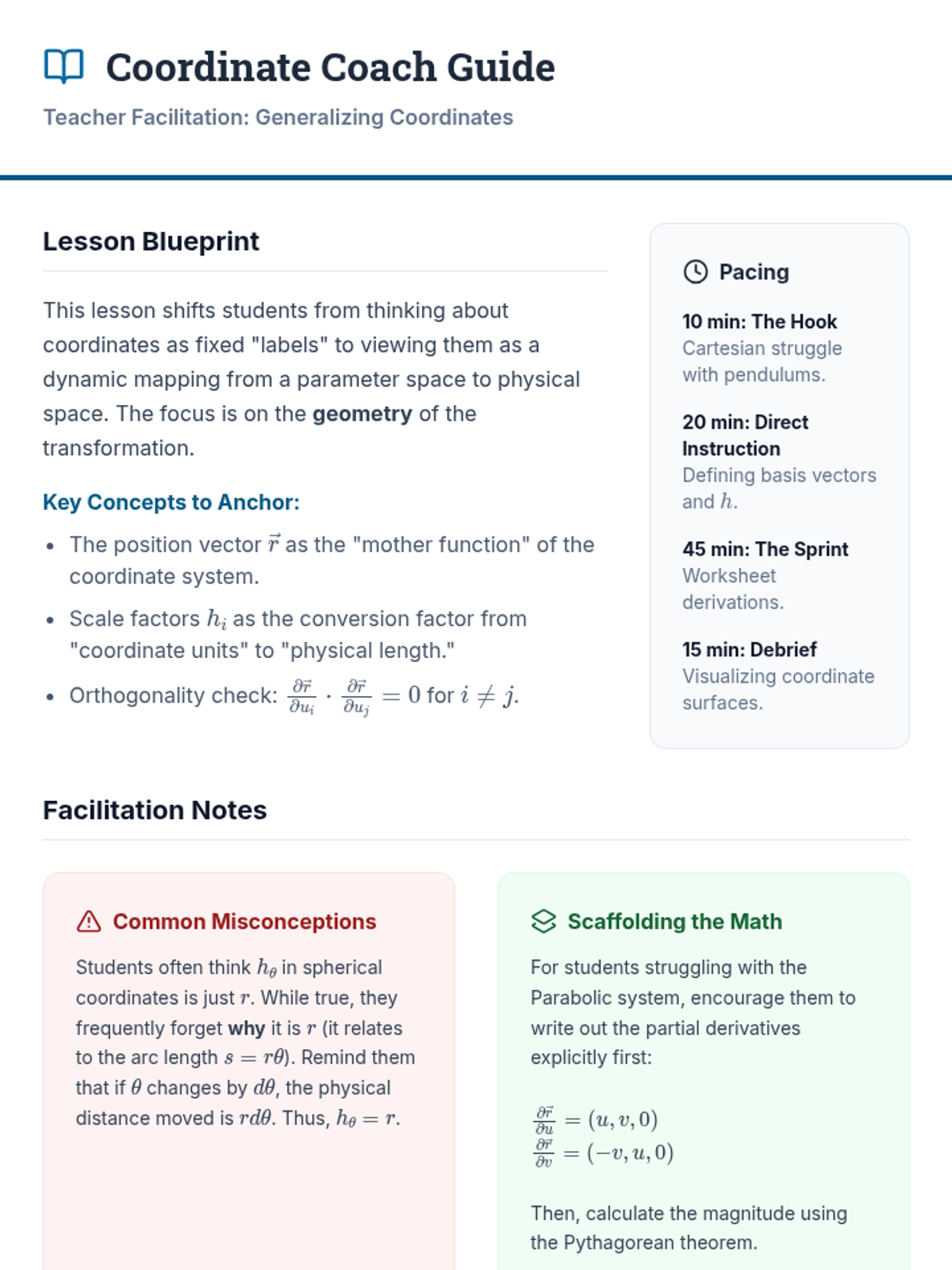
Students derive basis vectors and scale factors for general orthogonal curvilinear coordinates and learn how to define position vectors in non-Cartesian geometries.
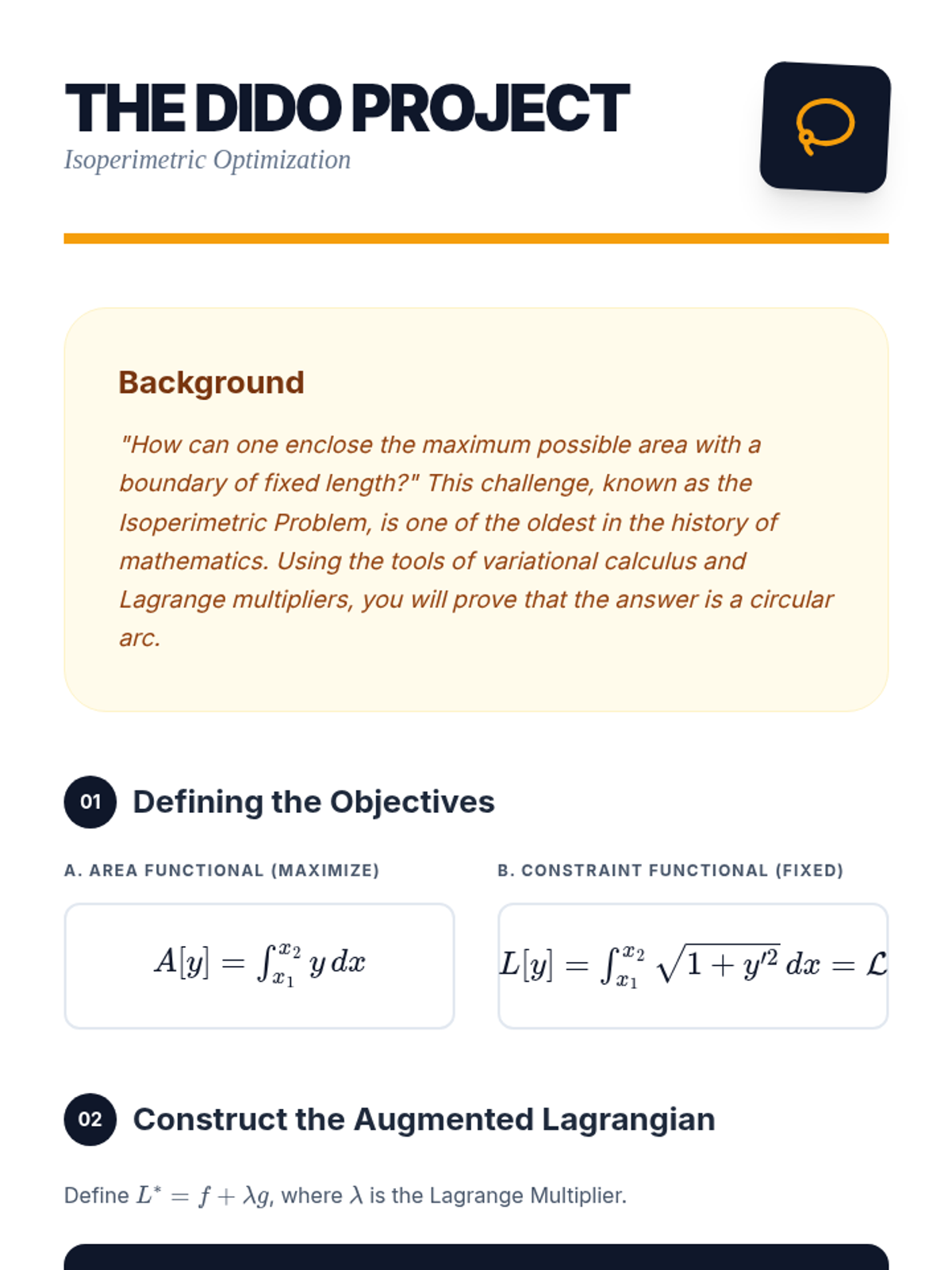
Solving optimization problems with integral constraints, focusing on the isoperimetric problem and Lagrange multipliers.
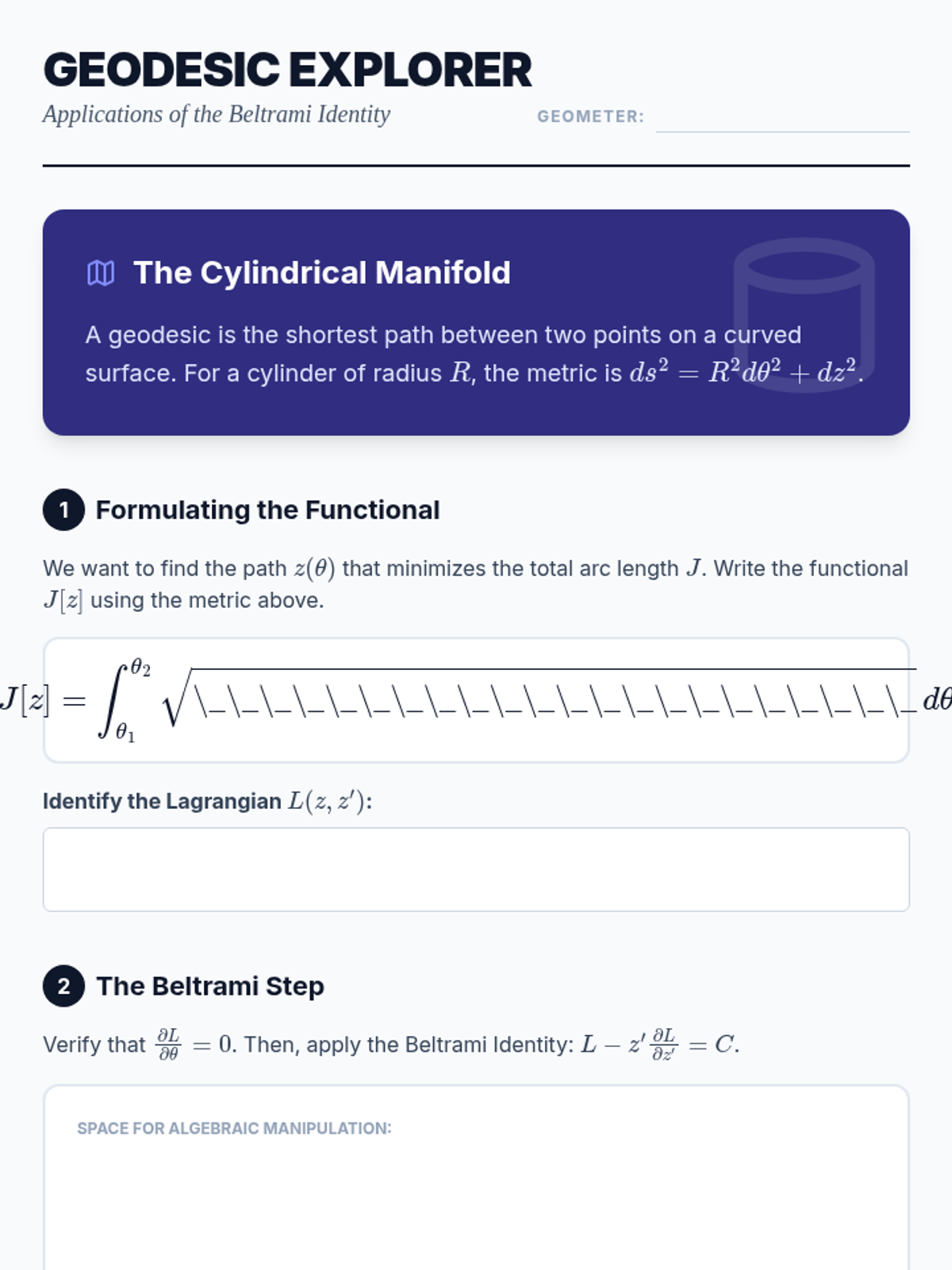
Introduction to the Beltrami Identity for functionals independent of the independent variable, used for geodesic analysis.
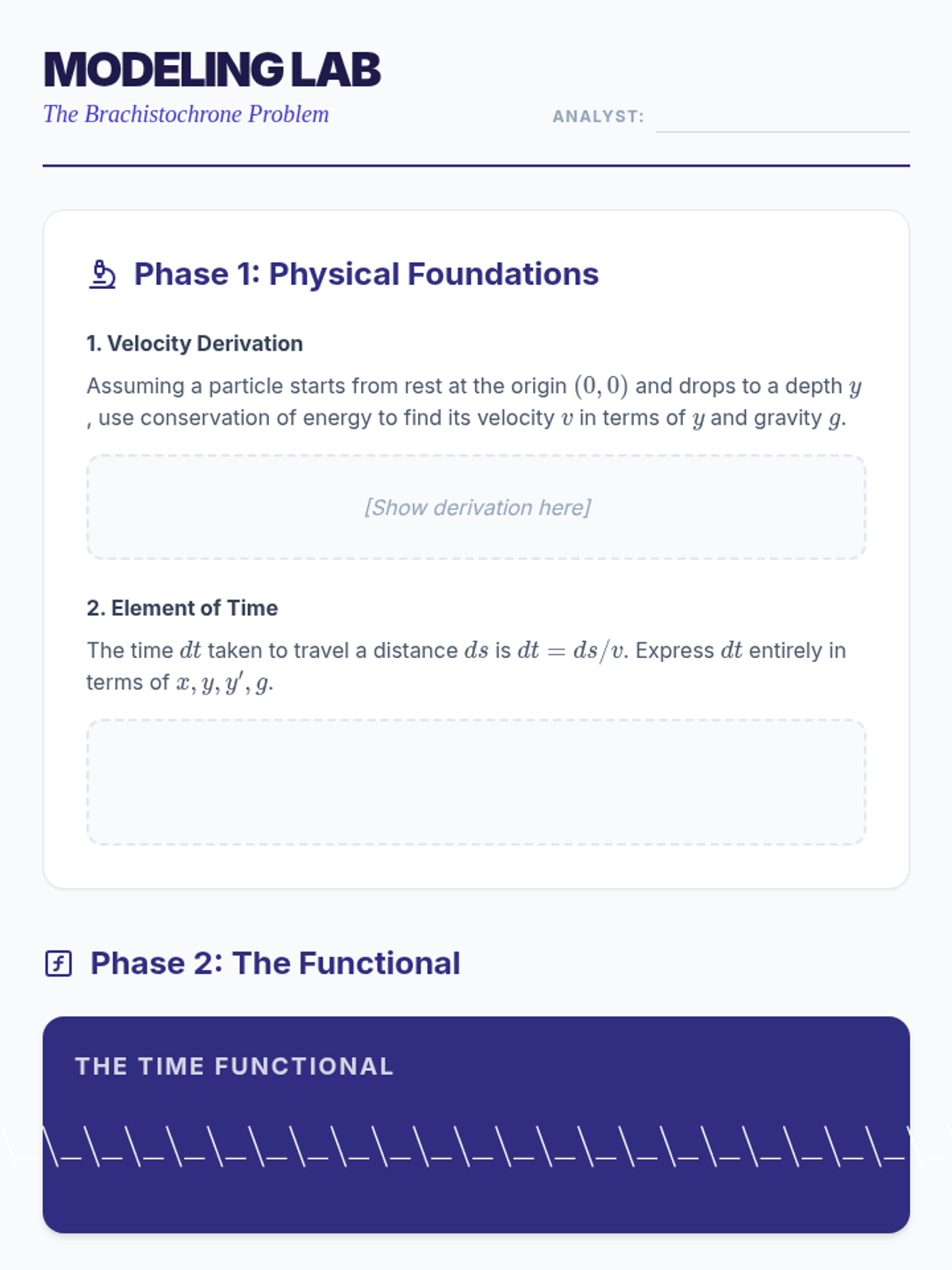
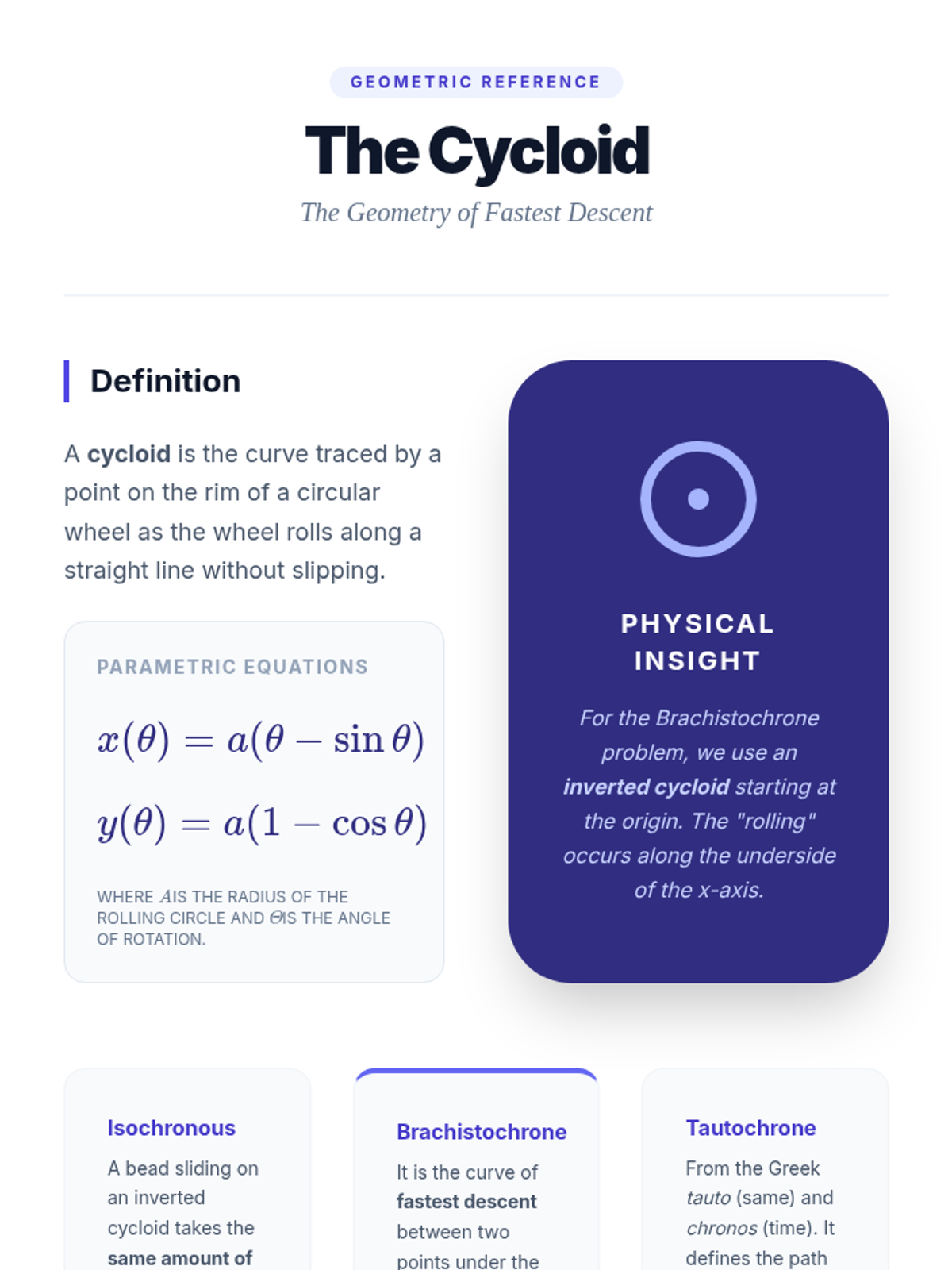
Application of variational principles to solve the Brachistochrone problem—finding the path of fastest descent.
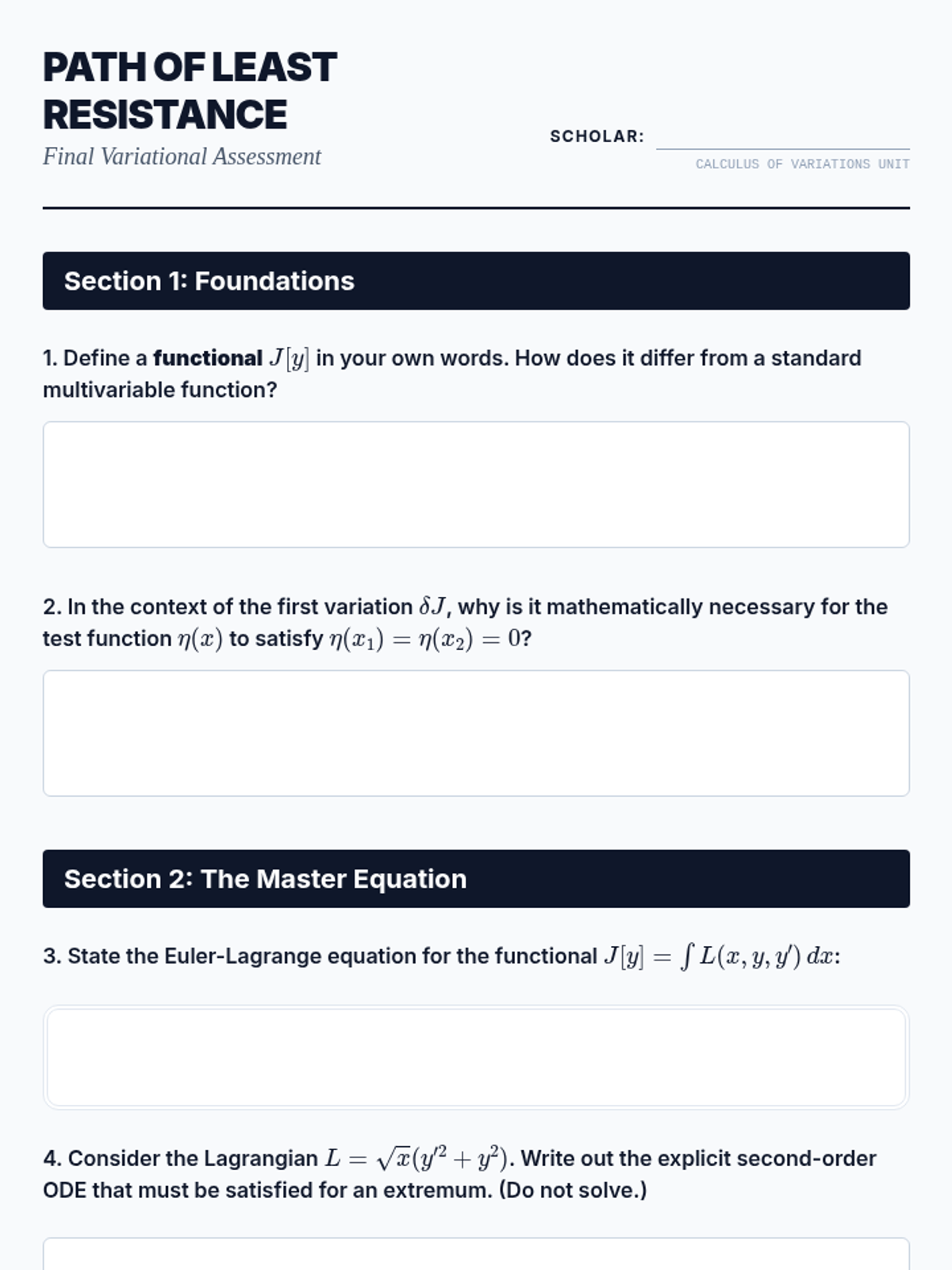
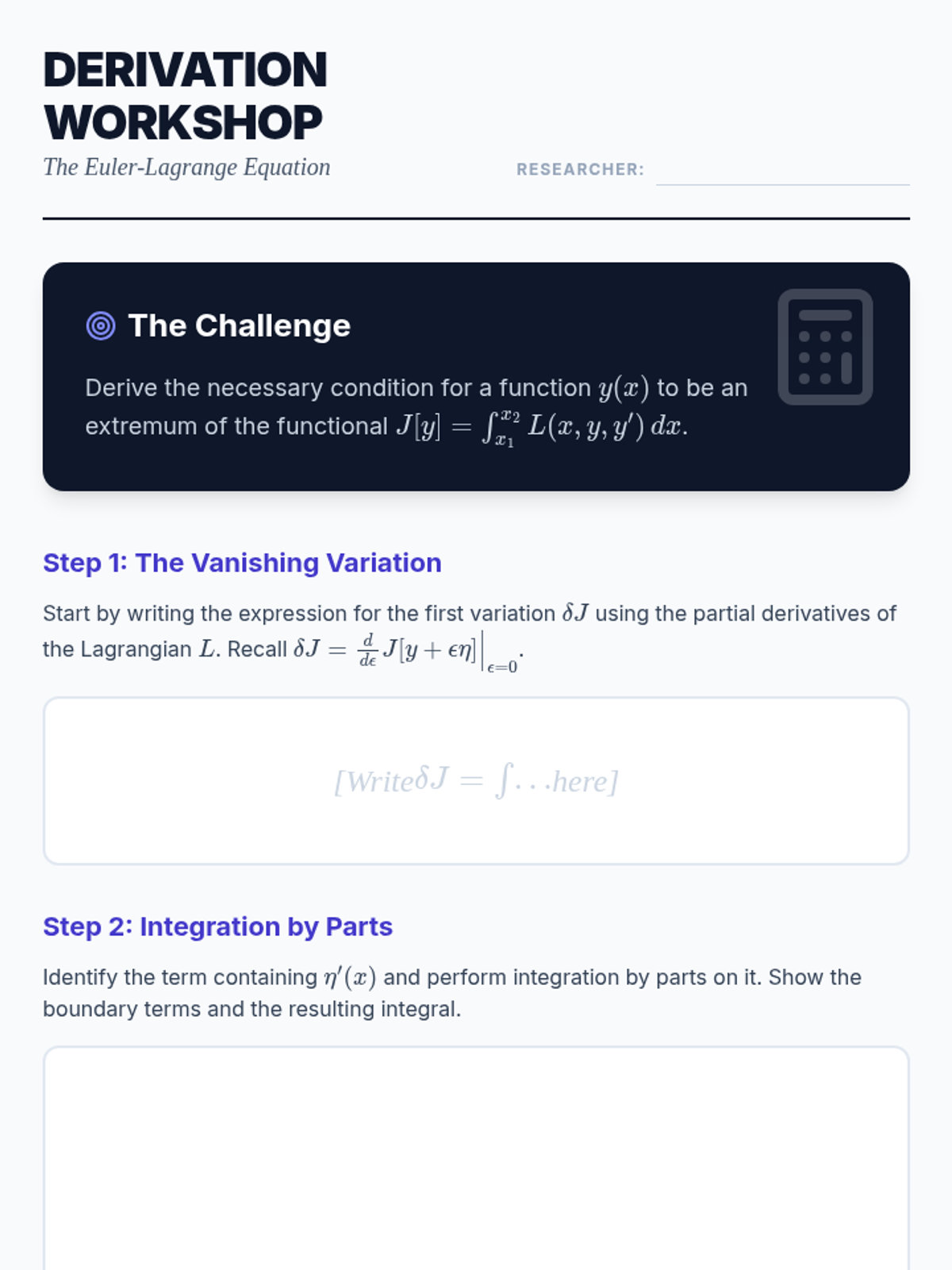
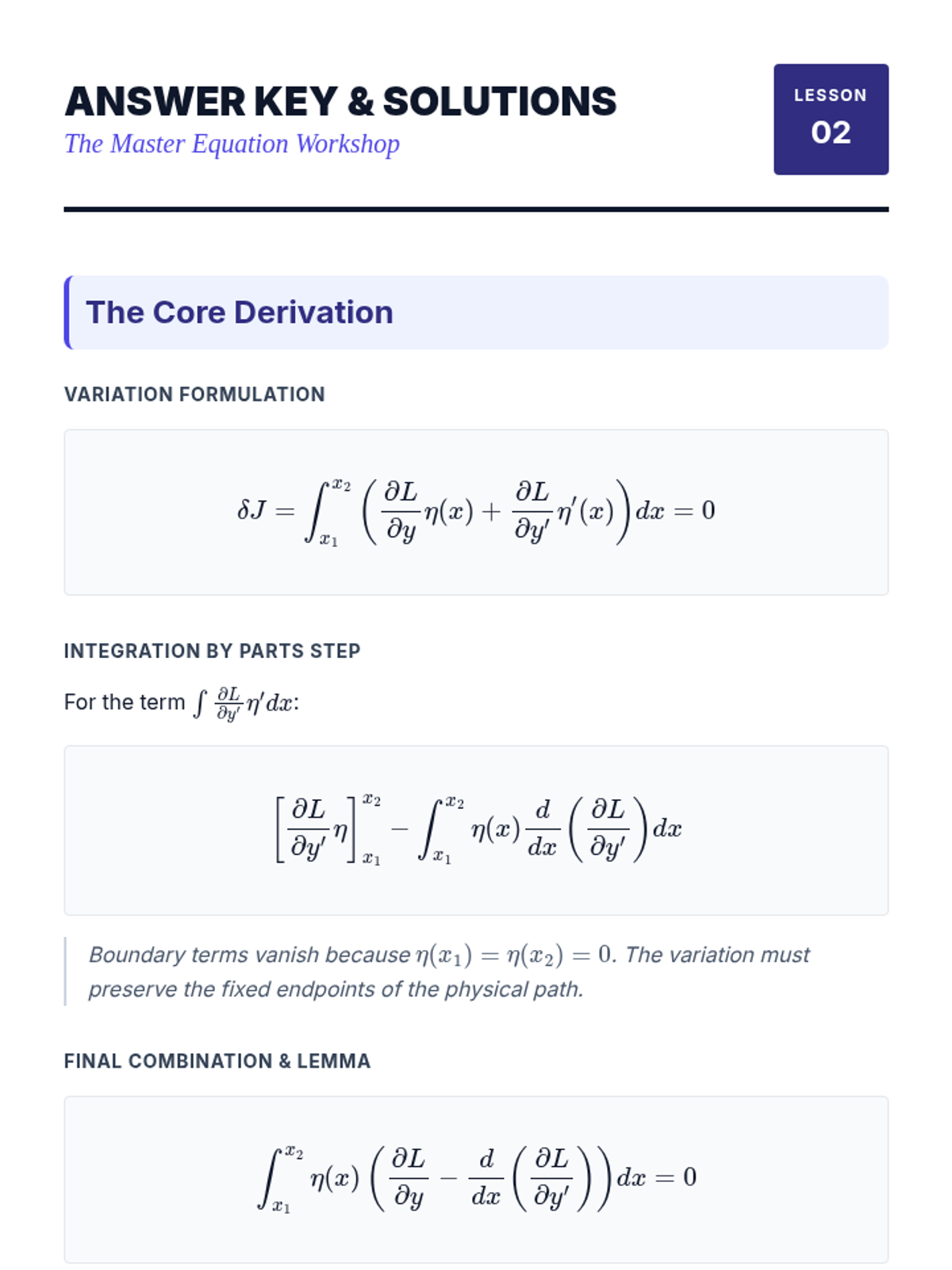
A deep dive into the derivation of the Euler-Lagrange equation using the Fundamental Lemma of the Calculus of Variations.
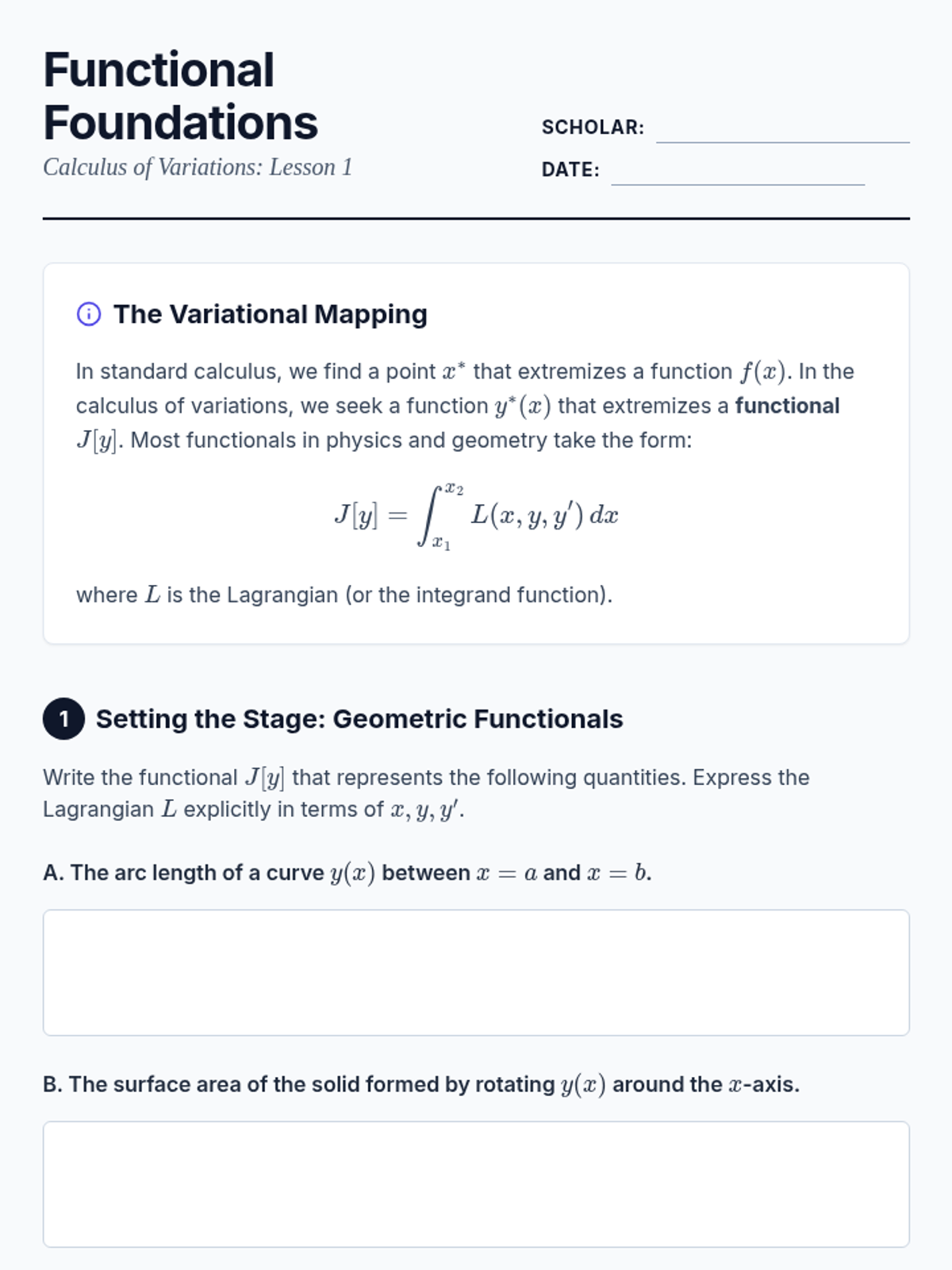
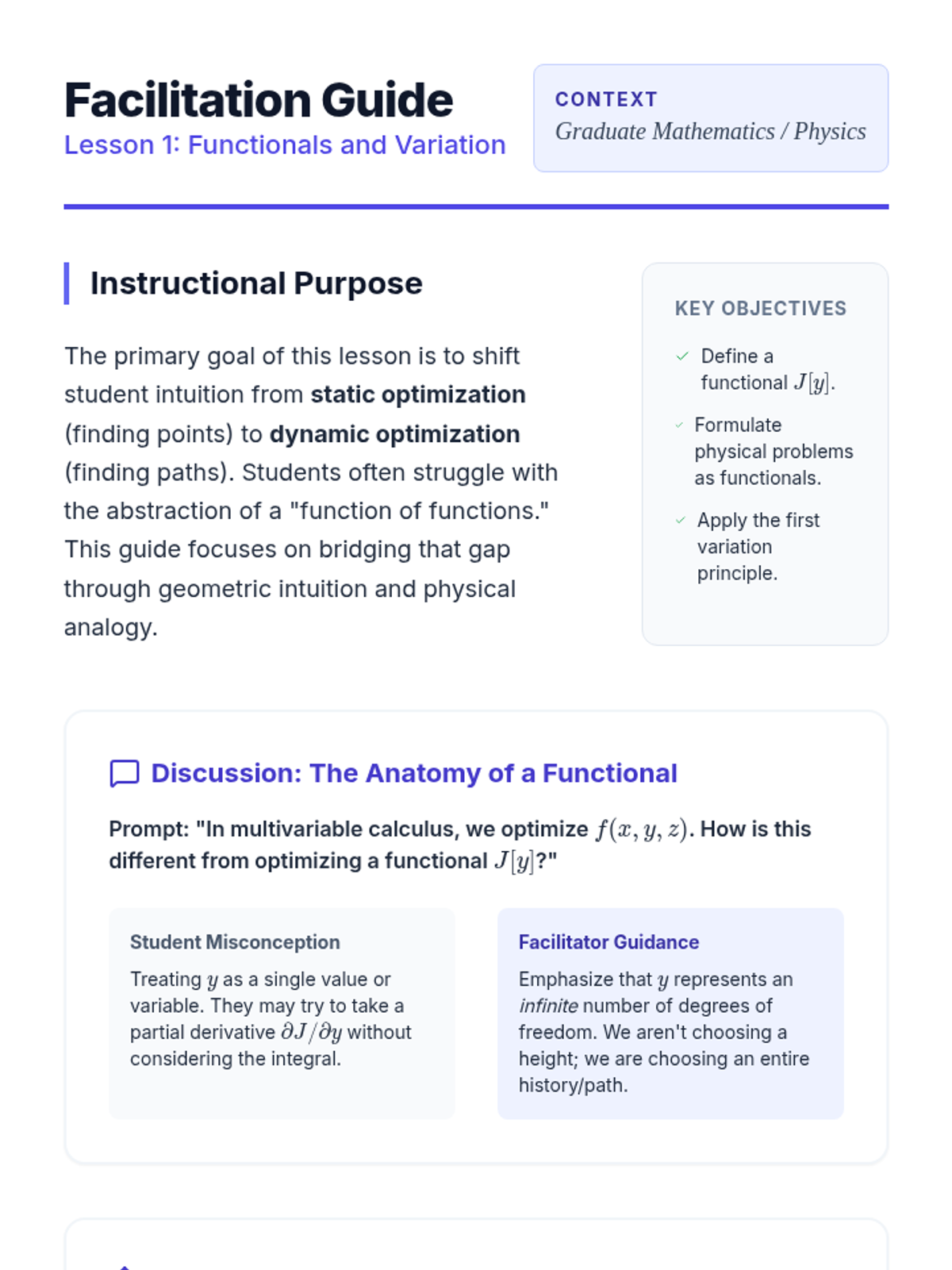
An introduction to functionals and the concept of a variation, shifting focus from point-wise optimization to path optimization.
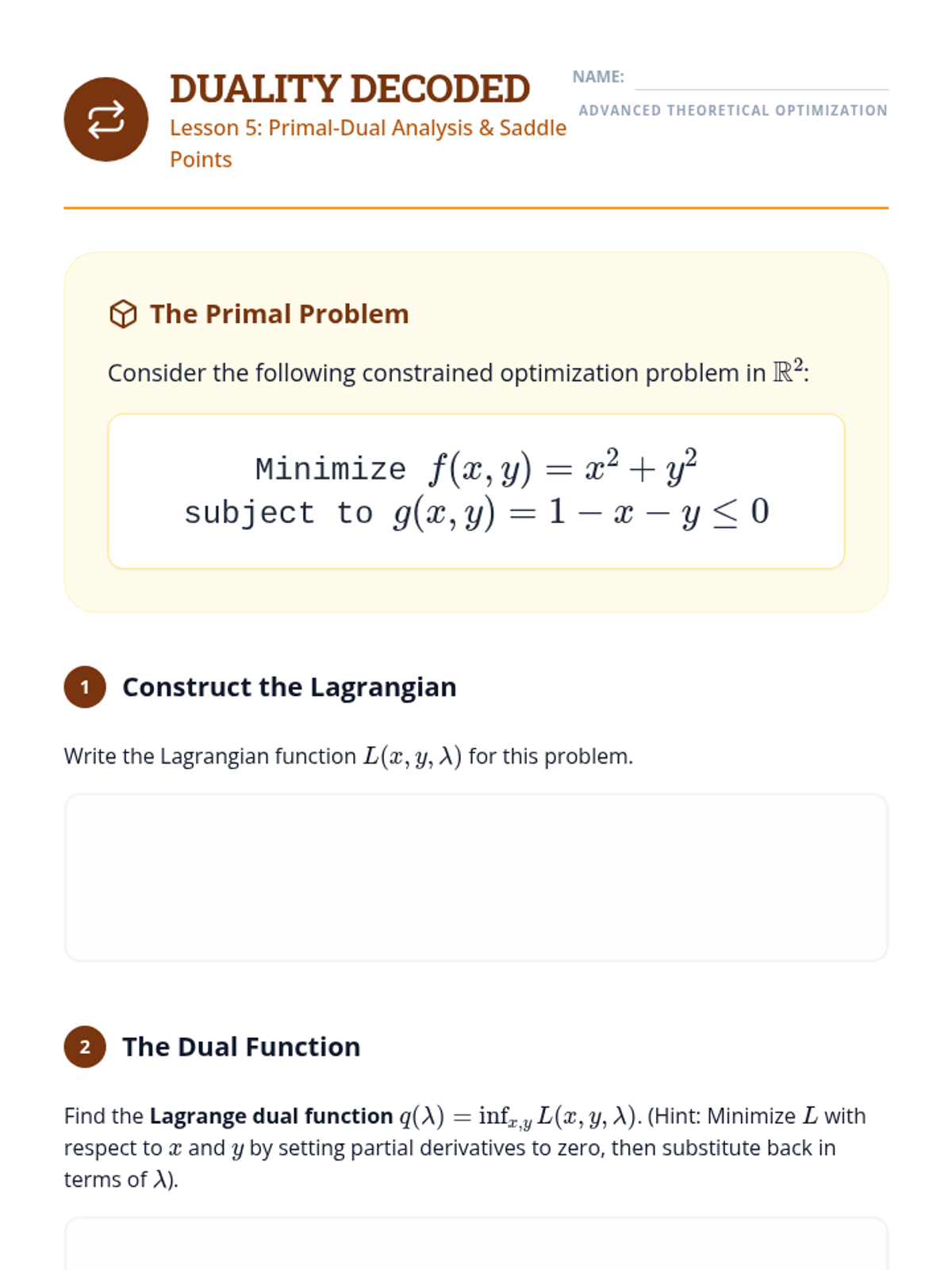
The sequence concludes with an introduction to Min-Max theorems and saddle point analysis, exploring duality gaps and the conditions under which primal and dual problems align.
Focusing on the Hessian matrix, students derive and apply tests for positive definiteness to classify critical points in higher dimensions, bridging linear algebra and calculus.
Students analyze the definitions of convex and concave functions, proving that local minima in convex functions are global minima and applying Jensen's Inequality.
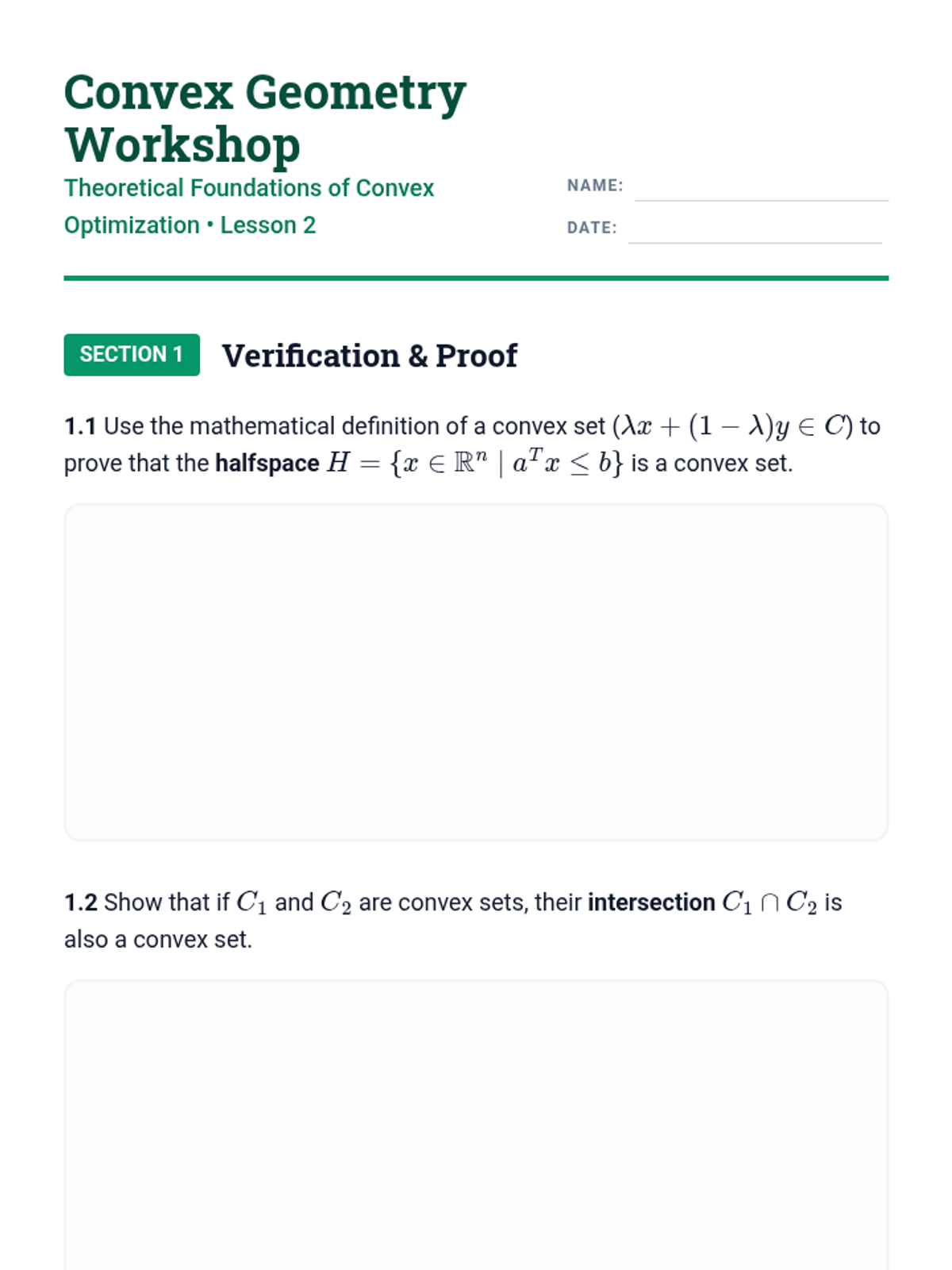
This lesson explores the geometry of the domain, defining convex sets, hulls, and separating hyperplanes, and distinguishing between convex and non-convex constraints.
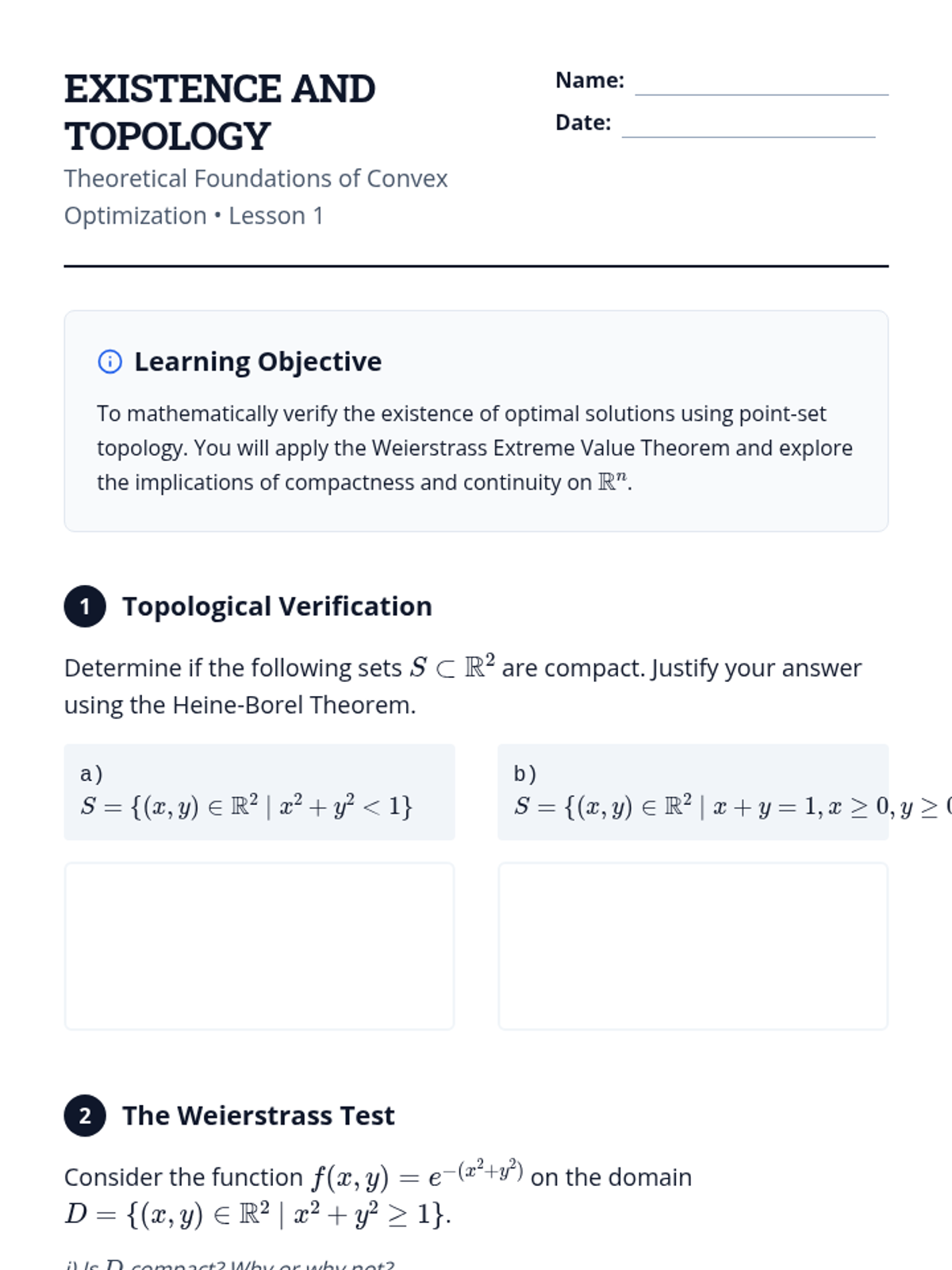
Students review point-set topology concepts including compactness and continuity to prove the Extreme Value Theorem in n-dimensions, focusing on identifying when a function is guaranteed to attain a maximum or minimum.
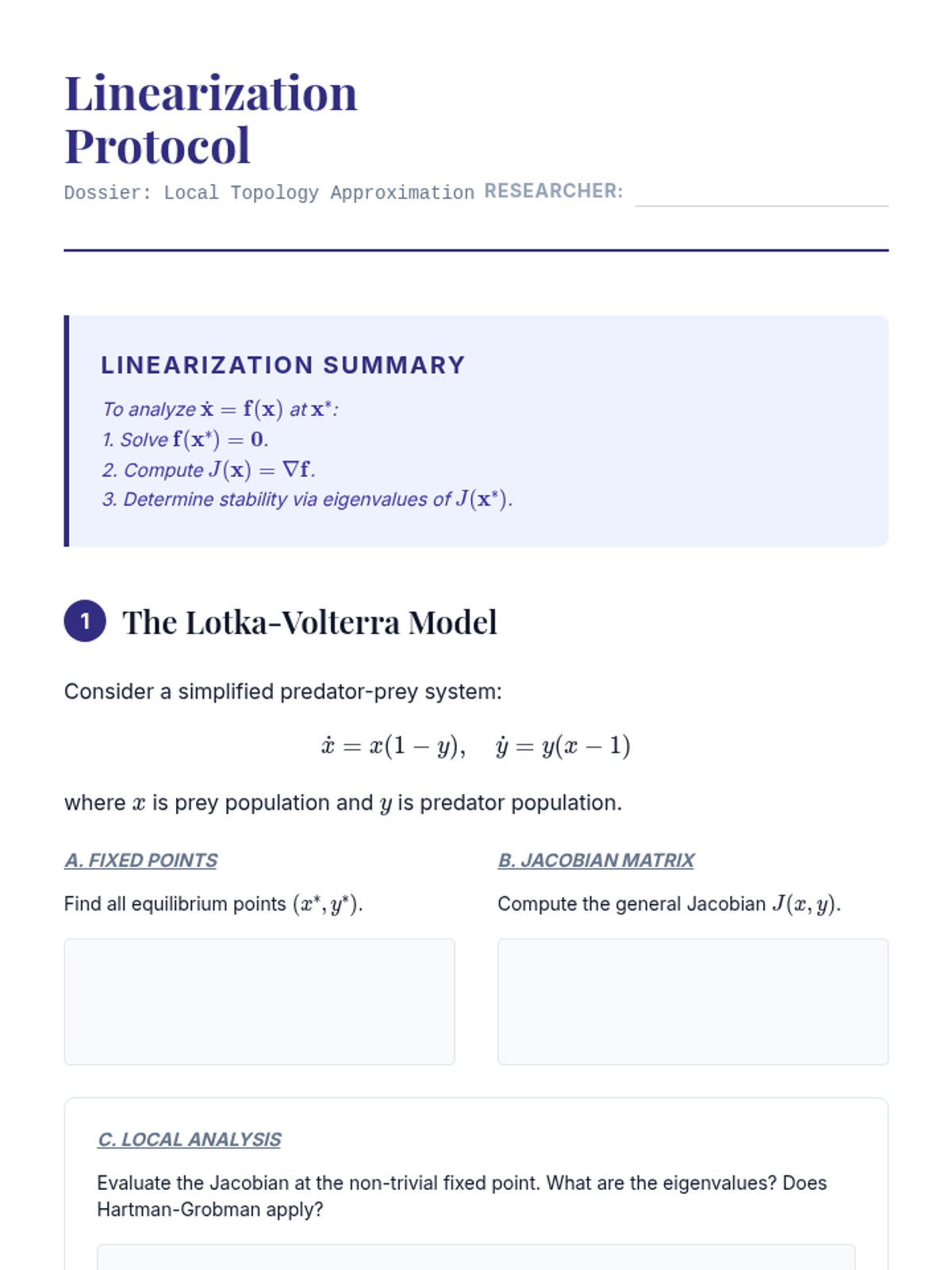
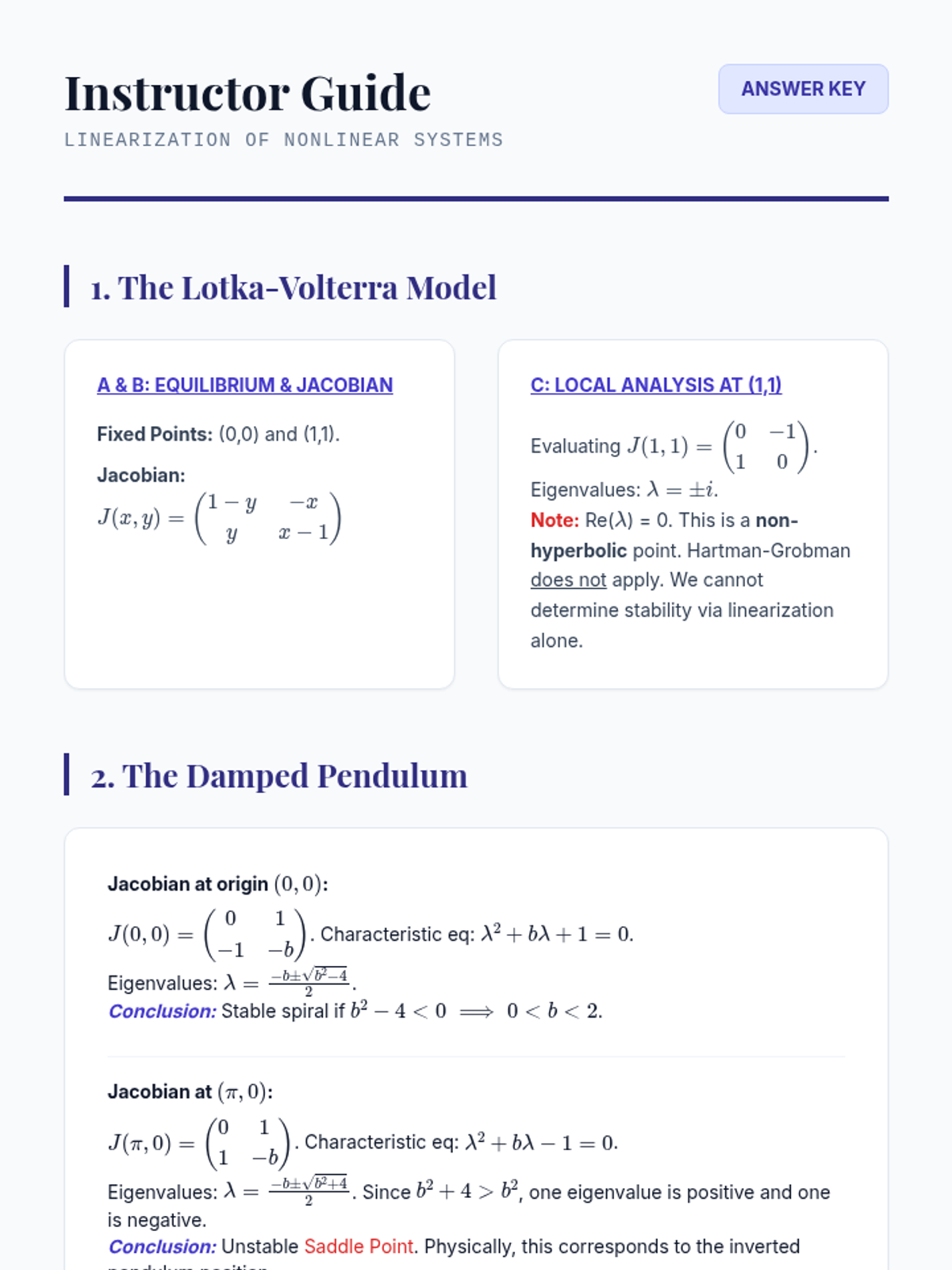
This lesson introduces the Hartman-Grobman theorem, allowing students to approximate nonlinear systems near hyperbolic equilibrium points using Jacobians. Students compare the linearized approximation with the actual nonlinear behavior.
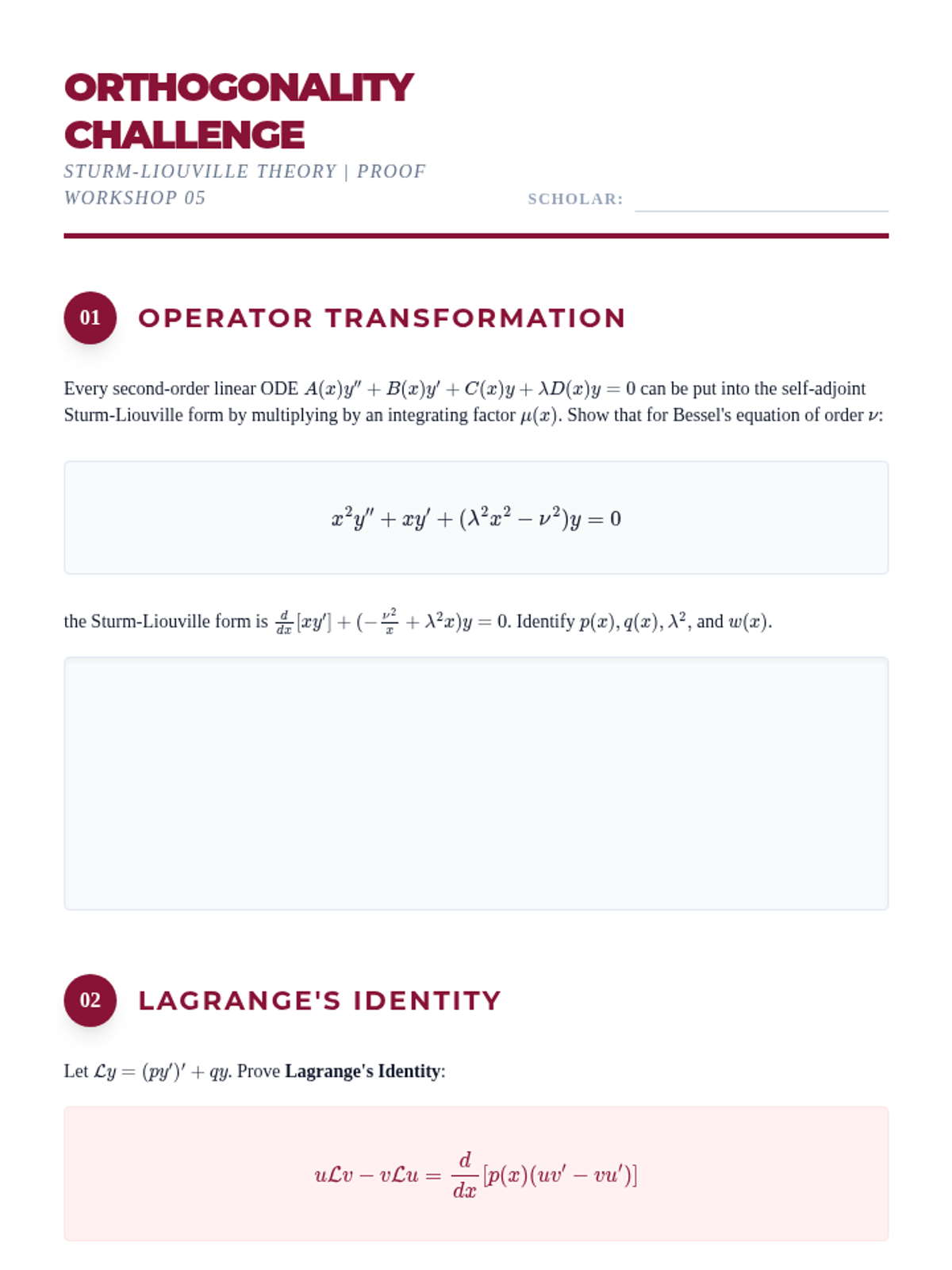
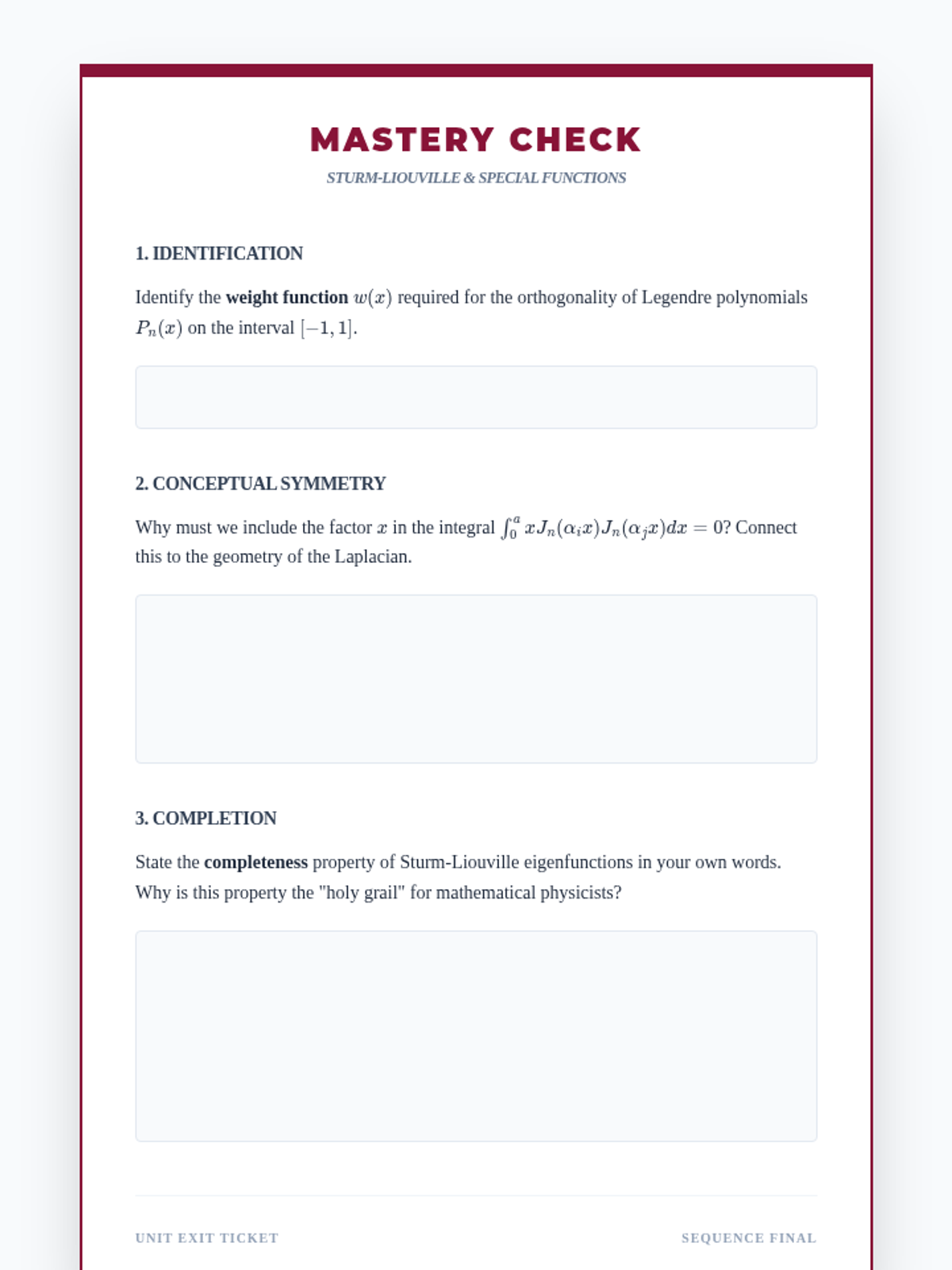
Synthesizes previous topics through the lens of Sturm-Liouville theory, focusing on the orthogonality of eigenfunctions and generalized Fourier series.
Examines Legendre's equation and the derivation of Legendre polynomials via Rodrigues' formula, emphasizing their role in spherical potential problems.
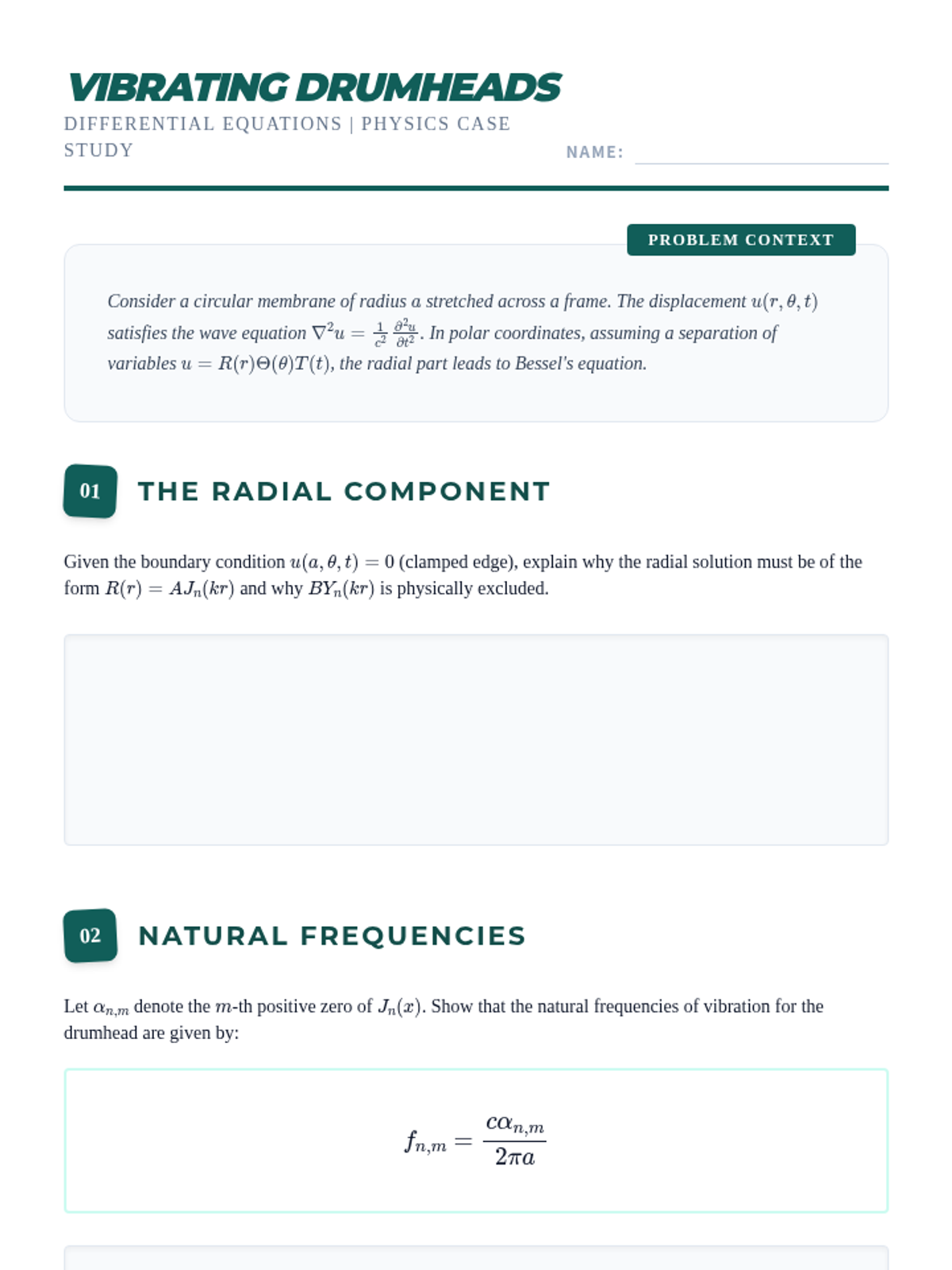
Explores Bessel's equation and the resulting Bessel functions of the first and second kind, particularly their applications in systems with cylindrical symmetry.
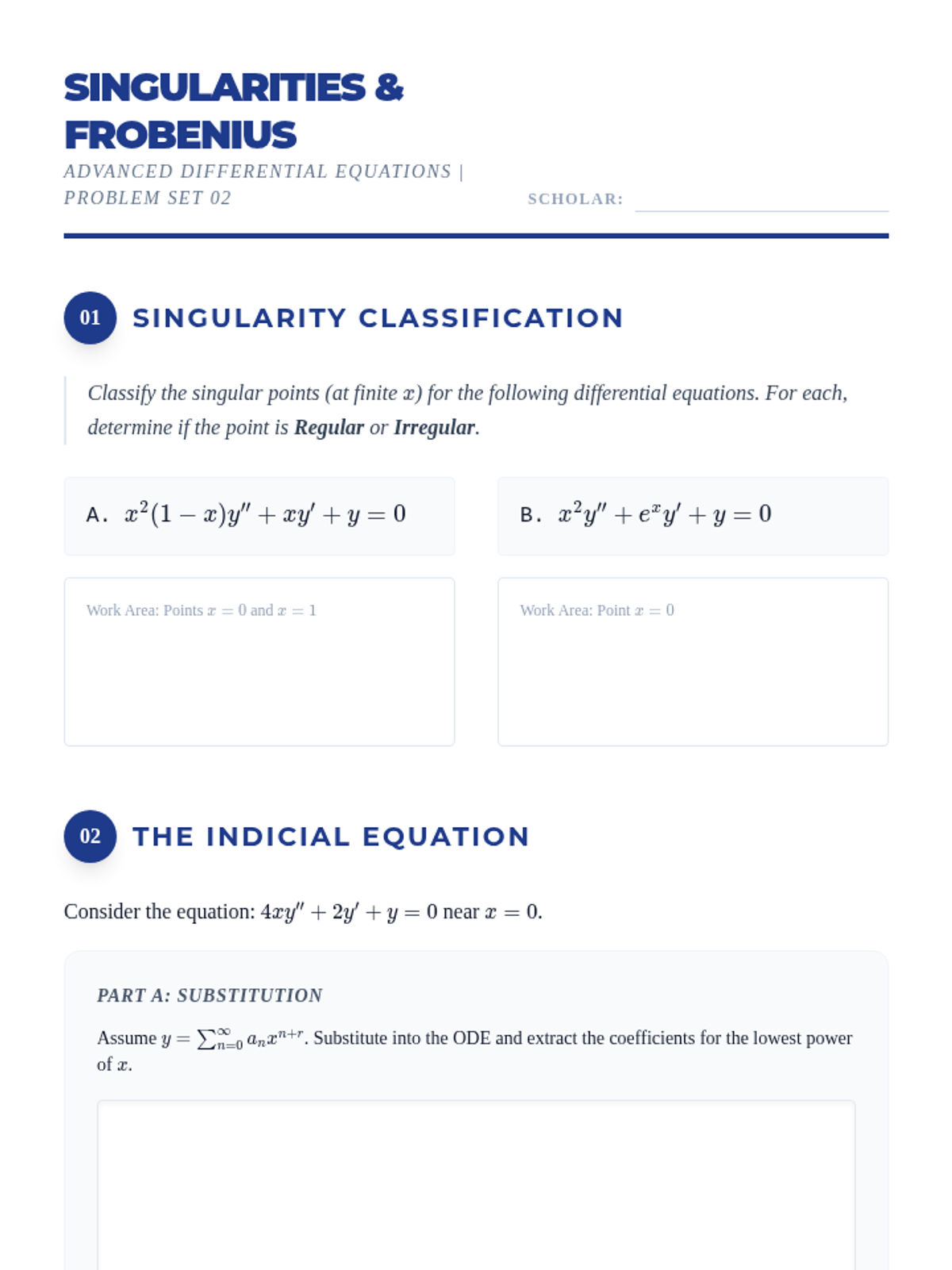
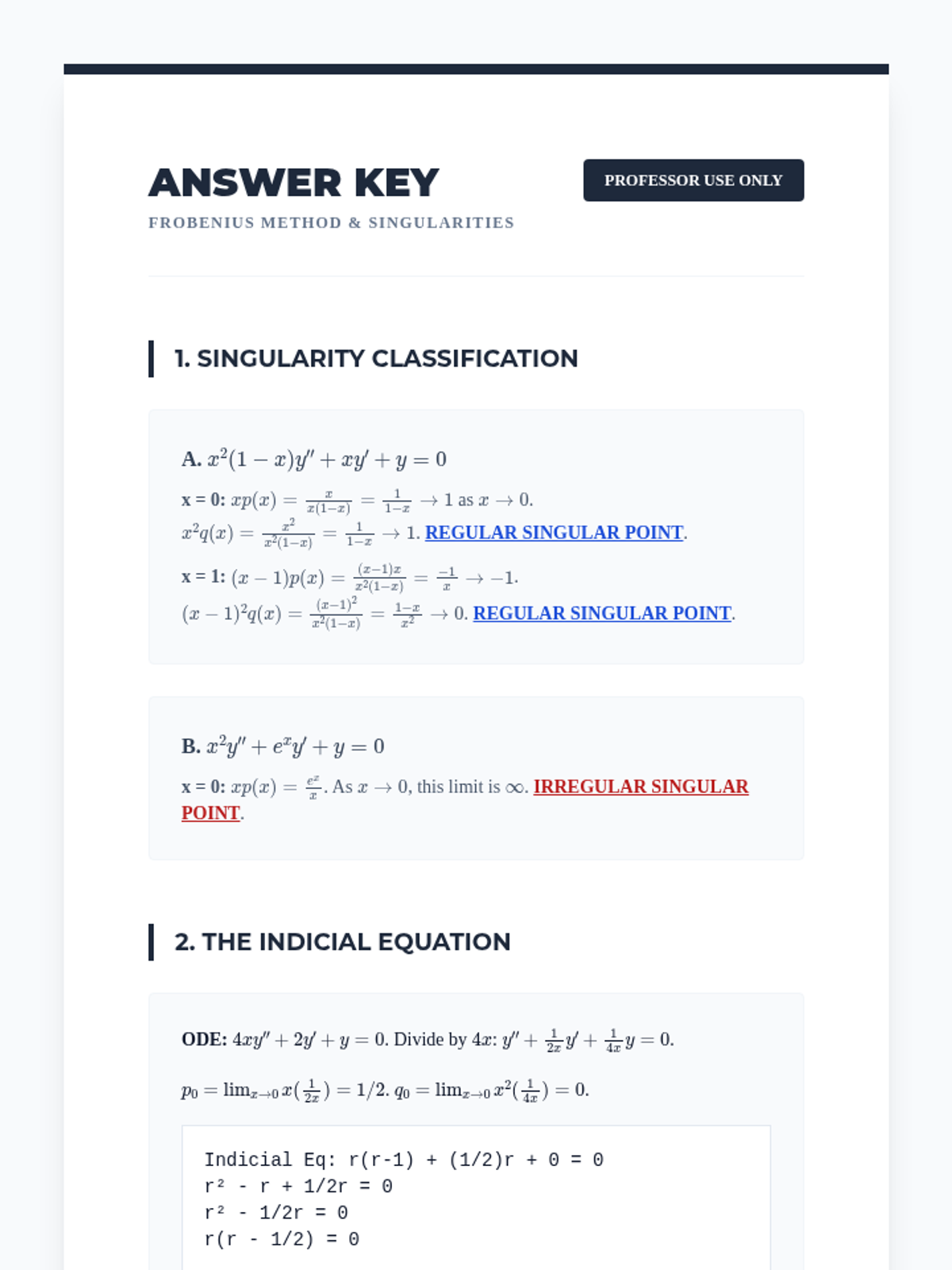
Covers the classification of singular points and the application of the Method of Frobenius to find solutions near regular singularities by solving the indicial equation.
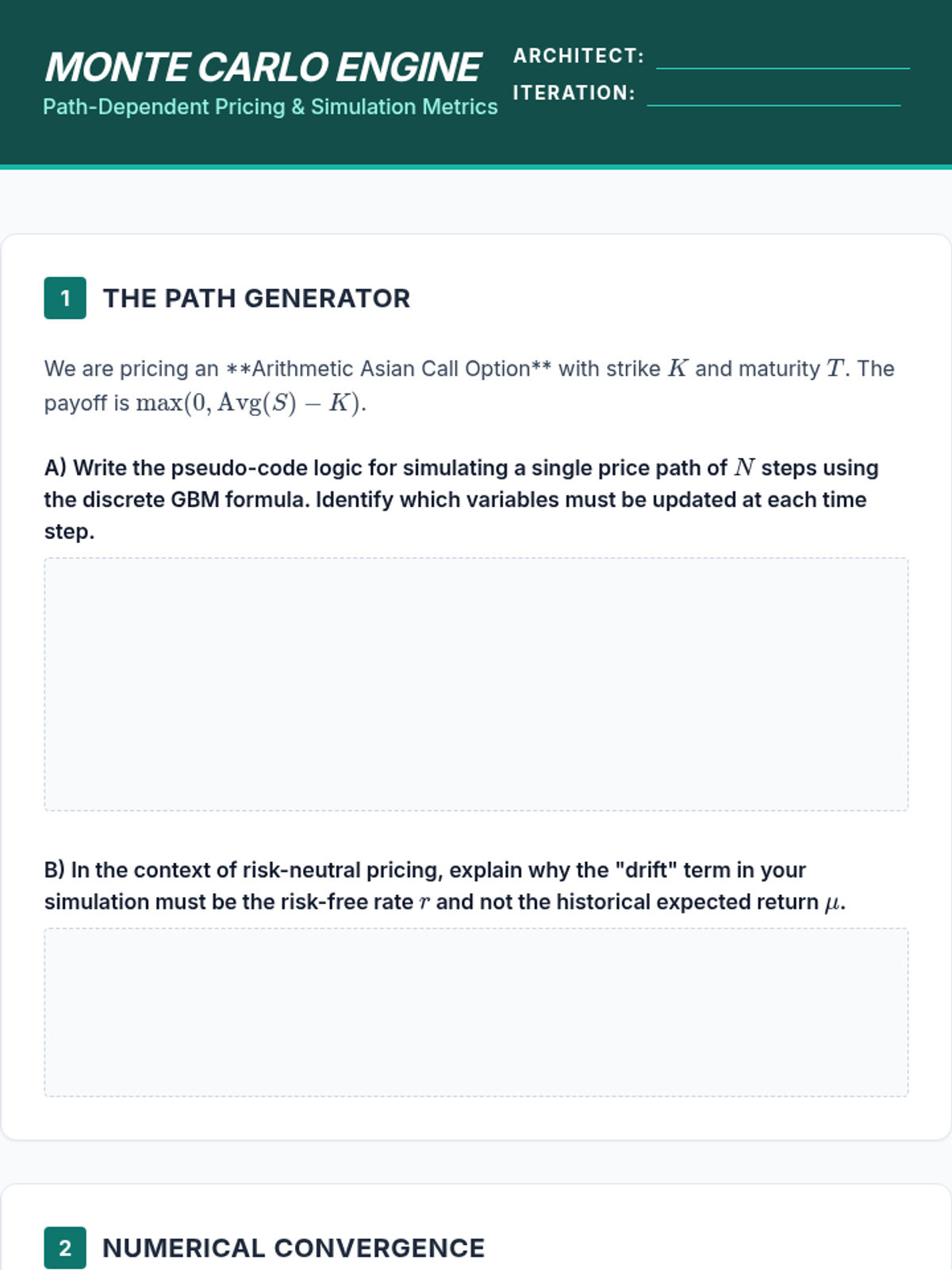
Computational estimation of expected payoffs for path-dependent derivatives using Geometric Brownian Motion and Monte Carlo simulations.
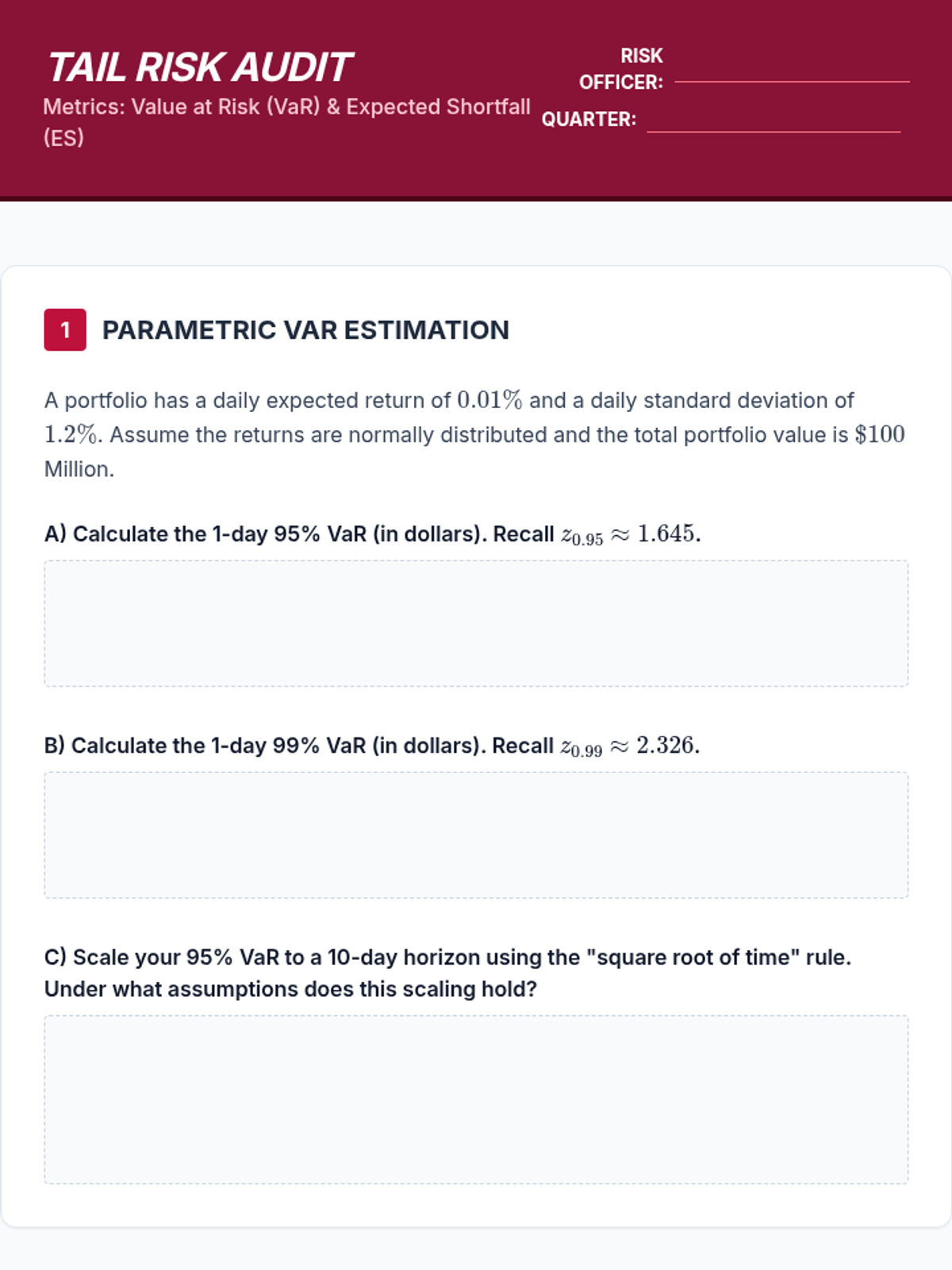
Analysis of tail risk through Value at Risk (VaR) and Expected Shortfall, focusing on the limitations of normal distributions.
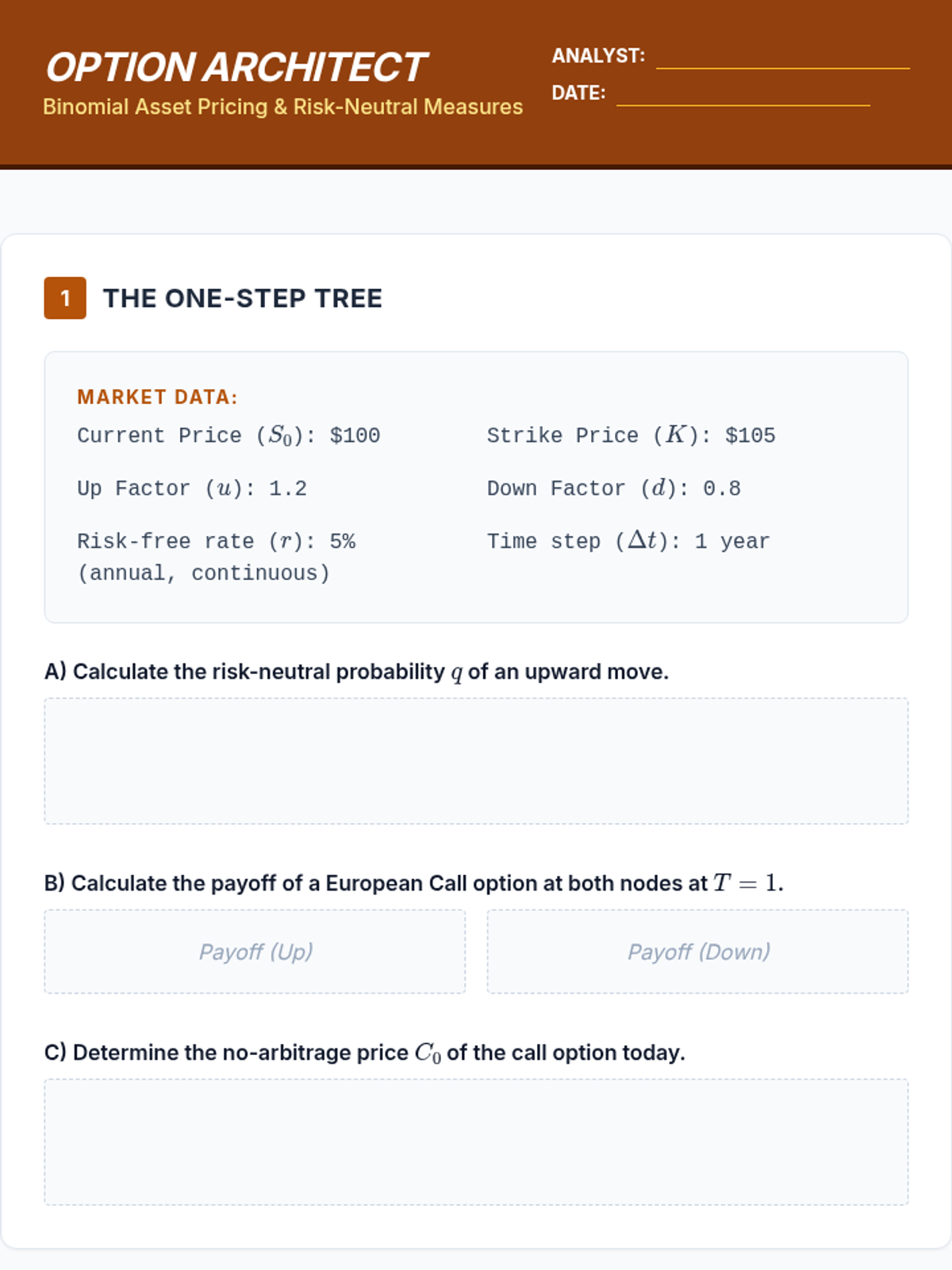
Introduction to risk-neutral measures and binomial pricing models, using expected values to price options without arbitrage.
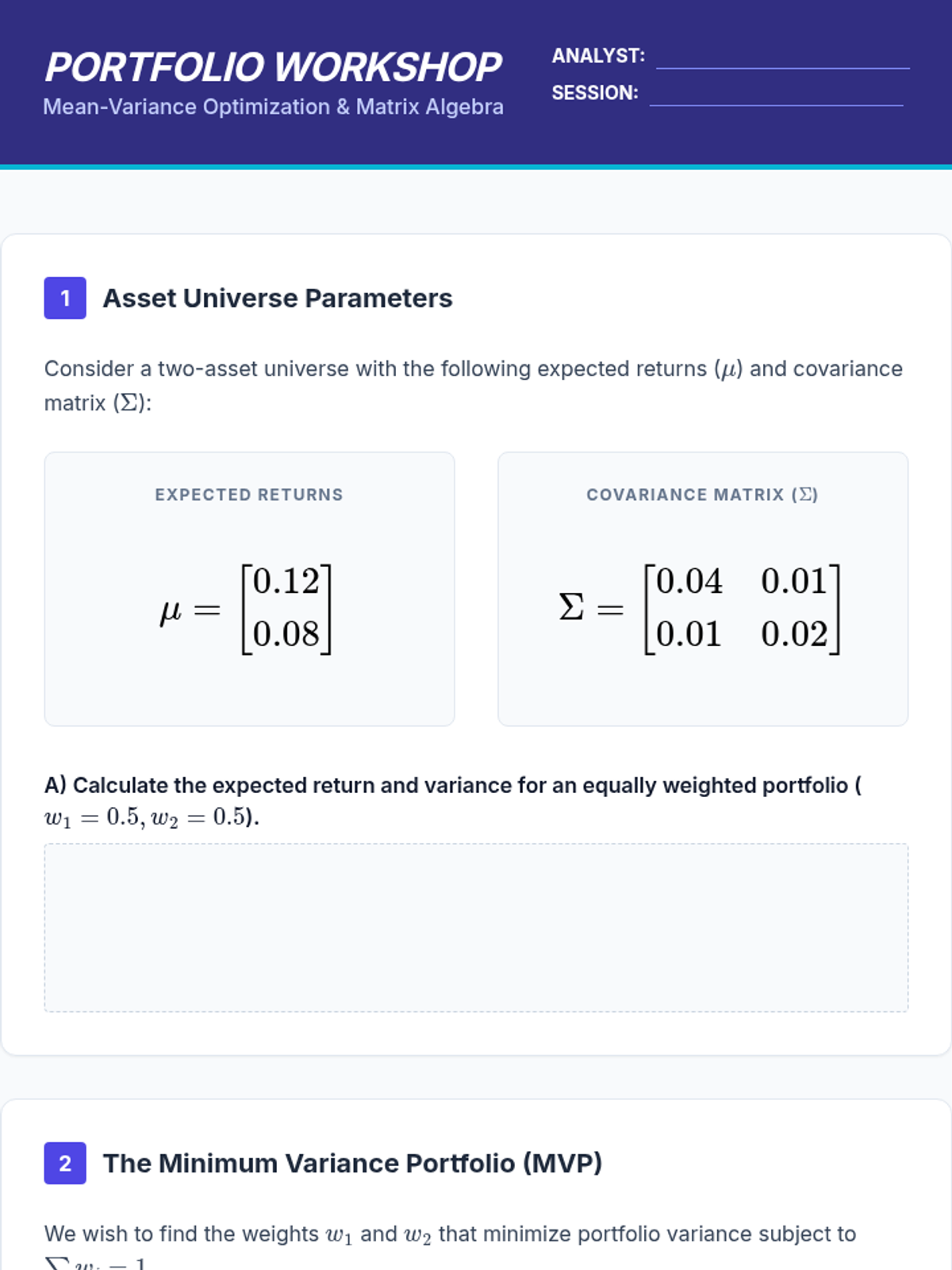
Application of expected value to asset returns using matrix algebra to derive the Efficient Frontier and optimize portfolios.
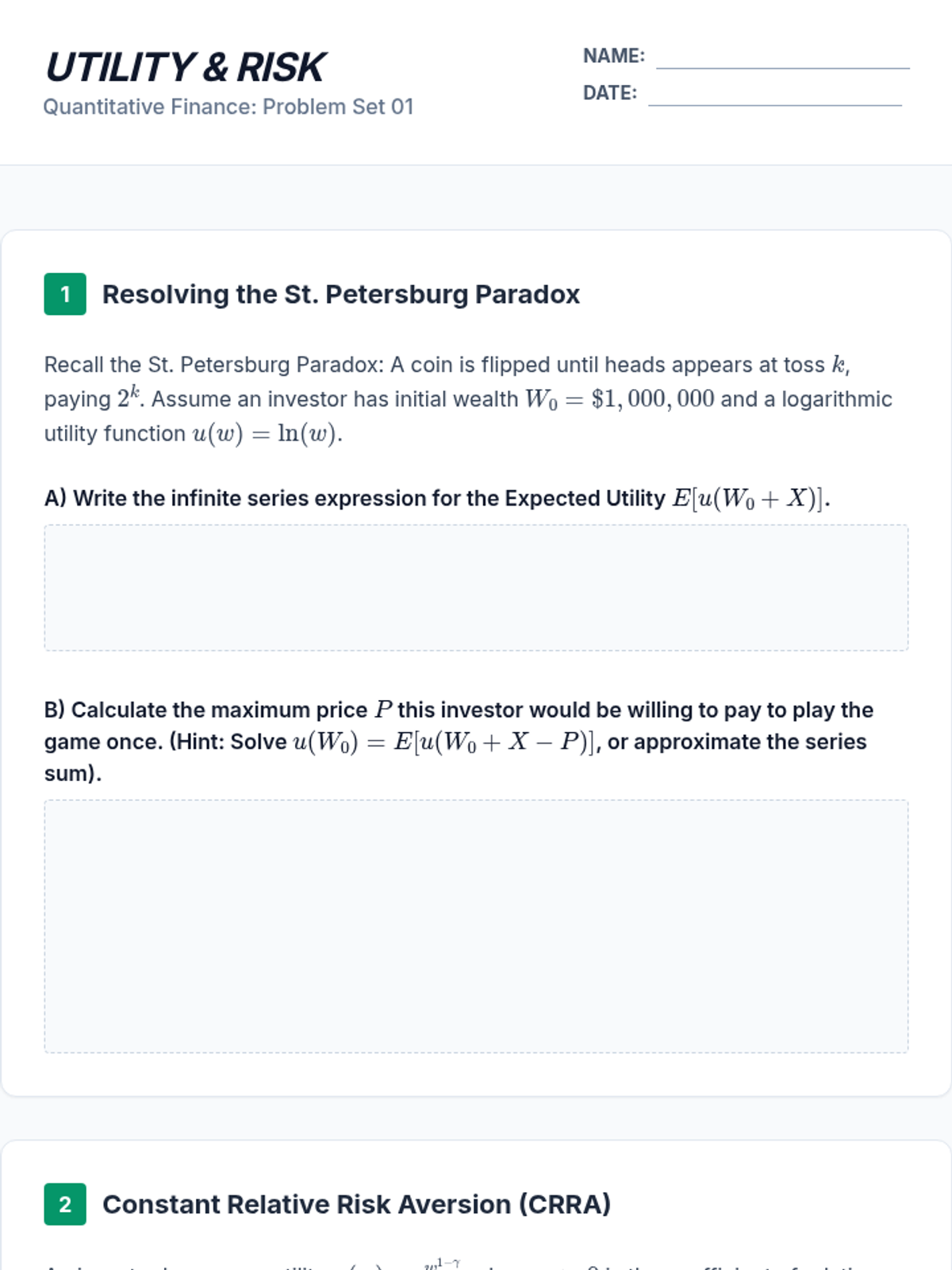
Students contrast mathematical expected value with expected utility to explain decision-making under uncertainty, analyzing different utility functions to model risk-averse behavior.
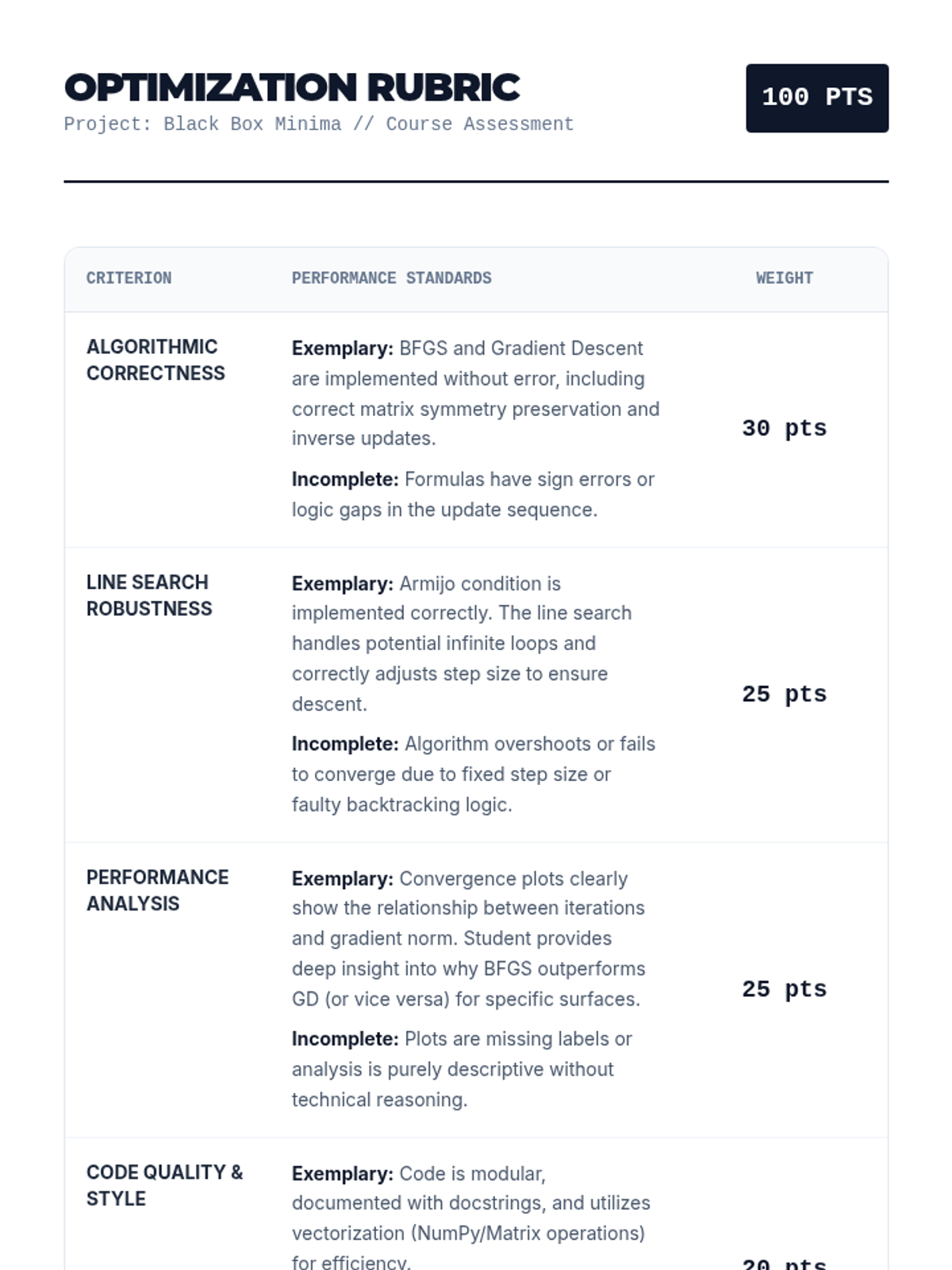
A culminating project where students implement and tune their own optimization library to minimize a complex 'black box' function.
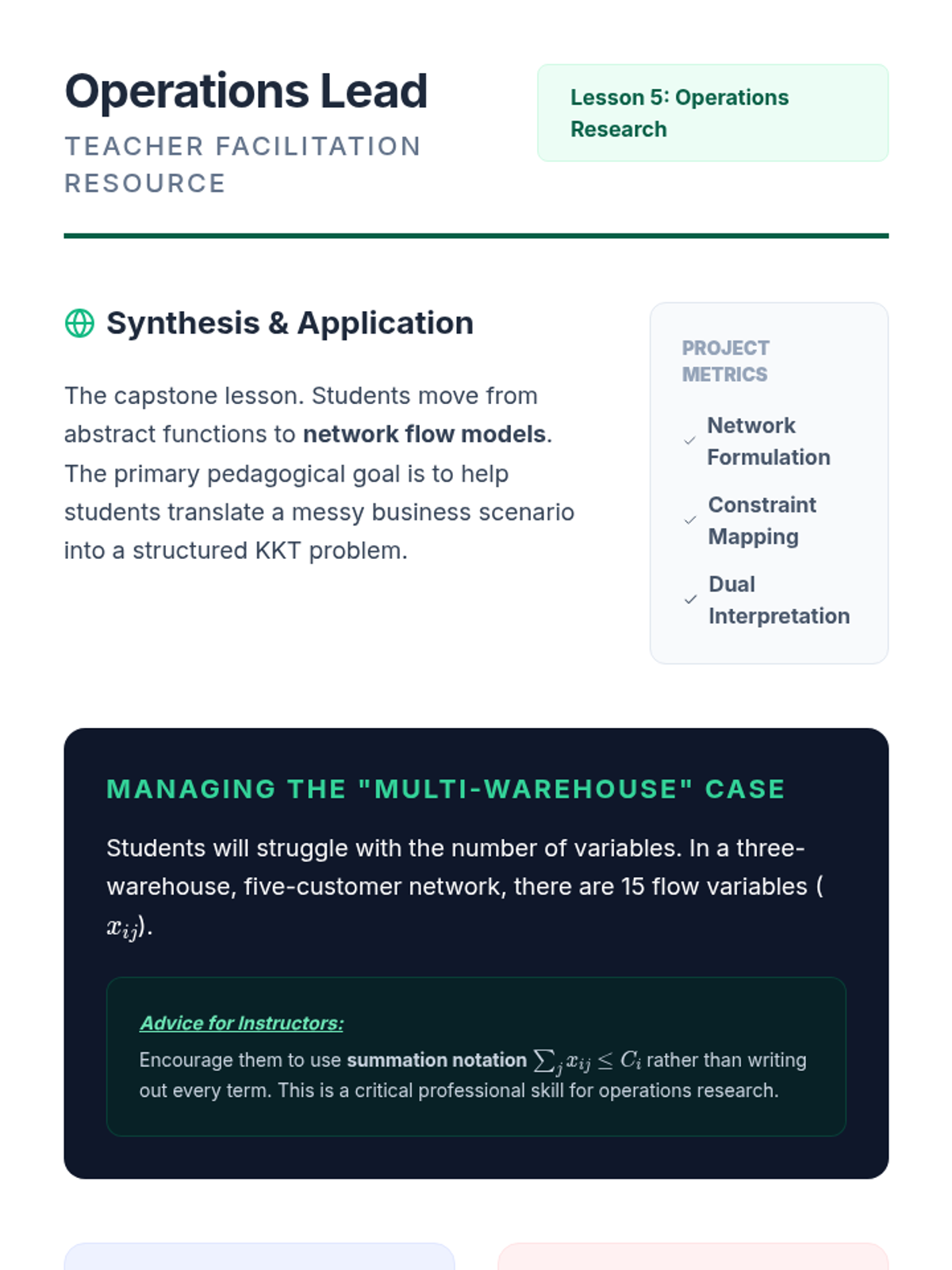
Applies constrained optimization techniques to complex, real-world logistical and industrial problems in operations research.
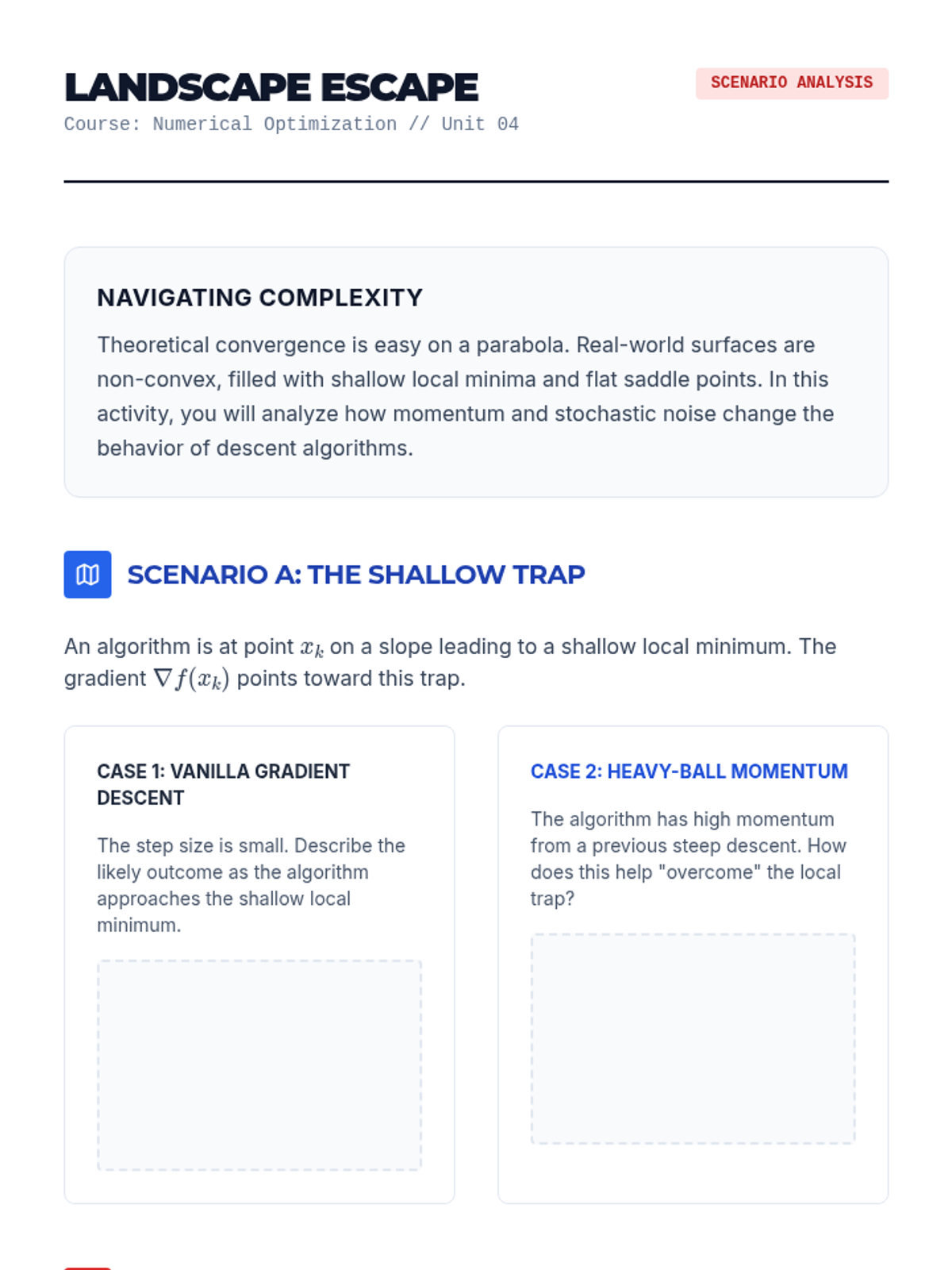
Techniques for navigating non-convex objective functions, including strategies to escape local minima and handle saddle points using momentum and stochastic methods.
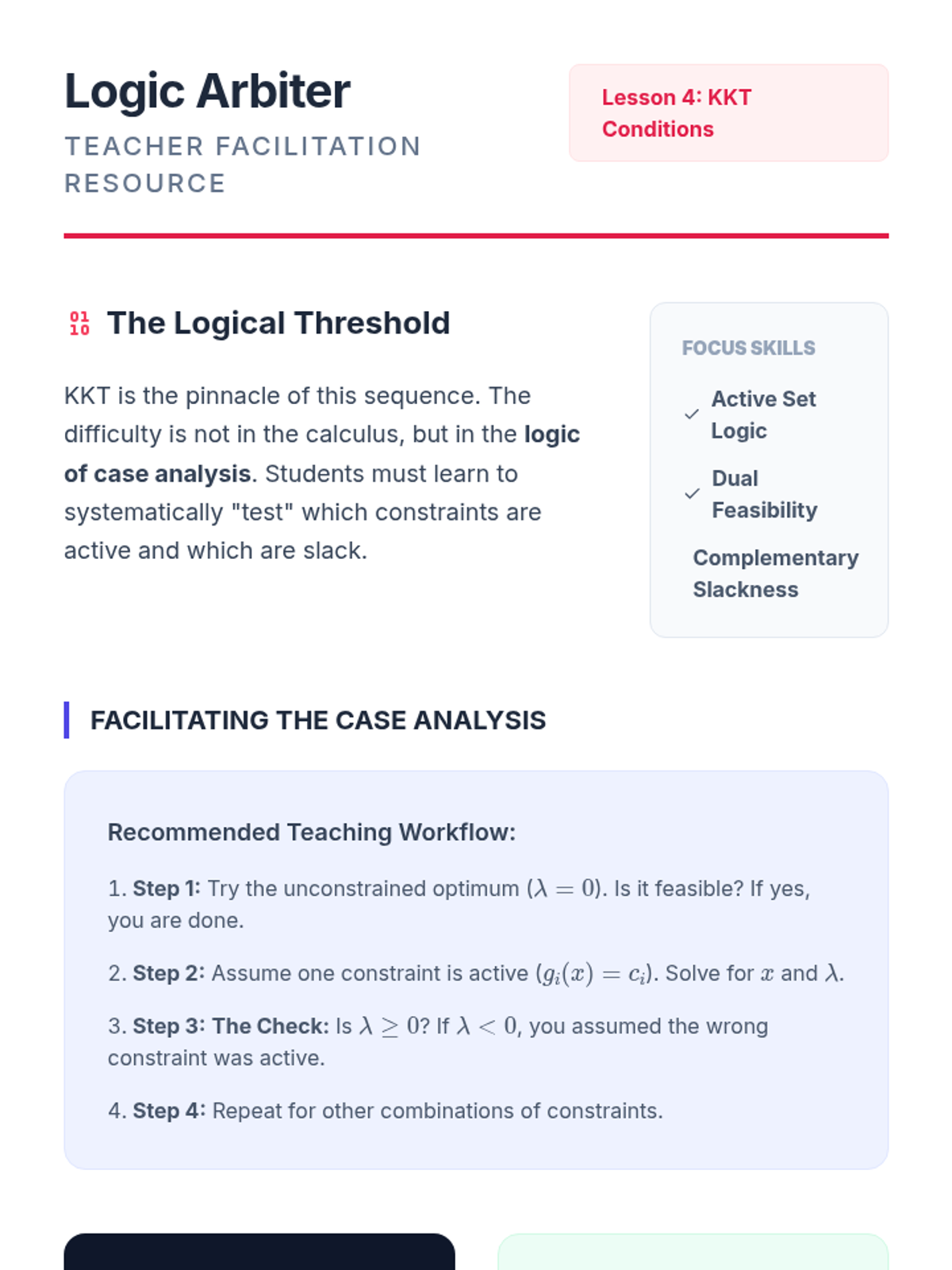
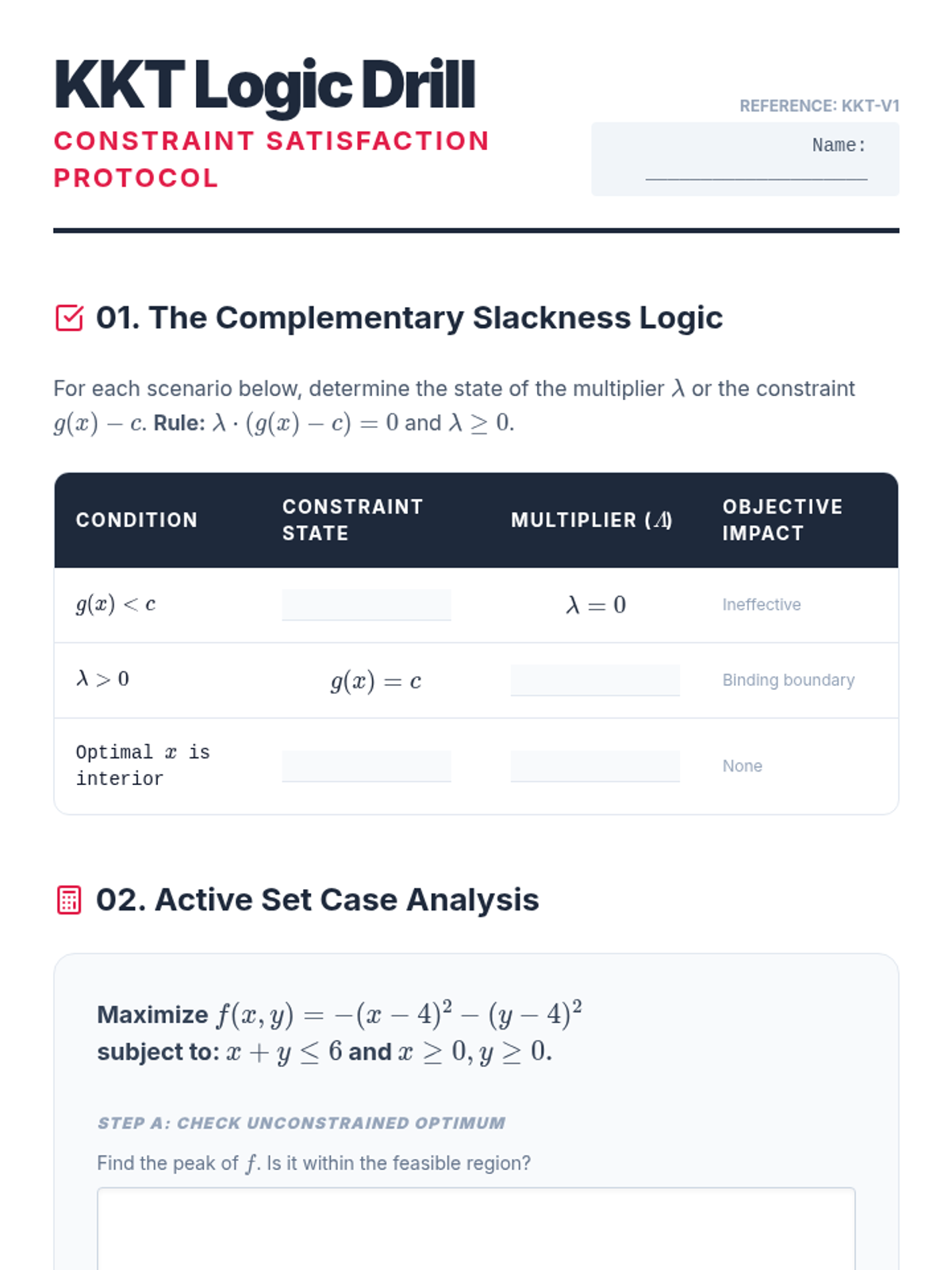
Introduces the Karush-Kuhn-Tucker conditions for solving problems with inequality constraints.
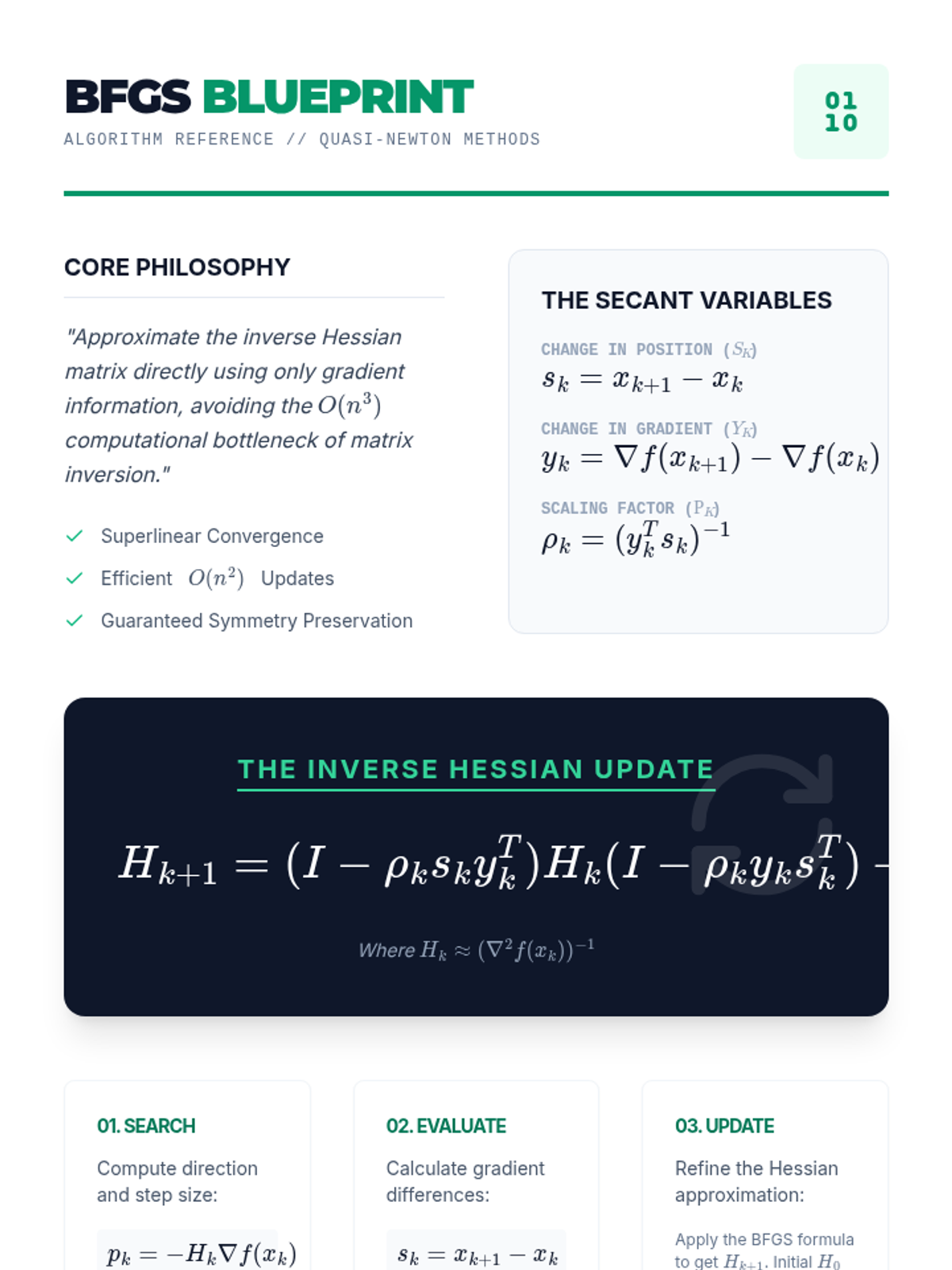
Investigation of Quasi-Newton methods, specifically the BFGS algorithm, which approximates the Hessian to provide near-Newton performance without the full computational overhead.
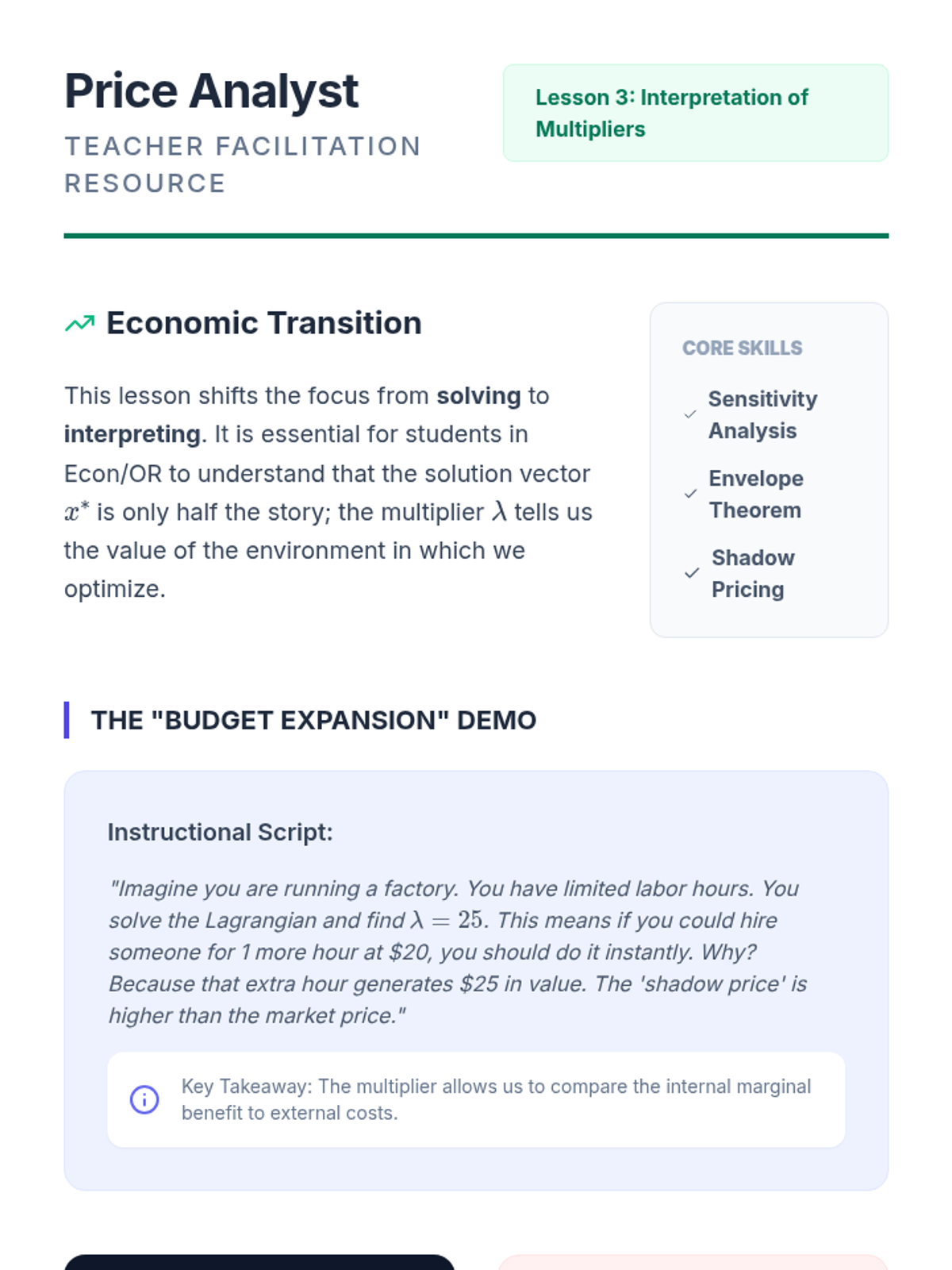
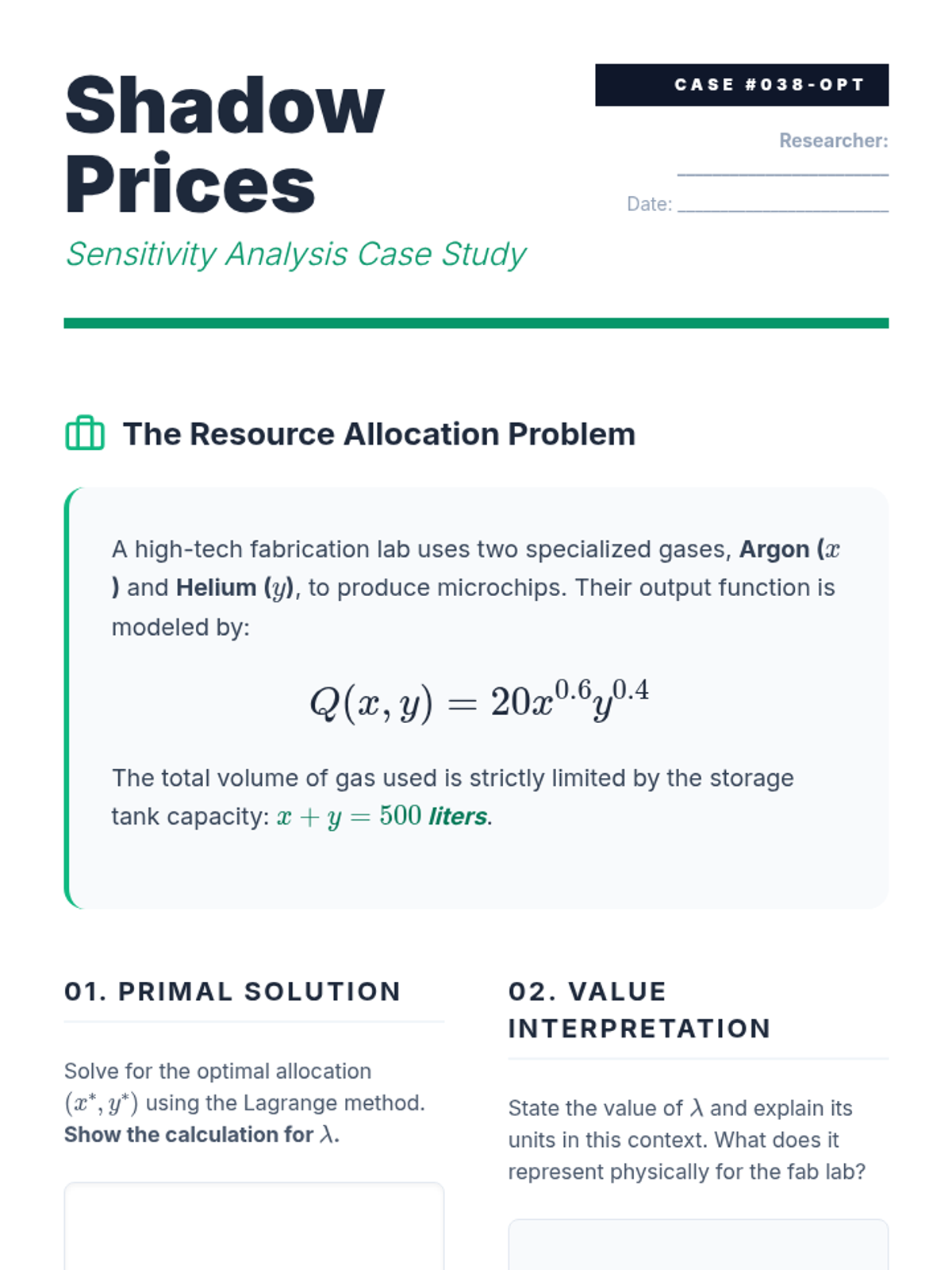
Analyzes the economic and physical meaning of Lagrange multipliers as shadow prices and marginal values.
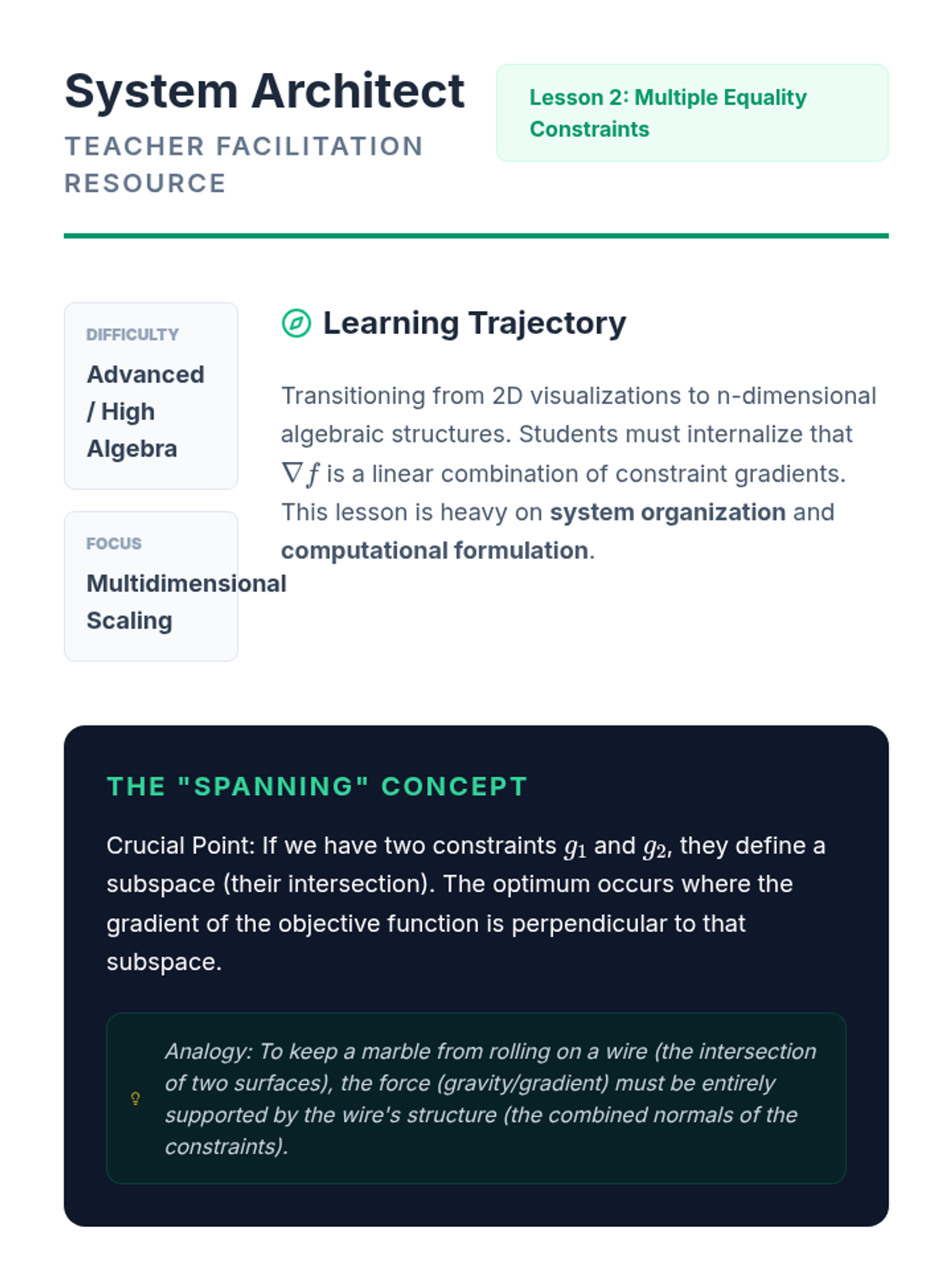
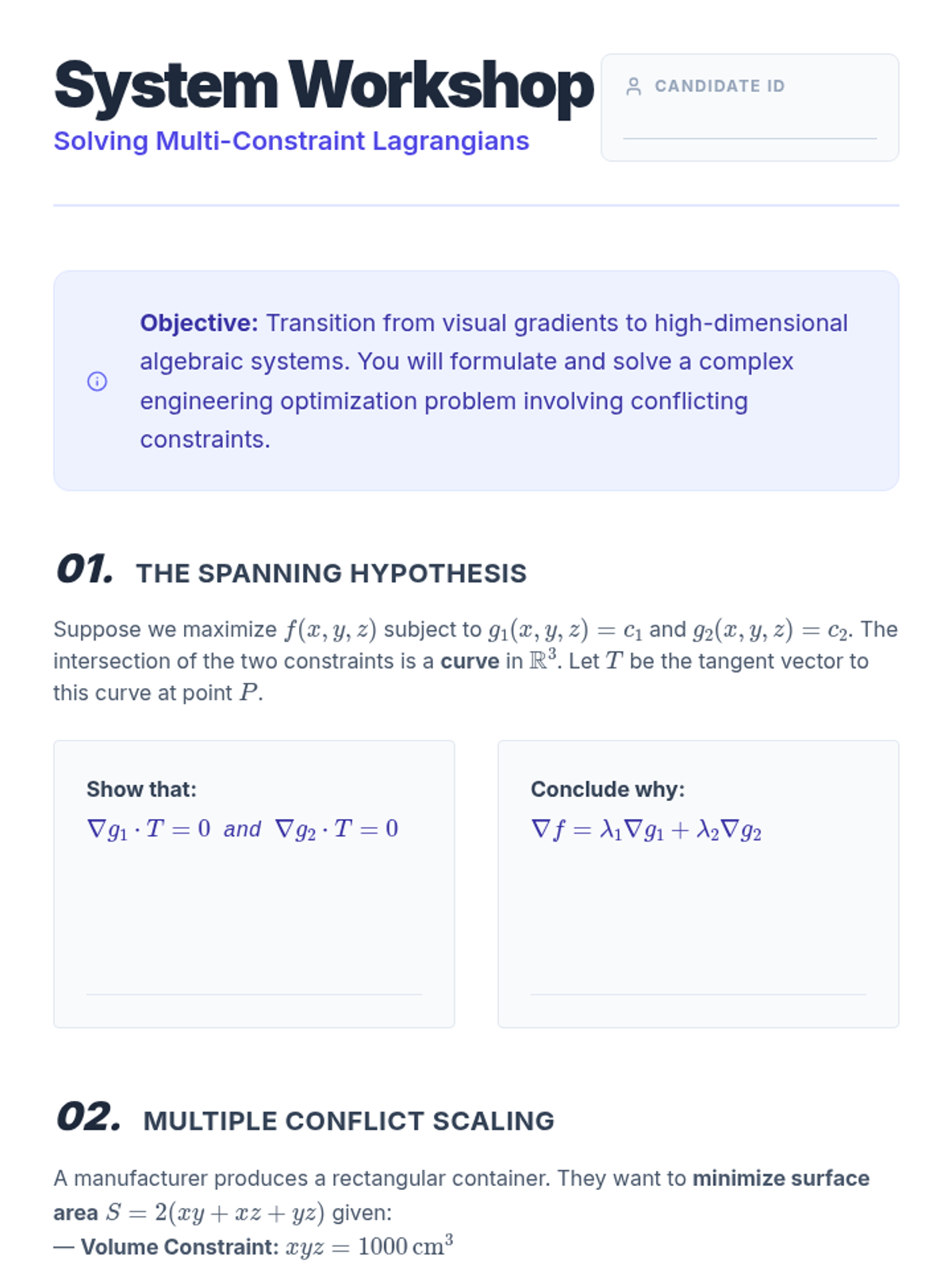
Scales optimization techniques to handle multiple simultaneous equality constraints in high-dimensional spaces.
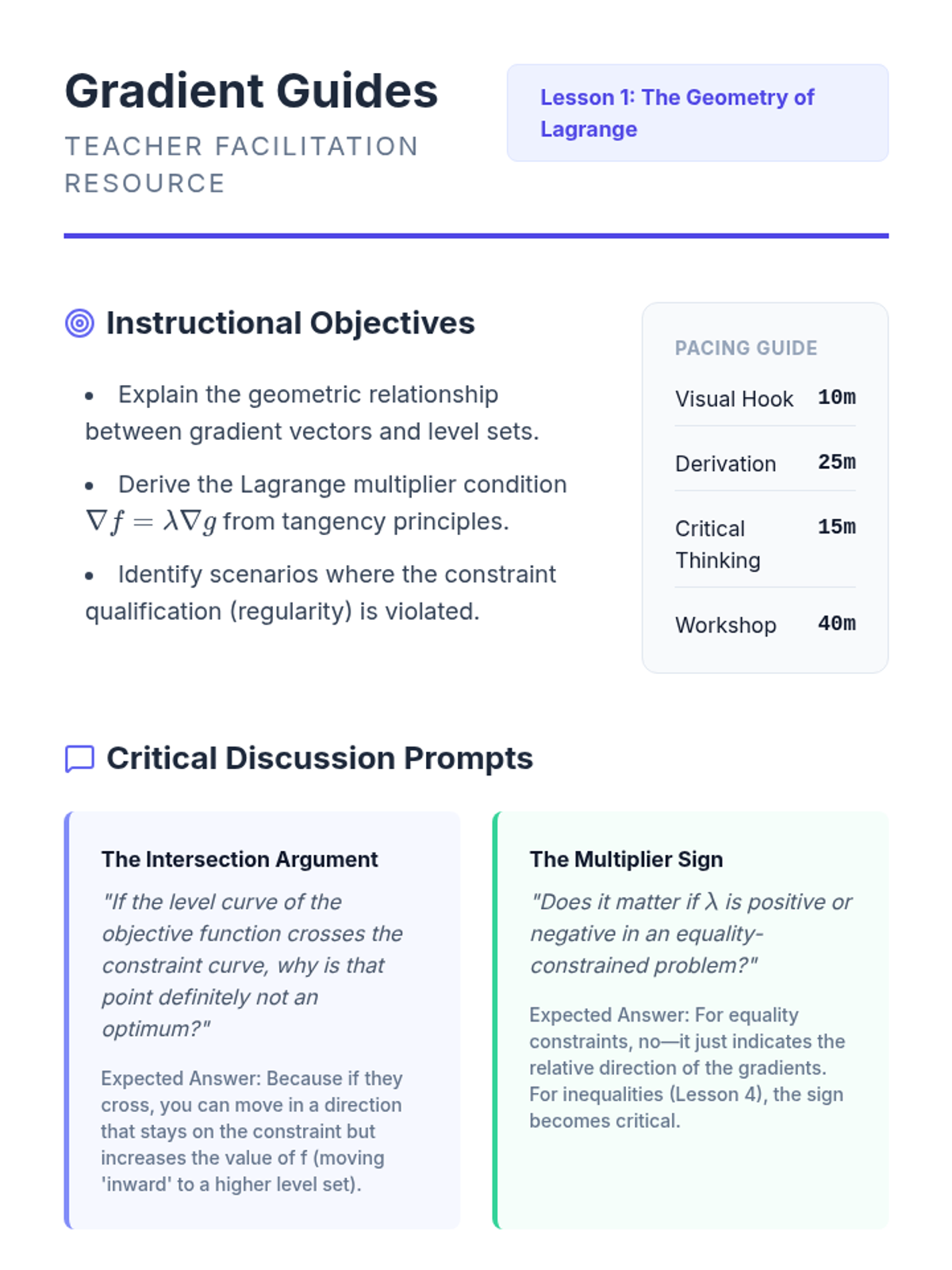
Explores the geometric relationship between objective function level curves and constraint surfaces, focusing on gradient alignment.
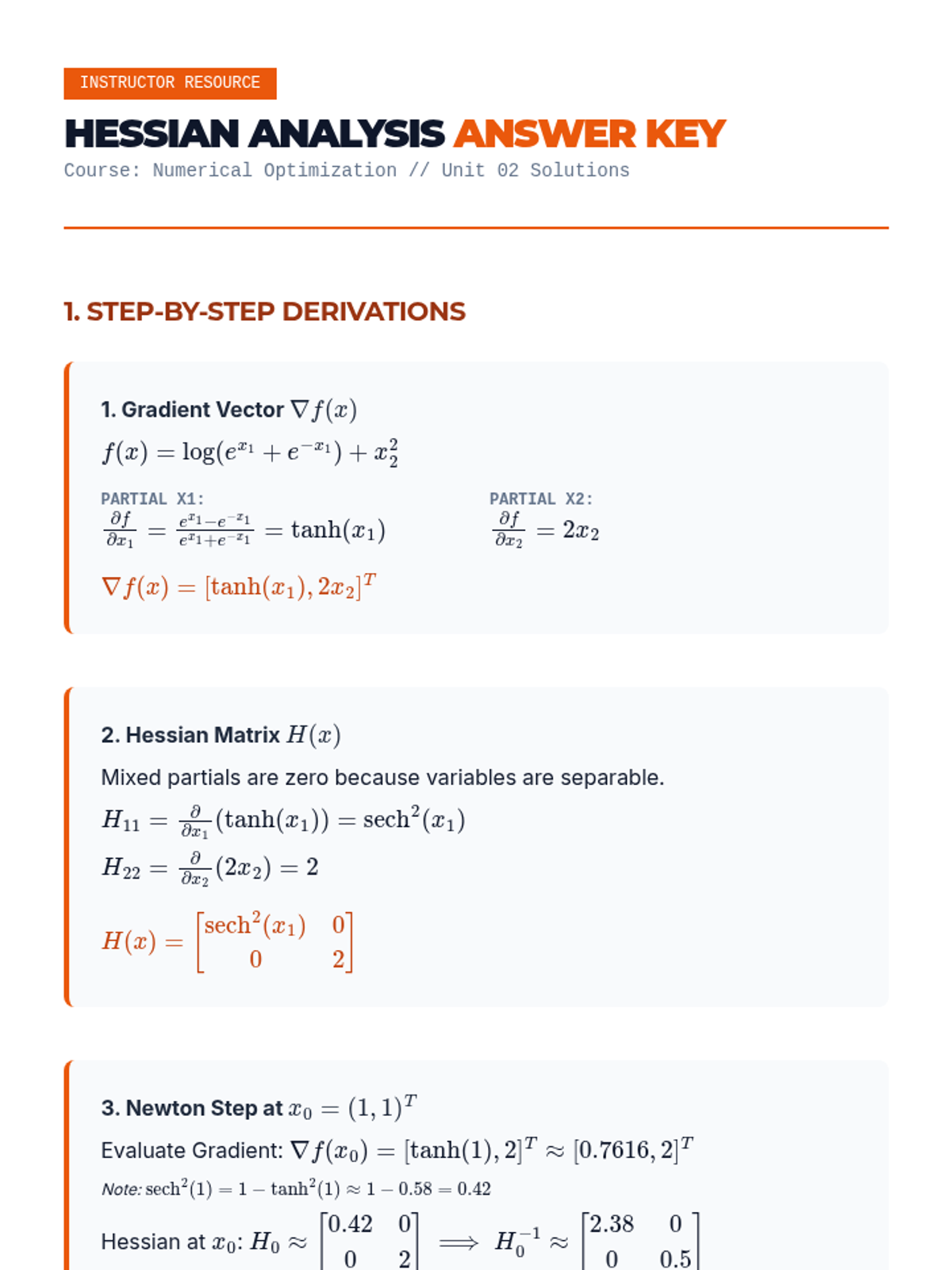
Exploration of second-order optimization using the Hessian matrix, focusing on Newton's method and its superior quadratic convergence properties compared to first-order methods.
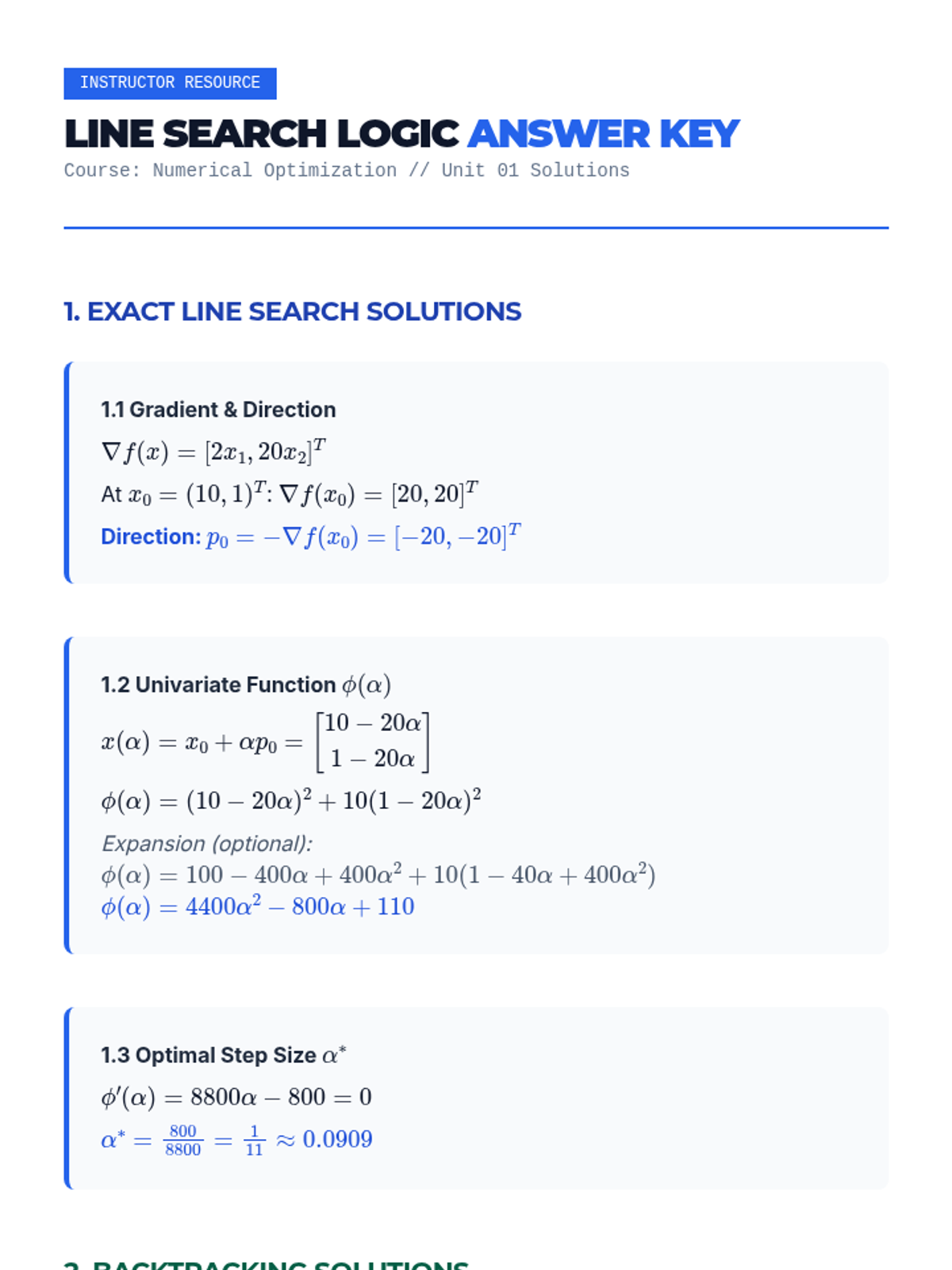
Introduction to iterative descent methods, focusing on the gradient descent algorithm and the critical role of line search methods for choosing optimal step sizes.